") e2studio開發(fā)LPS28DFW氣壓計(jì)(2)----水壓檢測
e2studio開發(fā)LPS28DFW氣壓計(jì)(2)----水壓檢測
概述
本文將介紹如何使用 LPS28DFW 傳感器來讀取的壓強(qiáng)數(shù)據(jù),來估算水下深度,可以利用液體靜壓的原理。
水壓計(jì)算
對于水平地面的固體對地面產(chǎn)生的壓強(qiáng),由于壓力大小等于重力,計(jì)算固體壓力時(shí)一般都會(huì)先計(jì)算壓力后計(jì)算壓強(qiáng),所以 F=G 在固體中經(jīng)常用到,但同時(shí)我們又要明確知道壓力與重力的不同。對于液體計(jì)算公式的由來,同一深度朝各個(gè)方向都有壓強(qiáng)且相等;密度相同時(shí),深度越深壓強(qiáng)越大;深度相同
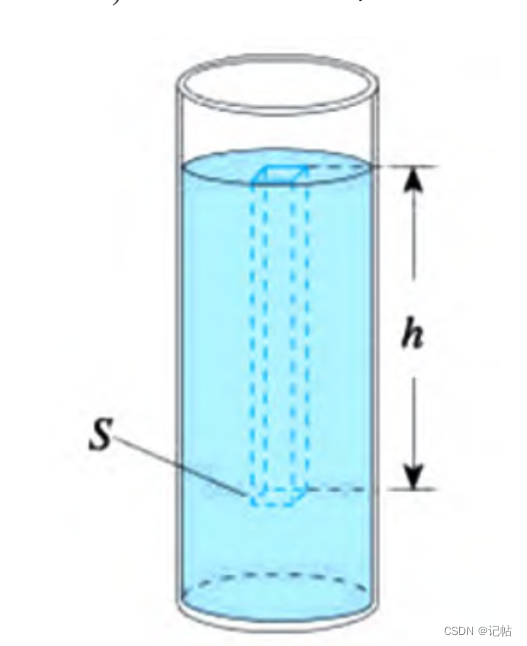
時(shí),密度越大壓強(qiáng)越大。這只是定性的關(guān)系,對于定量關(guān)系則是建立了一個(gè)規(guī)則形狀的液柱,設(shè)想
液柱下方平面的壓強(qiáng)就是該位置的液體壓強(qiáng)大小。如下圖所示,液柱對平面的壓力等于液柱所受
的重力,借助于公式的變形 F=G=mg=ρVg=ρgSh ,從而推出 P=F/S=ρgh 。由于液體同一深度朝各個(gè)方向都有壓強(qiáng)且相等,所以這個(gè)公式就可以普遍計(jì)算同一深度其他位置的液體壓強(qiáng)大小。
其中:
● P 是液體的壓力(即氣壓計(jì)測得的壓力值),
● ρ 是液體的密度(通常在20°C下水密度為1000 kg/m3)
● g 是重力加速度(通常取9.8 m/s2),
● h 是液體的深度。
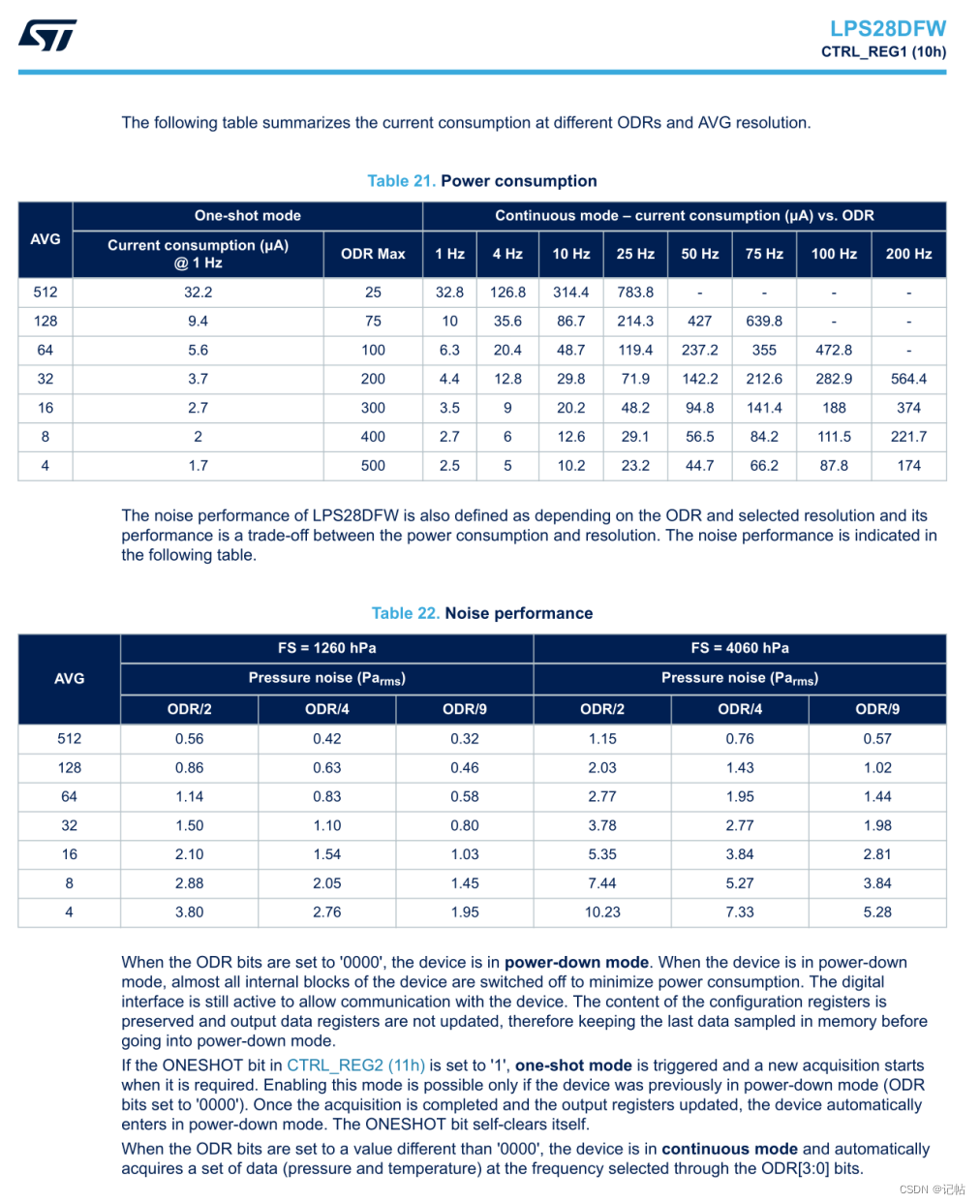
設(shè)置速率和分辨率
對于 LPS28DFW 氣壓傳感器,CTRL_REG1(10h)和 CTRL_REG2(11h)的主要設(shè)置如下:
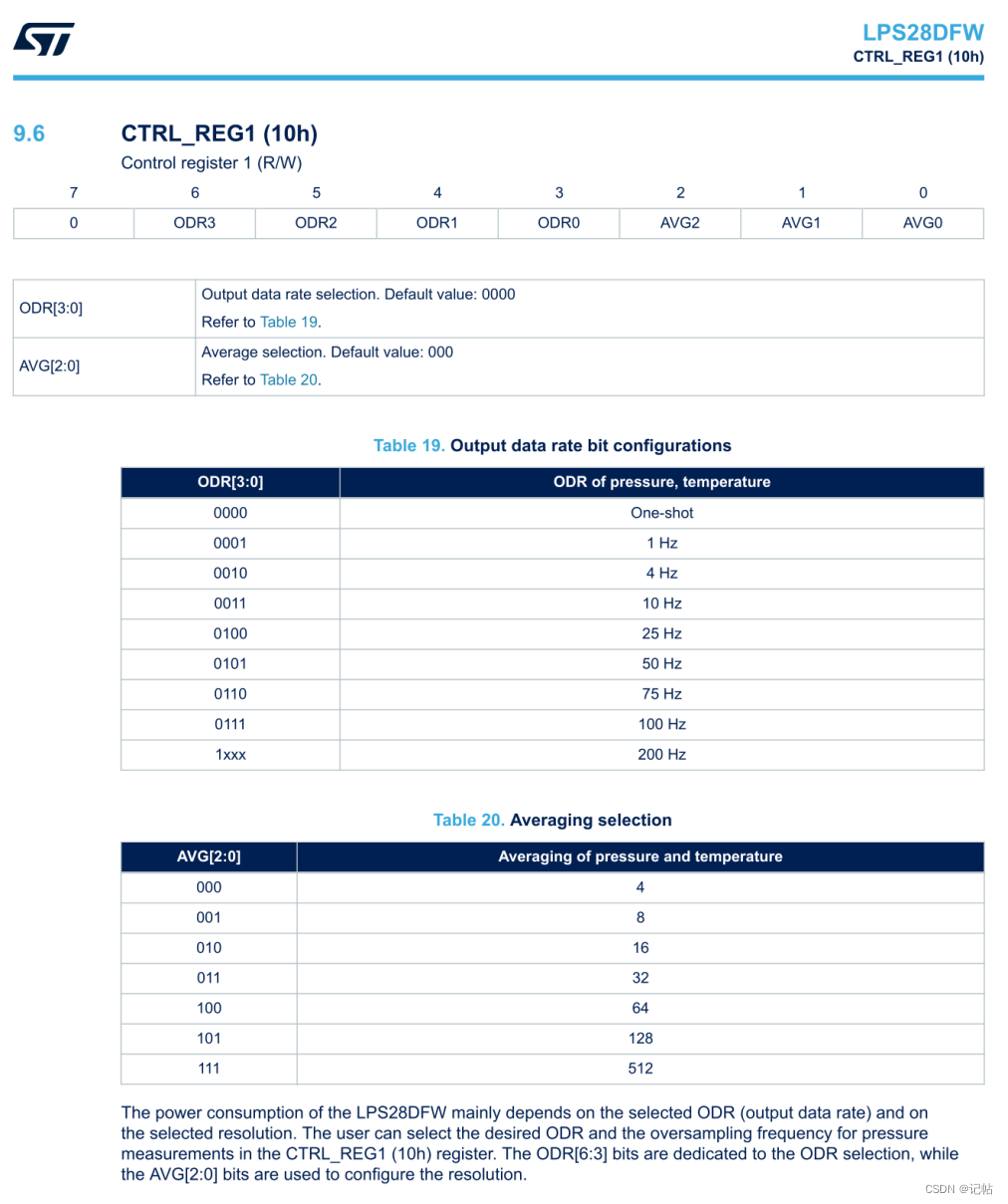
CTRL_REG1(10h)
● ODR[3:0]:輸出數(shù)據(jù)速率選擇。默認(rèn)值:0000。具體的配置值見數(shù)據(jù)表 19。
● AVG[2:0]:平均值選擇。默認(rèn)值:000。具體的配置值見數(shù)據(jù)表 20。
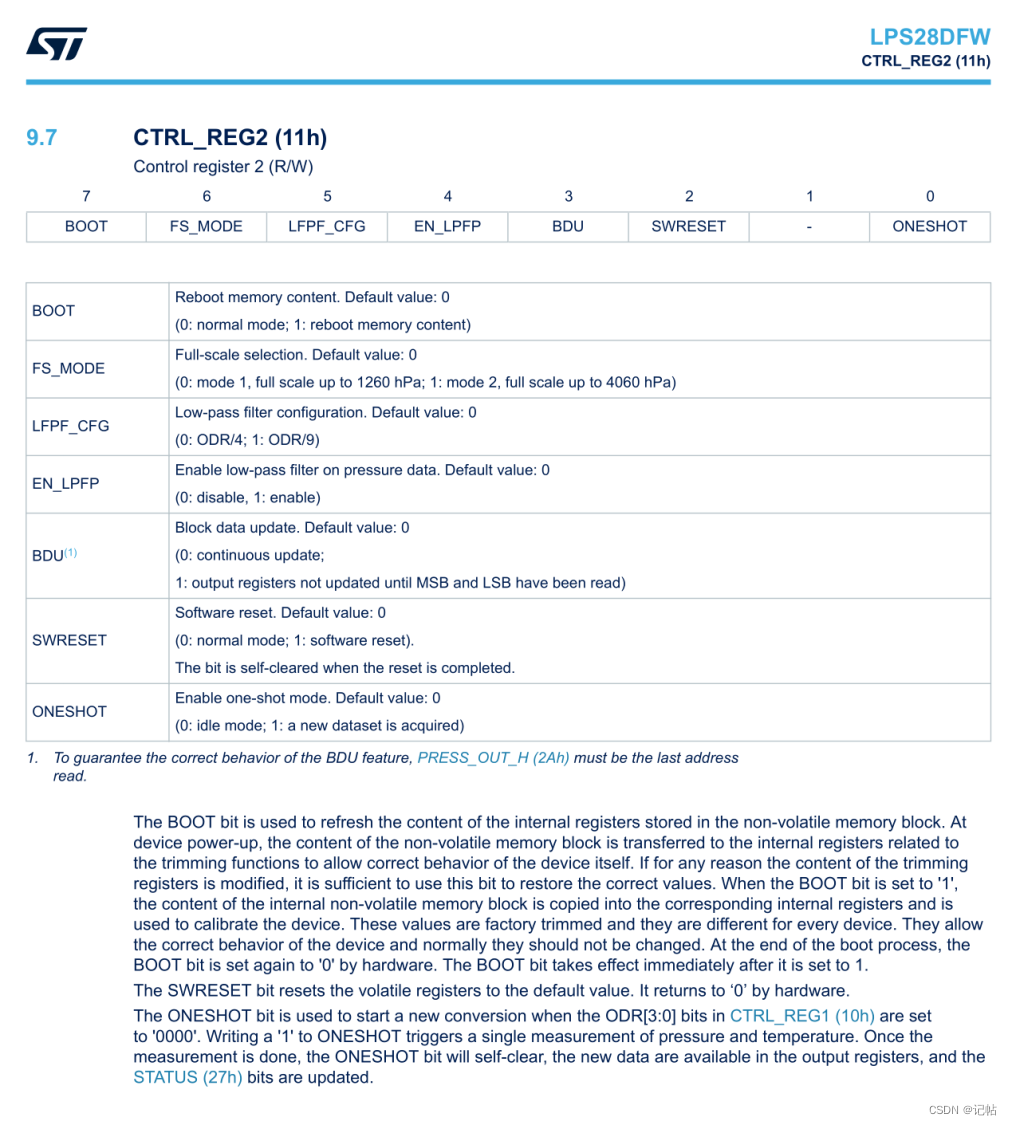
CTRL_REG2(11h)
● BOOT:重新啟動(dòng)內(nèi)存內(nèi)容。默認(rèn)值:0(0:正常模式;1:重新啟動(dòng)內(nèi)存內(nèi)容)。
● FS_MODE:全量程選擇。默認(rèn)值:0(0:模式1,全量程高達(dá)1260 hPa;1:模式2,全量程高達(dá)4060 hPa)。
● LFPF_CFG:低通濾波器配置。默認(rèn)值:0(0:ODR/4;1:ODR/9)。
● EN_LPFP:啟用壓力數(shù)據(jù)上的低通濾波器。默認(rèn)值:0(0:禁用;1:啟用)。
● BDU:塊數(shù)據(jù)更新。默認(rèn)值:0(0:連續(xù)更新;1:直到讀取了 MSB 和 LSB 之前,輸出寄存器不更新)。
● SWRESET:軟件復(fù)位。默認(rèn)值:0(0:正常模式;1:軟件復(fù)位)。復(fù)位完成時(shí)位自動(dòng)清零。
● ONESHOT:啟用一次性模式。默認(rèn)值:0(0:空閑模式;1:獲取新的數(shù)據(jù)集)。
設(shè)置輸出數(shù)據(jù)速率 (md.odr = LPS28DFW_1Hz):將輸出數(shù)據(jù)速率設(shè)置為每秒 1 次(1Hz)。較低的數(shù)據(jù)速率通常可以減少噪聲,從而提高測量的準(zhǔn)確性。
設(shè)置平均值 (md.avg = LPS28DFW_512_AVG):選擇 512 次平均。這意味著傳感器將獲取 512 個(gè)樣本并計(jì)算它們的平均值作為最終輸出。平均更多的樣本可以顯著減少隨機(jī)噪聲,從而提高數(shù)據(jù)的穩(wěn)定性和準(zhǔn)確性。
設(shè)置低通濾波器 (md.lpf = LPS28DFW_LPF_ODR_DIV_9):低通濾波器設(shè)置為 ODR/9,這將進(jìn)一步平滑輸出數(shù)據(jù),消除高頻噪聲。
設(shè)置全量程 (md.fs = LPS28DFW_1260hPa):選擇全量程為 1260hPa。這種較低的全量程可能更適合于測量較小的壓力變化,進(jìn)一步提高測量精度。
應(yīng)用這些設(shè)置 (lps28dfw_mode_set(&dev_ctx, &md)):最后,這些配置通過 lps28dfw_mode_set 函數(shù)應(yīng)用于傳感器。
這樣的設(shè)置組合有助于提高 LPS28DFW 傳感器的精度,特別是通過降低噪聲和增加測量穩(wěn)定性。這些設(shè)置對于需要高精度測量的應(yīng)用場景特別有用。
/* Set Output Data Rate */ md.odr = LPS28DFW_1Hz; md.avg = LPS28DFW_512_AVG; md.lpf = LPS28DFW_LPF_ODR_DIV_9; md.fs = LPS28DFW_1260hPa; lps28dfw_mode_set(&dev_ctx, &md);
輪詢讀取數(shù)據(jù)
水下每增加一定深度,水的壓力就會(huì)增加。這個(gè)增加的壓力與水的深度成正比。公式中減去的 氣壓值 是為了將傳感器讀數(shù)調(diào)整為相對于大氣壓的壓力。這是因?yàn)閭鞲衅鳒y得的是絕對壓力,包括了大氣壓在內(nèi)。
公式中的密度和重力加速度用的是標(biāo)準(zhǔn)單位(千克每立方米和米每平方秒),而壓強(qiáng)用的是百帕。因此,計(jì)算出的水深是以米為單位的。最后,為了將結(jié)果以更易讀的形式(厘米)展示,乘以了 100*100。
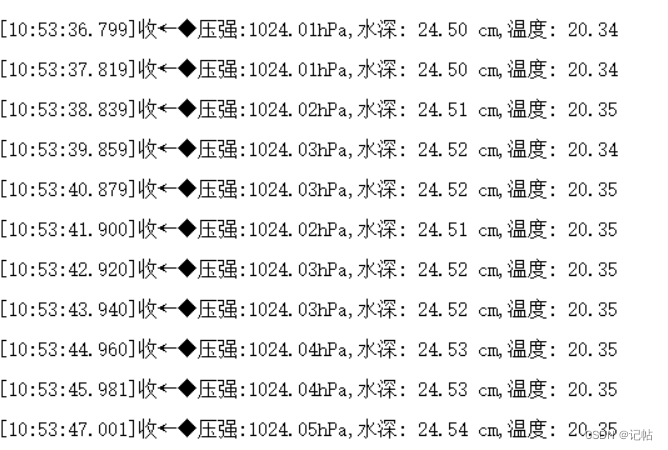
while(1) { /* Read output only if new values are available */ lps28dfw_all_sources_get(&dev_ctx, &all_sources); if ( all_sources.drdy_pres | all_sources.drdy_temp ) { lps28dfw_data_get(&dev_ctx, &md, &data); if(i==0) { open_h =data.pressure.hpa; printf("first pressure:%6.2fhPa,temperature:%6.2frn",open_h,data.heat.deg_c); i++; } else { float h; h=(data.pressure.hpa-open_h)/(1000*9.8);//水深=壓強(qiáng)/(水密度*重力加速度) //1百帕 (hPa)= 100 Pa = 1 mbar1千帕 (kPa)= 1000 Pa = 10 hPa printf("pressure:%6.2fhPa,h:%6.2f cm,temperature:%6.2frn",data.pressure.hpa,h*100*100,data.heat.deg_c); } } }
測試結(jié)果
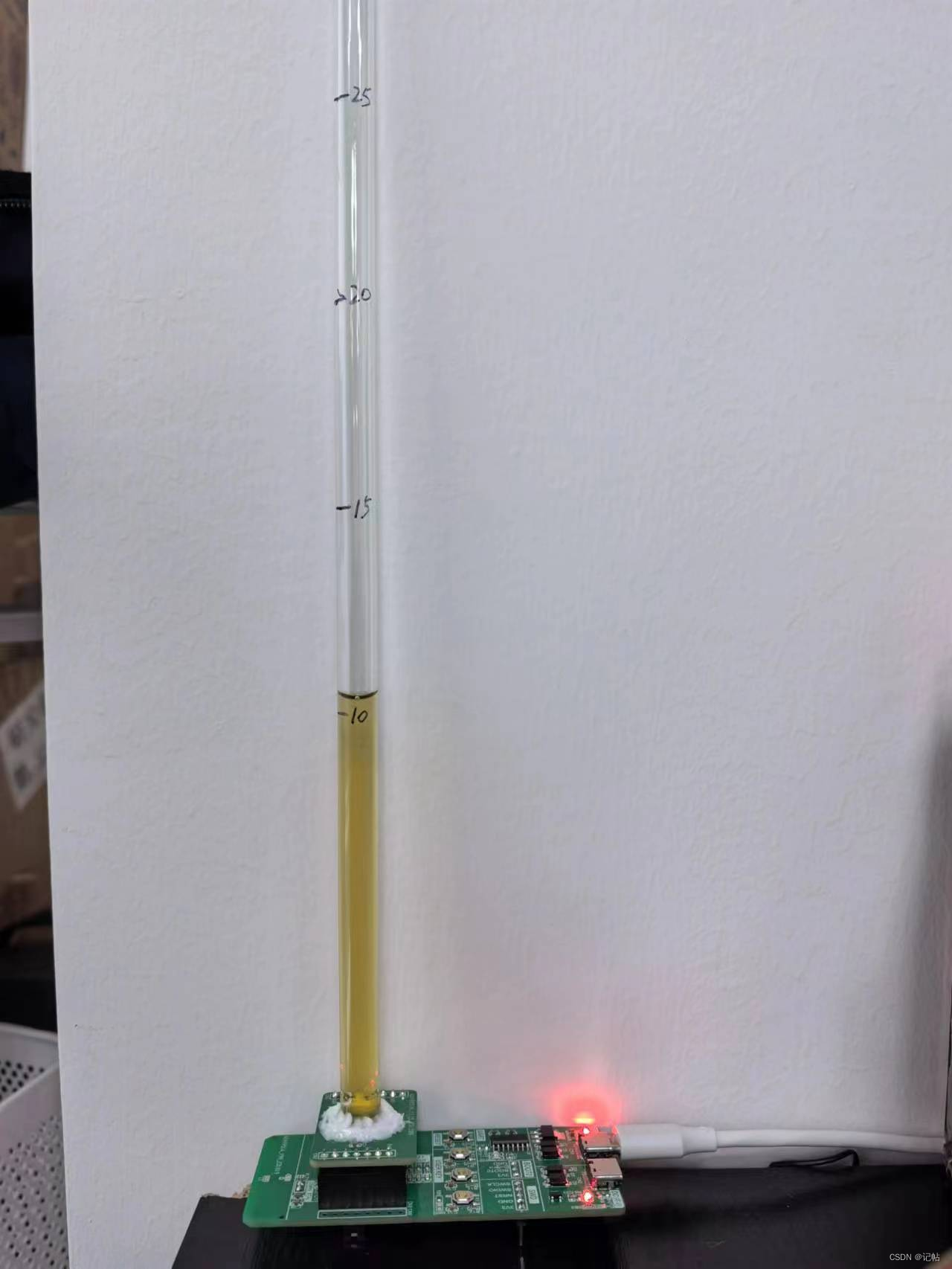
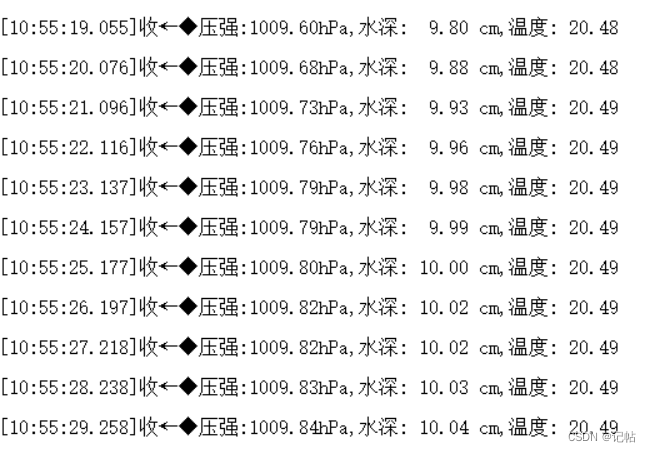
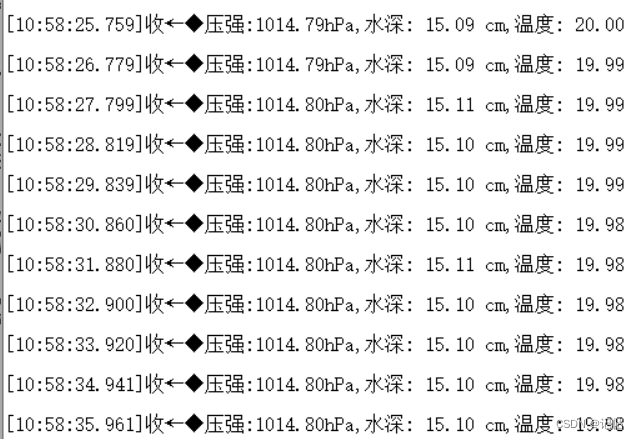
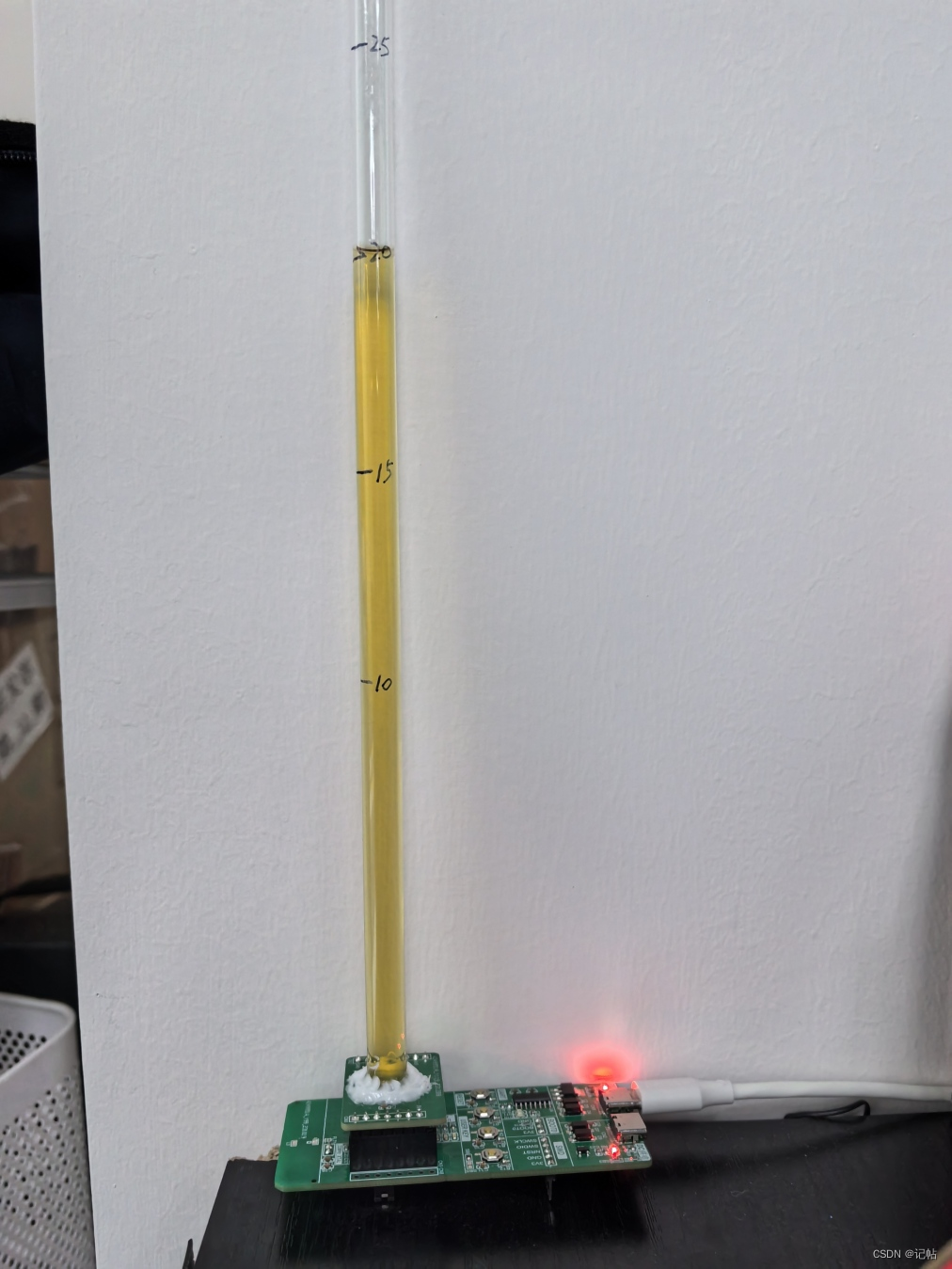
10cm測試情況如下。
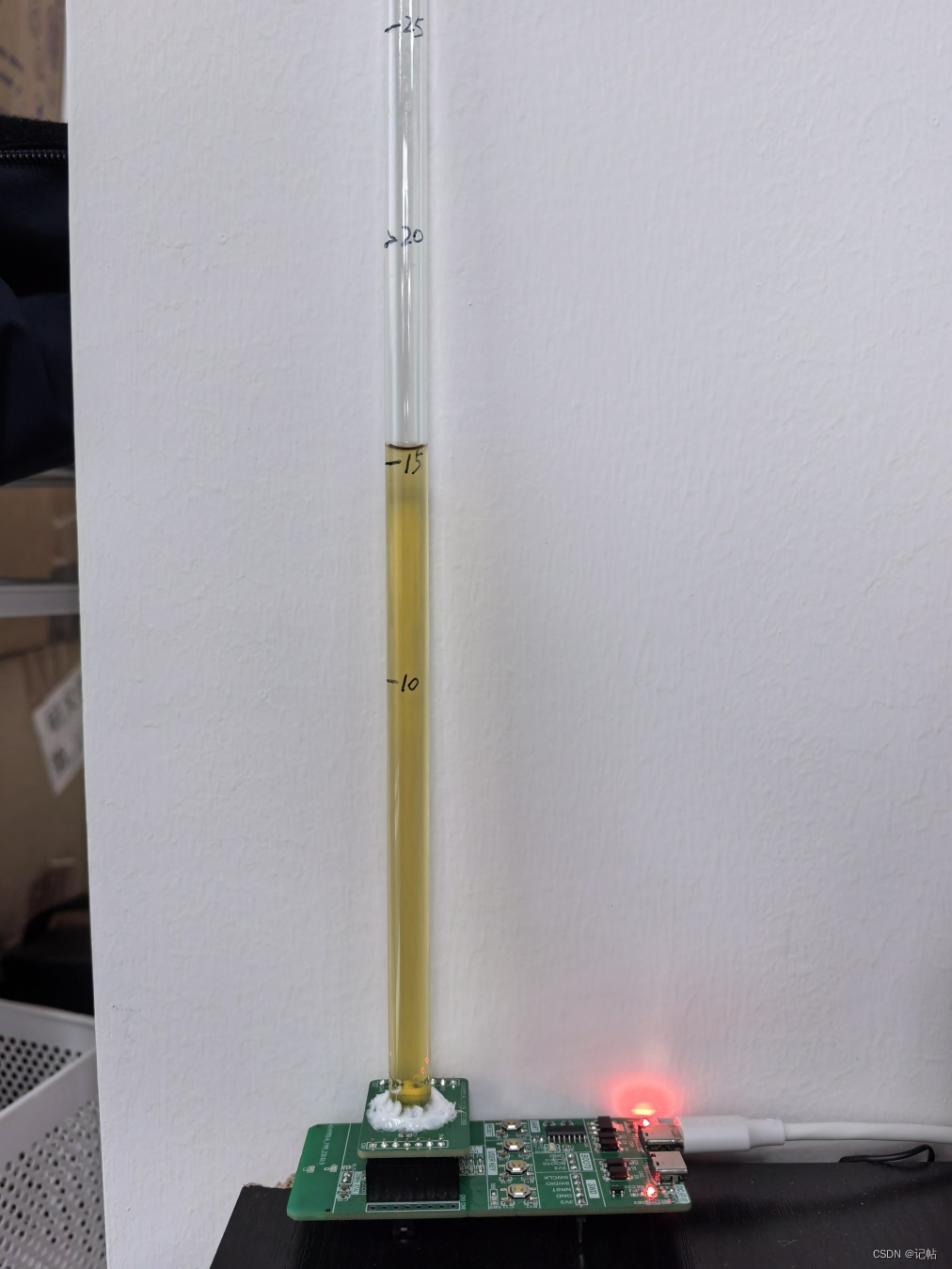
15cm測試情況如下。
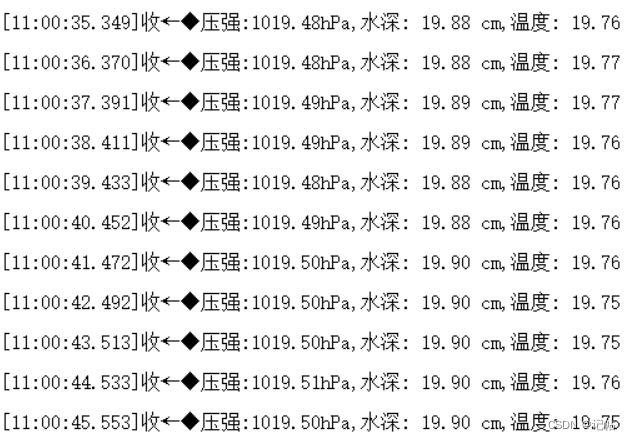
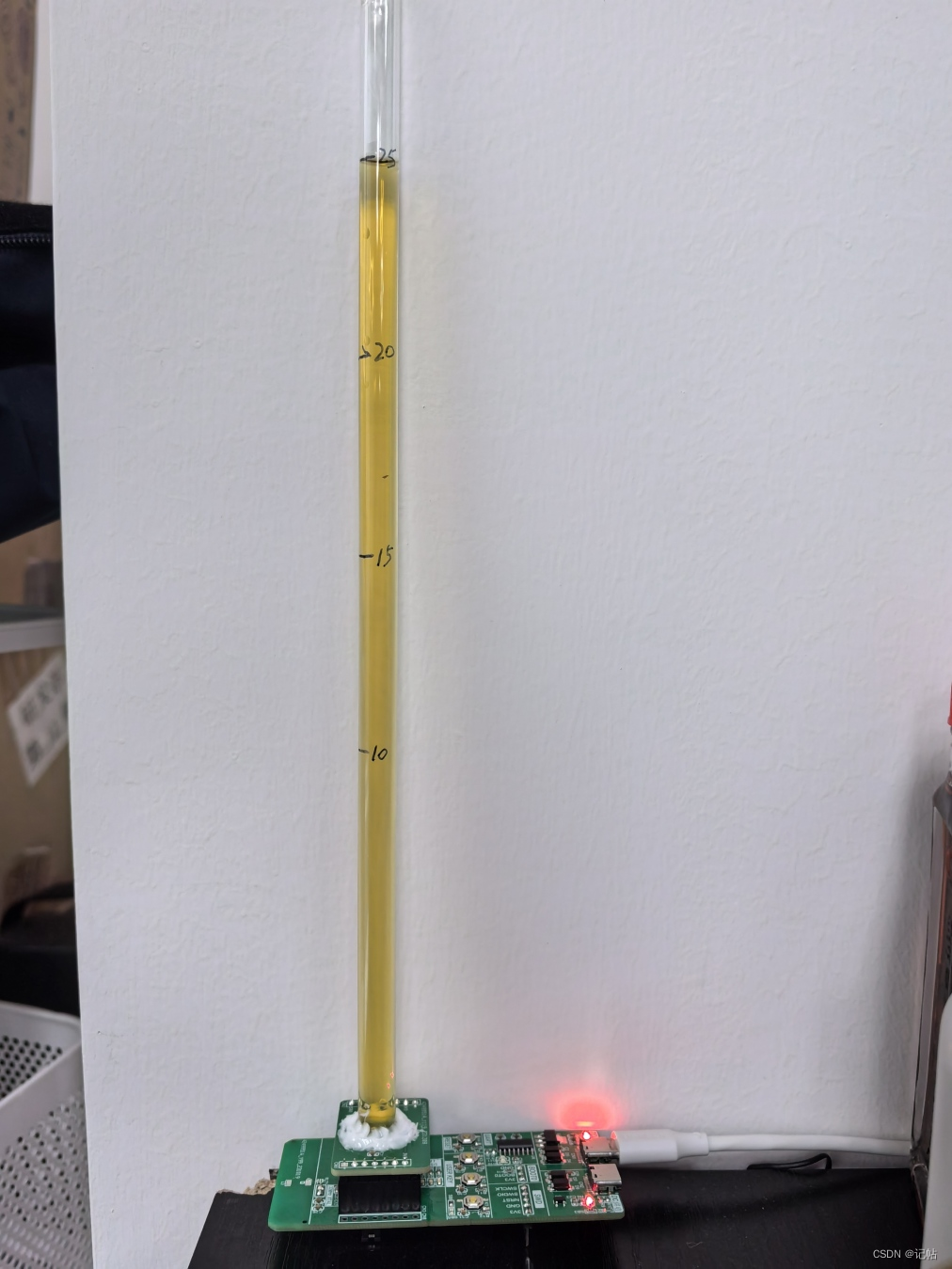
20cm測試情況如下。
25cm測試情況如下。
-
mcu
+關(guān)注
關(guān)注
146文章
17824瀏覽量
360242 -
檢測
+關(guān)注
關(guān)注
5文章
4601瀏覽量
92527 -
Studio
+關(guān)注
關(guān)注
2文章
203瀏覽量
29503 -
氣壓計(jì)
+關(guān)注
關(guān)注
1文章
55瀏覽量
18464
發(fā)布評論請先 登錄
氣壓高度傳感器是什么?如何選擇?

使用e2studio軟件新建瑞薩RA系列MCU工程

FA10-220S28E2D4 FA10-220S28E2D4

e2studio和Keil簡介及如何安裝e2studio開發(fā)環(huán)境

【瑞薩RA2L1入門學(xué)習(xí)】+ MacOS安裝e2studio
【瑞薩RA2L1入門學(xué)習(xí)】2. PWM呼吸燈
【瑞薩RA2L1入門學(xué)習(xí)】+ MacOS安裝e2studio
氣壓傳感器的校準(zhǔn)方法 無線氣壓傳感器的使用優(yōu)勢
氣壓計(jì)LPS22DF開發(fā)(1)----輪詢獲取氣壓計(jì)數(shù)據(jù)
使用bq2060氣壓計(jì)IC的先進(jìn)功能

瑞薩e2studio(1)----瑞薩芯片之搭建FSP環(huán)境
e2studio開發(fā)三軸加速度計(jì)LIS2DW12(4)----測量傾斜度

e2studio開發(fā)LPS28DFW氣壓計(jì)(1)----輪詢獲取氣壓計(jì)數(shù)據(jù)
如何使用e2studio對瑞薩單片機(jī)進(jìn)行GPIO輸出






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論