") 什么是無(wú)人叉車系統(tǒng)解決方案 包含哪些功能和組成部分 怎么協(xié)作的
什么是無(wú)人叉車系統(tǒng)解決方案 包含哪些功能和組成部分 怎么協(xié)作的
一套無(wú)人叉車系統(tǒng)解決方案通常包含多個(gè)關(guān)鍵部分,這些部分協(xié)同工作以實(shí)現(xiàn)自動(dòng)化、智能化的物料搬運(yùn)。以下是從操作終端、業(yè)務(wù)系統(tǒng)、管理系統(tǒng)、執(zhí)行設(shè)備和固定設(shè)備等方面進(jìn)行的詳細(xì)闡釋:

一、操作終端 人機(jī)交互界面:無(wú)人叉車系統(tǒng)通常配備有直觀易用的操作終端或人機(jī)交互界面(HMI),用于操作人員與系統(tǒng)進(jìn)行交互。這些界面可以顯示實(shí)時(shí)運(yùn)行狀態(tài)、任務(wù)進(jìn)度、錯(cuò)誤信息等重要信息,并允許操作人員對(duì)系統(tǒng)進(jìn)行監(jiān)控和控制。

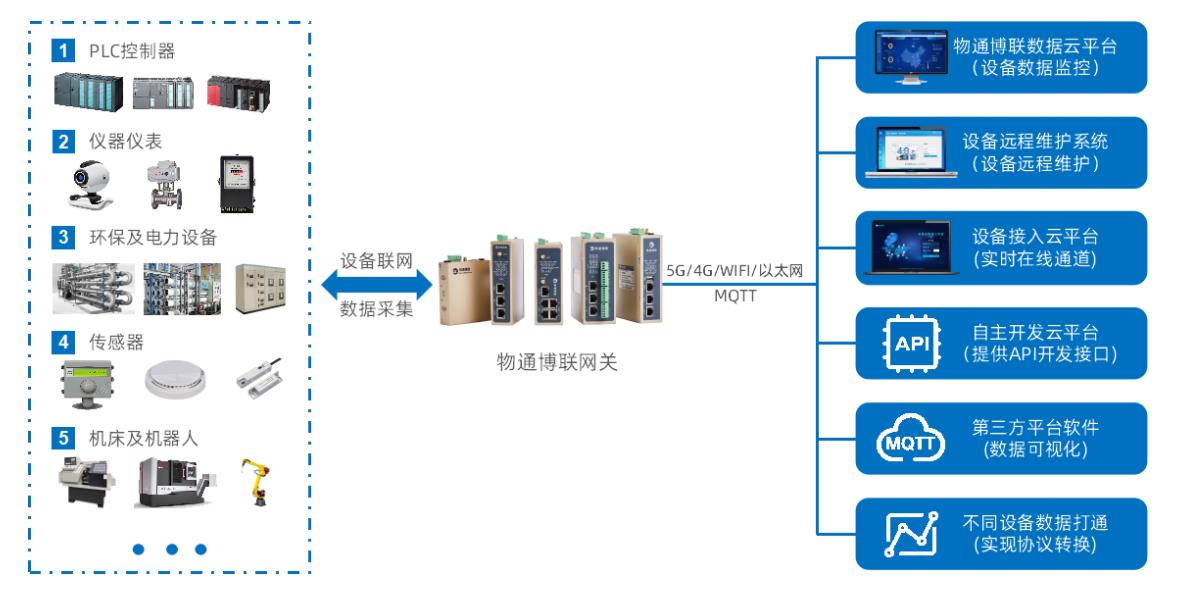
二、業(yè)務(wù)系統(tǒng) 業(yè)務(wù)集成:無(wú)人叉車系統(tǒng)需要與企業(yè)的現(xiàn)有業(yè)務(wù)系統(tǒng)(如ERP、MES等)進(jìn)行集成,以實(shí)現(xiàn)訂單信息的自動(dòng)接收、處理和執(zhí)行。通過(guò)API接口或數(shù)據(jù)交換平臺(tái),系統(tǒng)能夠?qū)崟r(shí)獲取生產(chǎn)任務(wù)、物料需求等信息,并據(jù)此規(guī)劃搬運(yùn)路徑和任務(wù)。
三、管理系統(tǒng) WMS倉(cāng)儲(chǔ)管理系統(tǒng):倉(cāng)儲(chǔ)管理系統(tǒng)(WMS)是無(wú)人叉車系統(tǒng)的核心管理部分,負(fù)責(zé)倉(cāng)庫(kù)內(nèi)物料的入庫(kù)、存儲(chǔ)、出庫(kù)等全流程管理。WMS能夠?qū)崟r(shí)更新庫(kù)存信息、監(jiān)控物料位置、優(yōu)化存儲(chǔ)空間利用等。
WCS設(shè)備控制系統(tǒng):設(shè)備控制系統(tǒng)(WCS)負(fù)責(zé)無(wú)人叉車的具體控制和調(diào)度。它接收來(lái)自WMS的任務(wù)指令,根據(jù)倉(cāng)庫(kù)布局、物料位置等信息規(guī)劃搬運(yùn)路徑,并向無(wú)人叉車發(fā)送控制指令。WCS還需要實(shí)時(shí)監(jiān)控?zé)o人叉車的運(yùn)行狀態(tài)和位置信息,確保任務(wù)執(zhí)行的準(zhǔn)確性和安全性。
RCS智能調(diào)度系統(tǒng):智能調(diào)度系統(tǒng)(RCS)在無(wú)人叉車系統(tǒng)中起到統(tǒng)籌協(xié)調(diào)的作用。它能夠根據(jù)倉(cāng)庫(kù)的實(shí)時(shí)情況和任務(wù)需求,對(duì)多臺(tái)無(wú)人叉車進(jìn)行智能調(diào)度和路徑規(guī)劃,以實(shí)現(xiàn)最優(yōu)的搬運(yùn)效率和資源利用。
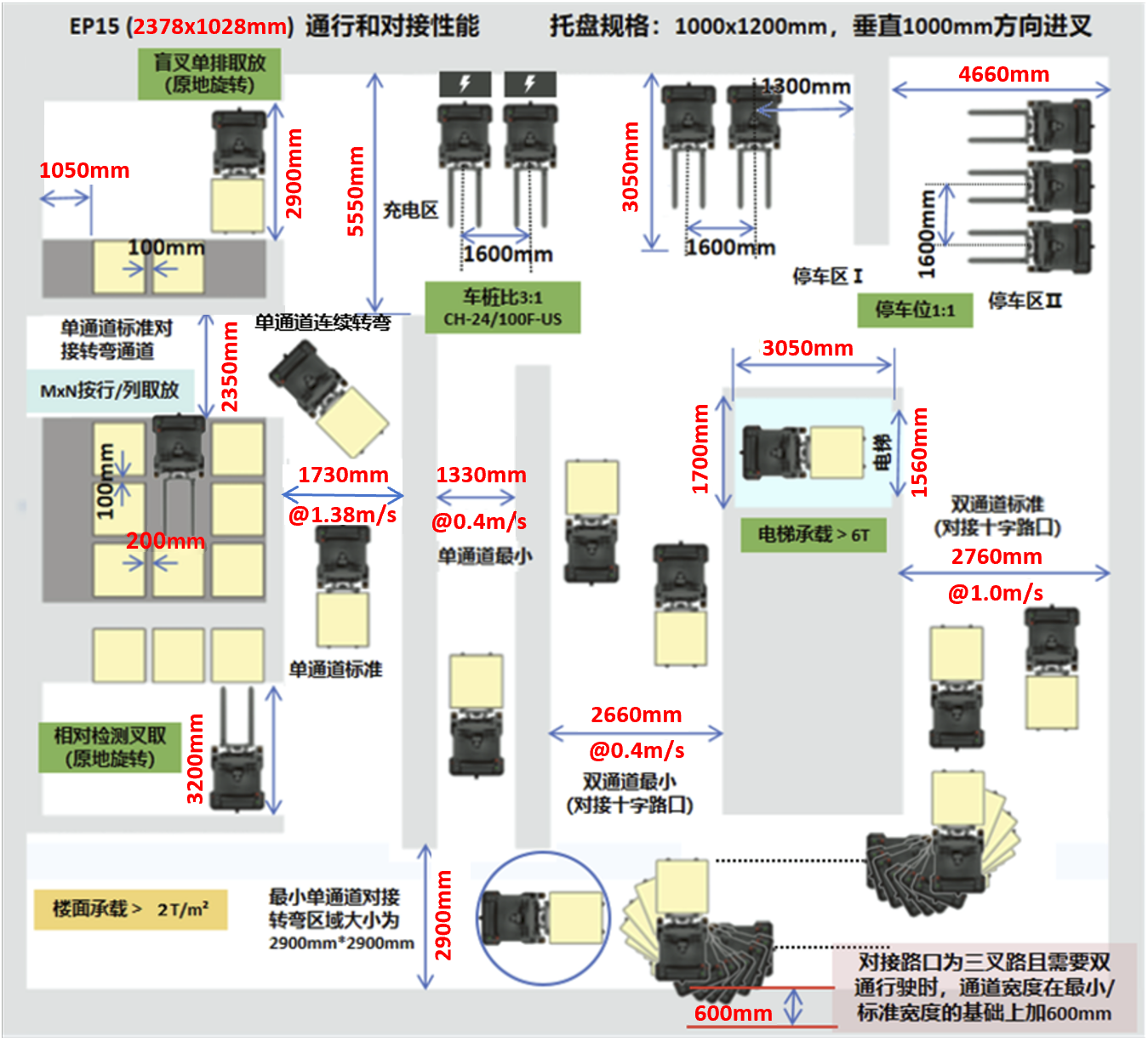
四、執(zhí)行設(shè)備 無(wú)人叉車:無(wú)人叉車是執(zhí)行物料搬運(yùn)任務(wù)的主體設(shè)備。它根據(jù)WCS的控制指令進(jìn)行自動(dòng)行駛、叉取和放置物料等操作。無(wú)人叉車通常配備有先進(jìn)的導(dǎo)航技術(shù)(如激光導(dǎo)航、視覺(jué)導(dǎo)航等)和傳感器(如激光雷達(dá)、攝像頭等),以確保在復(fù)雜環(huán)境中的精確導(dǎo)航和避障。
五、固定設(shè)備
導(dǎo)航定位設(shè)施:如激光反射板、二維碼標(biāo)簽等,用于為無(wú)人叉車提供導(dǎo)航和定位信息。這些設(shè)施需要根據(jù)倉(cāng)庫(kù)布局和實(shí)際需求進(jìn)行精確布置和安裝。 充電設(shè)施:無(wú)人叉車需要定期進(jìn)行充電以維持其運(yùn)行。
因此,充電設(shè)施(如充電樁、充電站等)也是無(wú)人叉車系統(tǒng)解決方案中的重要組成部分。這些設(shè)施需要方便無(wú)人叉車自主對(duì)接和充電,并確保充電過(guò)程的安全和高效。
綜上所述,一套無(wú)人叉車系統(tǒng)解決方案包含了操作終端、業(yè)務(wù)系統(tǒng)、管理系統(tǒng)、執(zhí)行設(shè)備和固定設(shè)備等多個(gè)部分。這些部分共同協(xié)作,實(shí)現(xiàn)了物料搬運(yùn)的自動(dòng)化和智能化,提高了企業(yè)的生產(chǎn)效率和物流管理水平。需要注意的是,不同廠商提供的無(wú)人叉車系統(tǒng)解決方案可能在具體實(shí)現(xiàn)細(xì)節(jié)上有所不同,但整體框架和核心功能通常是一致的。
審核編輯 黃宇
-
RCS
+關(guān)注
關(guān)注
0文章
57瀏覽量
12933 -
WMS
+關(guān)注
關(guān)注
1文章
110瀏覽量
5777
發(fā)布評(píng)論請(qǐng)先 登錄
盤(pán)點(diǎn)無(wú)人叉車的常見(jiàn)車型,你都認(rèn)識(shí)哪些?

無(wú)人駕駛解決方案包含哪些方面?感知、決策與控制

聯(lián)核科技AGV無(wú)人叉車有哪些安全防護(hù)措施?

AGV無(wú)人叉車在夜間可以行駛嗎?是什么原理?
AGV無(wú)人叉車常見(jiàn)的使用誤區(qū) 你知道幾個(gè)?
無(wú)人AGV叉車是怎么判斷貨物位置的?建議收藏

一文了解無(wú)人叉車的軟件系統(tǒng)構(gòu)成

無(wú)人叉車的工作原理是什么?一鍵收藏
工業(yè)物聯(lián)網(wǎng)系統(tǒng)的組成部分
物聯(lián)網(wǎng)泵房的功能和組成部分
企業(yè)買無(wú)人叉車要注意 沒(méi)有這7個(gè)功能的agv 再便宜都不要買






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論