 M-G370/M-G365可應用于AGV搬運機器人,AGV小車的慣性測量單元IMU
M-G370/M-G365可應用于AGV搬運機器人,AGV小車的慣性測量單元IMU

今天來介紹可適用于AGV搬運機器人,AGV物流小車的愛普生慣性測量單元IMU:M-G365,M-G370。通常情況下,物料的裝卸搬運是在物流過程中發生頻率高、耗用時間長的作業活動。為了降低成本并提高效率,自動搬運技術的實施勢在必行,因此受到越來越多的關注。在眾多的搬運技術中,因為AGV搬運機器人,AGV物流小車的高效率,使其成為實現物料自動搬運的利器。那么怎么選擇AGV搬運機器人,AGV物流小車呢?AGV小車中的慣性導航模塊(簡稱:慣導模塊)又對AGV搬運機器人起到什么作用呢?
AGV搬運機器人作為物流裝備中自動化水平較高的產品,越來越多地應用于倉儲、制造、醫療等多個行業領域。相比傳統的人工搬運方式,AGV搬運機器人在不需要人工駕駛的情況下就能夠沿預定的路線自動行駛,將貨物或物料自動從起始點運送到目的地。自動化倉儲行業通過采用AGV物流小車,替代了傳統的用人工驅動小車的貨物運輸工作,改善了工人的工作環境條件,提高了自動化生產水平,有效地解放了勞動生產力,減輕了勞動強度,同時促進了企業人員素質與管理水平的提高。
AGV搬運機器人,AGV物流小車的調度控制系統是實現其自動化的關鍵,即對AGV進行準確調度,確保多個AGV能同時有序、規范作業。通俗地說,AGV控制系統需要解決三個主要問題:我在哪里?我要去哪里?我怎么去?歸納起來分別就是AGV控制系統中的三個主要技術:導航、路徑規劃、導引控制。
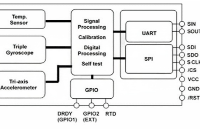
AGV搬運機器人,AGV物流小車的導航問題。AGV小車中的慣性導航模塊(簡稱:慣導模塊)是一種不依賴于外部信息、不易受到干擾的自主式導航系統。慣導模塊通過測量載體在慣性參考系的加速度,自動進行積分運算,獲得載體的瞬時速度和瞬時位置數據,且把它變換到導航坐標系中,從而得到在導航坐標系中的速度、偏航角和位置等信息。AGV小車中的慣性導航模塊(簡稱:慣導模塊)優點在于給定了初始條件后,AGV小車不需要外部參照就可確定當前位置、方向及速度。適用于各種復雜地理環境和外界干擾下的精準定位和定向,且能不斷測量位置的變化,保持動態姿態基準。而愛普生的慣導模塊M-G365,M-G370就可以應用于AGV搬運機器人,AGV物流小車中,M-G365是一款性能達到光纖陀螺儀(FOG)級別的高性能慣性測量裝置,具有姿態角輸出功能并支持各種應用,并且具有擴展卡爾曼濾波器的高速DSP能以較低功耗提供高精度實時姿態角輸出(橫滾角/俯仰角/偏航角),可廣泛適用于汽車等車輛、船只及其他多種工業產品和系統,用來測量數據和控制運動等,而且系統端不再需要動態姿態角的高速計算,從而減小了系統載荷和功耗。高精度慣導模塊M-G365采用了高性能傳感器,具有穩定性更好、噪音更低、動態范圍更廣的特點,而且動態性能出色(比例因子非線性)。而高精度慣導模塊M-G370新開發的加速度計也大大提高了零偏穩定性(達到6 uG),初始零偏誤差為2mg (1σ)。搭載新開發的陀螺傳感器,極大提高了零偏穩定性(0.8°/小時),廣泛應用于慣性導航和對位置測量精度要求高的領域,如自主駕駛、無人駕駛等領域。愛普生的慣性導航模塊(簡稱:慣導模塊)M-G365,M-G370應用在AGV搬運機器人、AGV物流小車中,大大提高了物流行業自動化搬運水平。
-
機器人
+關注
關注
212文章
29421瀏覽量
211266 -
AGV
+關注
關注
27文章
1428瀏覽量
41923 -
IMU
+關注
關注
6文章
337瀏覽量
46442
發布評論請先 登錄
AGV搬運機器人耗電量因素
愛普生慣性測量單元M-G370PDF可廣泛用于各工業領域

EPSON慣性測量單元M-G370PDF用于管道機器人巡檢
愛普生M-G365PDC1/M-G365PDF1六軸陀螺儀

agv搬運機器人是怎么實現無人搬運的?

愛普生M-G370PDT0(X2G000221000200)慣性測量模塊

智能時代小巨人:地牛AGV搬運機器人

愛普生(EPSON) 慣性測量單元(IMU)、陀螺儀傳感器等模塊應用領域選型介紹

M-G330PDG慣性測量單元:精準控制與智能應用的核心

適合多種苛刻環境的慣性測量單元M-G370PDS

高速率控制應用下的汽車導航——M-G365/M-G366






 工商網監
工商網監
評論