") 伺服正負(fù)脈沖方向控制怎么調(diào)
伺服正負(fù)脈沖方向控制怎么調(diào)
伺服電機(jī)是一種高精度、高響應(yīng)速度的電機(jī),廣泛應(yīng)用于自動化設(shè)備、機(jī)器人、數(shù)控機(jī)床等領(lǐng)域。伺服電機(jī)的控制方式有很多種,其中正負(fù)脈沖方向控制是一種常見的控制方式,通過控制脈沖的正負(fù)來實(shí)現(xiàn)電機(jī)的正反轉(zhuǎn)控制。
- 伺服電機(jī)的基本原理
伺服電機(jī)是一種將電信號轉(zhuǎn)換為機(jī)械運(yùn)動的裝置,其基本原理是利用電磁感應(yīng)原理,將電能轉(zhuǎn)換為機(jī)械能。伺服電機(jī)主要由定子、轉(zhuǎn)子、編碼器等部分組成。定子是電機(jī)的固定部分,轉(zhuǎn)子是電機(jī)的旋轉(zhuǎn)部分,編碼器用于檢測電機(jī)的轉(zhuǎn)速和位置。
伺服電機(jī)的控制方式有很多種,如模擬信號控制、脈沖控制、總線控制等。其中,脈沖控制是一種常見的控制方式,通過控制脈沖的數(shù)量、頻率和方向來實(shí)現(xiàn)電機(jī)的轉(zhuǎn)速和轉(zhuǎn)向控制。
- 伺服正負(fù)脈沖方向控制的原理
伺服正負(fù)脈沖方向控制的原理是利用脈沖信號的正負(fù)來控制電機(jī)的轉(zhuǎn)向。當(dāng)輸入正脈沖信號時(shí),電機(jī)正轉(zhuǎn);當(dāng)輸入負(fù)脈沖信號時(shí),電機(jī)反轉(zhuǎn)。正負(fù)脈沖信號可以通過硬件電路實(shí)現(xiàn),也可以通過軟件編程實(shí)現(xiàn)。
- 伺服正負(fù)脈沖方向控制的硬件實(shí)現(xiàn)
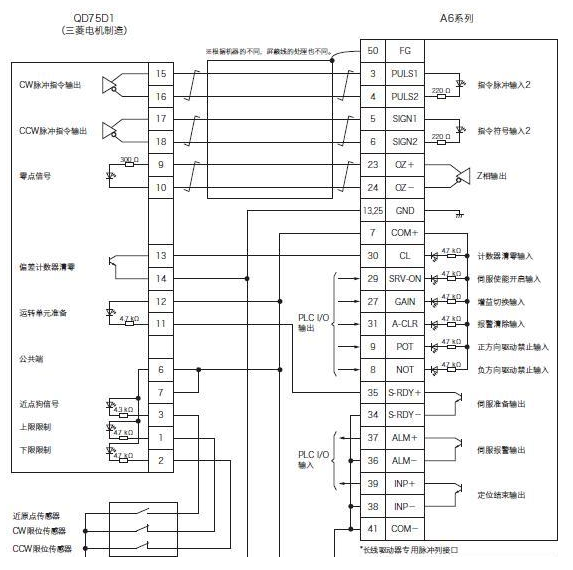
伺服正負(fù)脈沖方向控制的硬件實(shí)現(xiàn)主要包括脈沖信號的產(chǎn)生、放大、整形等環(huán)節(jié)。具體實(shí)現(xiàn)步驟如下:
(1)脈沖信號的產(chǎn)生
脈沖信號可以通過多種方式產(chǎn)生,如使用定時(shí)器、計(jì)數(shù)器、編碼器等。在實(shí)際應(yīng)用中,通常使用PLC或單片機(jī)等控制器來產(chǎn)生脈沖信號。
(2)脈沖信號的放大
由于伺服電機(jī)的驅(qū)動電路需要較大的電流,因此需要對脈沖信號進(jìn)行放大。脈沖信號放大器可以采用晶體管、MOSFET等功率器件實(shí)現(xiàn)。
(3)脈沖信號的整形
脈沖信號在傳輸過程中可能會受到干擾,導(dǎo)致信號波形失真。為了確保信號的穩(wěn)定性和可靠性,需要對脈沖信號進(jìn)行整形。脈沖信號整形器可以采用施密特觸發(fā)器、比較器等電路實(shí)現(xiàn)。
- 伺服正負(fù)脈沖方向控制的軟件實(shí)現(xiàn)
伺服正負(fù)脈沖方向控制的軟件實(shí)現(xiàn)主要包括脈沖信號的生成、控制邏輯的編寫、通信協(xié)議的配置等環(huán)節(jié)。具體實(shí)現(xiàn)步驟如下:
(1)脈沖信號的生成
在軟件中生成脈沖信號,可以通過定時(shí)器、計(jì)數(shù)器等硬件資源實(shí)現(xiàn),也可以通過軟件編程實(shí)現(xiàn)。在實(shí)際應(yīng)用中,通常使用PLC或單片機(jī)等控制器的編程軟件來生成脈沖信號。
(2)控制邏輯的編寫
控制邏輯是實(shí)現(xiàn)伺服正負(fù)脈沖方向控制的核心部分。根據(jù)實(shí)際應(yīng)用需求,編寫相應(yīng)的控制邏輯,如正反轉(zhuǎn)控制、速度控制、位置控制等。控制邏輯的編寫需要考慮電機(jī)的動態(tài)特性、負(fù)載特性等因素。
(3)通信協(xié)議的配置
伺服電機(jī)通常采用通信協(xié)議與控制器進(jìn)行通信,如RS-232、RS-485、CAN等。在軟件中配置通信協(xié)議,可以實(shí)現(xiàn)對伺服電機(jī)的遠(yuǎn)程控制和監(jiān)控。
- 伺服正負(fù)脈沖方向控制的應(yīng)用實(shí)例
伺服正負(fù)脈沖方向控制在很多領(lǐng)域都有應(yīng)用,如自動化設(shè)備、機(jī)器人、數(shù)控機(jī)床等。下面以數(shù)控機(jī)床為例,介紹伺服正負(fù)脈沖方向控制的應(yīng)用。
在數(shù)控機(jī)床中,伺服電機(jī)用于控制機(jī)床的各個(gè)軸的移動。通過控制脈沖的正負(fù),可以實(shí)現(xiàn)軸的正反轉(zhuǎn)控制,從而實(shí)現(xiàn)機(jī)床的加工過程。具體實(shí)現(xiàn)步驟如下:
(1)根據(jù)數(shù)控程序,確定各個(gè)軸的移動方向和速度。
(2)根據(jù)軸的移動方向和速度,生成相應(yīng)的脈沖信號。
(3)將脈沖信號發(fā)送給伺服電機(jī)的驅(qū)動器。
(4)伺服電機(jī)根據(jù)接收到的脈沖信號,實(shí)現(xiàn)軸的正反轉(zhuǎn)控制。
(5)通過編碼器檢測軸的實(shí)際位置和速度,實(shí)現(xiàn)閉環(huán)控制。
- 結(jié)論
伺服正負(fù)脈沖方向控制是一種常見的伺服電機(jī)控制方式,具有控制精度高、響應(yīng)速度快等優(yōu)點(diǎn)。在實(shí)際應(yīng)用中,需要根據(jù)具體需求選擇合適的硬件和軟件實(shí)現(xiàn)方式。通過合理的控制策略和通信協(xié)議配置,可以實(shí)現(xiàn)對伺服電機(jī)的高效、穩(wěn)定控制。
-
脈沖
+關(guān)注
關(guān)注
20文章
901瀏覽量
96733 -
伺服電機(jī)
+關(guān)注
關(guān)注
87文章
2100瀏覽量
59136 -
數(shù)控機(jī)床
+關(guān)注
關(guān)注
19文章
814瀏覽量
47694 -
自動化設(shè)備
+關(guān)注
關(guān)注
1文章
465瀏覽量
17238
發(fā)布評論請先 登錄
STM32伺服電機(jī) 指令脈沖+方向位置控制模式相關(guān)資料推薦
如何利用伺服電機(jī)的指令脈沖加方向位置控制模式實(shí)現(xiàn)精確位置控制?
伺服系統(tǒng)脈沖控制電路
PLC使用脈沖方式控制伺服電機(jī)
伺服如何實(shí)現(xiàn)脈沖控制及優(yōu)缺點(diǎn)

如何使用IC555控制伺服電機(jī)的方向





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論