 智能垃圾回收箱控制系統硬件設計
智能垃圾回收箱控制系統硬件設計
控制系統硬件部分的選型與設計是整個產品的基礎,所有功能的實現都要圍繞其進行開發。本章對智能垃圾回收箱控制系統的硬件進行詳細設計。
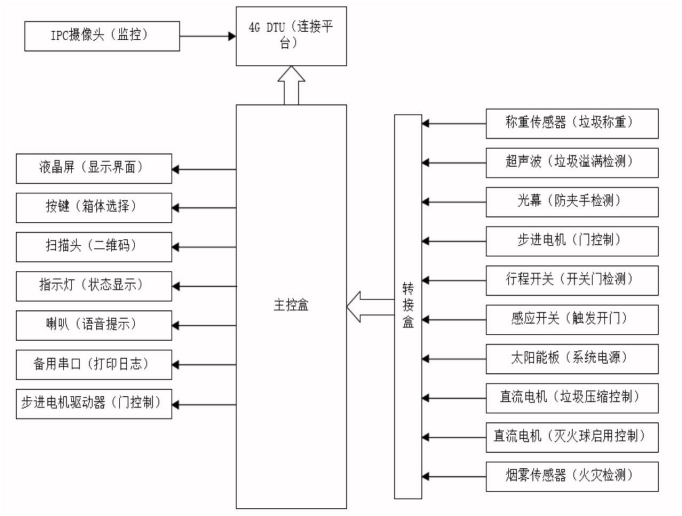
智能垃圾回收箱運行時,通過掃描模塊進行身份識別;身份驗證后,控制器啟動電機打開回收門,持續開啟 7 秒;用戶投放垃圾后,回收門自動關閉。
超聲波模塊檢測桶內垃圾容量,超過設定值時,控制器發出清理提示。垃圾進入回收箱后,系統稱重記錄并上傳至云端,轉換為積分存入用戶賬戶,可用于兌換日常用品。回收箱具備防火功能,煙霧傳感器監測空氣質量,高濃度煙霧時發出警報并啟動滅火球。
01
智能垃圾回收箱傳感器選型
智能垃圾回收箱傳感器的主要作用是實現系統的稱重、防滿溢、安全保護及防火等功能。
02
稱重傳感器模塊
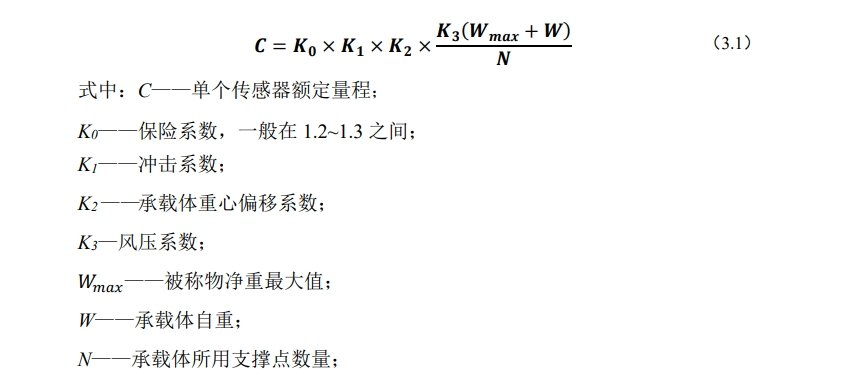
稱重傳感器是稱重系統的關鍵部件,放置在箱體底部。其精準性和穩定性是衡量它優劣的決定性因素。選擇稱重傳感器時,要考慮其量程、精度以及輸出形式。量程大小需要考慮多方條件。
03
超聲波傳感器模塊
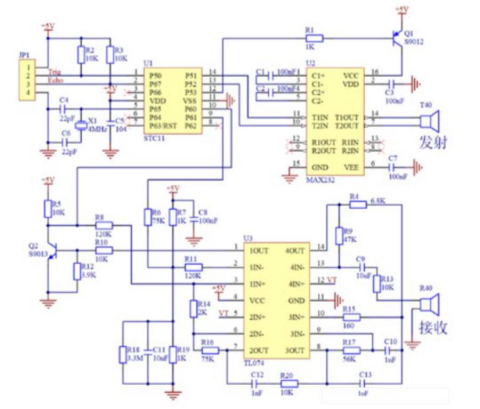
超聲波傳感器模塊用于智能垃圾回收箱容量的檢測。考慮到使用的方便性和檢測的及時性,本文選用非接觸式的超聲波測距模塊對桶內垃圾容量進行測量。超聲波具有高頻率、短波長、方向性好的特點,工作時不受光線干擾,其抗干擾性和定位精度較強,在方便快捷的同時精度也能滿足需求。經過調研,智能垃圾回收箱采用 HC-SR04 超聲波傳感器模塊,詳細參數如表所示

04
將超聲波傳感器安裝在垃圾桶正上方,根據超聲波傳播時間計算得到智能垃圾回收箱頂部與垃圾的距離數據,用智能垃圾回收箱頂部到桶底的距離減去該數值即為垃圾桶的容量。為了防止垃圾滿溢,在設計時設置閥值,若傳感器檢測到垃圾桶容量超過該閥值,回收門無法啟動,同時上傳垃圾滿溢信息提示工作人員清理垃圾桶,等到箱體內部清空后,智能垃圾回收箱投放功能再次開啟。
05
光幕傳感器智能垃圾回收箱使用鋼材制造,為防止用戶投放垃圾時被投放門誤傷,本文采用光幕傳感器進行檢測,避免發生安全事故。光幕傳感器運用紅外線掃描探測技術,讓紅外線在高速掃描情況下形成紅外線光幕,當光幕被遮擋時,光幕傳感器發出遮光信號,控制回收門停止工作,保證用戶安全。本設計選用 BX87OJS25-16 安全光幕傳感器,具體參數見表 。
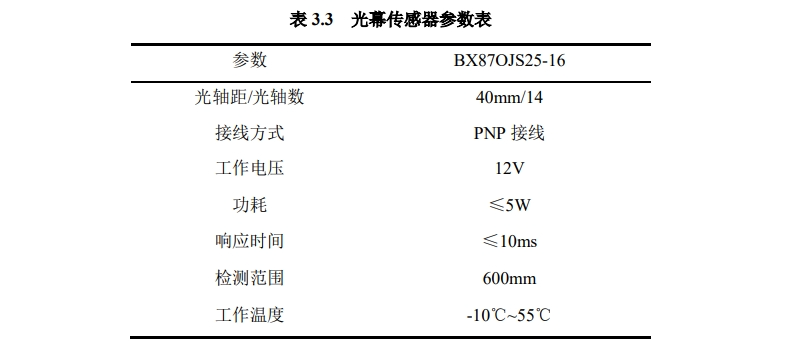
將光幕傳感器固定在回收箱頂部,光幕的一邊發射多條紅外線,另一邊接受紅外線形成光幕,光幕傳感器的輸出通過控制器驅動回收門控制系統。如果紅外線發射端和接收端中間無障礙,接收端在收到光信號后輸出低電平,此時回收門控制系統正常運作;如果用戶將手伸入光幕內(如圖 3.4),接收端收不到信號,內部電路輸出高電平,此時正在關閉的回收門重新打開,從而保護用戶的安全。
01
煙霧傳感器模塊
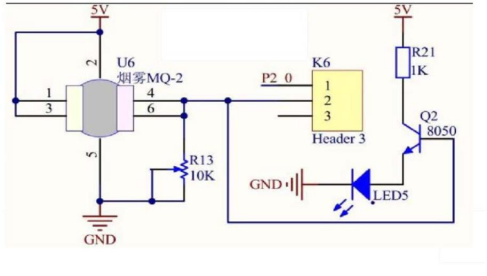
為了防止在密閉環境下發生火災,智能垃圾回收箱中設計了 MQ-2 型煙霧傳感器(如圖 3.5 所示),該傳感器屬于表面離子式半導體,工作穩定、靈敏度高、響應快,對于有刺激性非可燃性煙霧的干擾有著良好的抵抗性,被廣泛應用于消防系統。
02
MQ-2 的電路圖如圖 3.6 所示,將其連接在 5V 電源上,當箱體內部產生煙霧時,傳感器與其接觸會引發表面導電率的變化,煙霧越濃導電率越大,輸出的信號就越大。當煙霧濃度較高輸出高于預定電壓時,信號為低電平,LED 亮并報警,同時滅火球裝置啟動進行滅火處理。
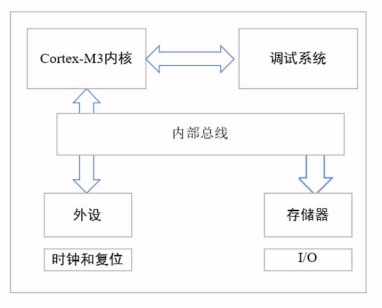
智能垃圾回收箱主控制器模塊主控制器是整個硬件系統的核心,為了能夠更好地實現產品功能,選用低功耗、高性能的控制芯片至關重要。目前市場上單片機類型繁多,在考慮 51 單片機、PLC、AVR 單片機以及 STM 單片機后,主控制器選用 STM32 單片機。STM32 單片機接口豐富,性能好、成本低,除了具有高度集成和易開發的優點外,其獨有的 ARM Cortex-M[48]設計也使其能更穩定的工作。
目前市場中常見的顯示屏主要有 LED、LCD、OLED 等三種顯示屏,其中 LED顯示屏因屏幕太大不在本設計考慮范圍;LCD 使用液晶材料,功耗低、像素集成度高,被廣泛應用于電子設備;而 OLED 顯示屏像素集成度高、更輕、響應更快,性能最好,但考慮到經濟性,在不影響使用功能情況下選擇 5 寸(800×480 像素)的 LCD電容式液晶屏作為顯示器。STM32 控制器配置有 FSMC 總線可以直接連接 LCD,對LCD 顯示屏進行管理。
用戶可通過顯示屏上的提示步驟,選擇相應的回收門進行垃圾投放,投放結束后,顯示屏上會顯示本次投放垃圾的重量并提示用戶本次操作結束。3.4.2 掃描模塊為了能夠快速驗證客戶身份,本文的設計采用“一戶一碼”方案,即每家用戶通過二維碼綁定身份,智能垃圾回收箱上配置一款合適的掃描頭模塊,在使用時掃描二維碼即可。選用興通 XT2003C 二維碼掃描模塊,可以讀取各類介質的一維碼、二維碼,如紙質、標簽、手機屏幕等。
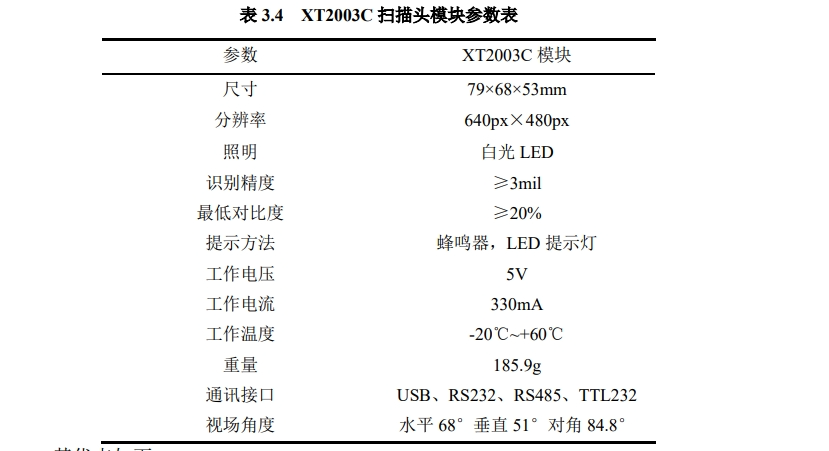
其優點如下:(1)機身耐用,結構穩定,可嵌入各類設備;(2)操作簡單,掃描速度快,掃描精度高、掃描靈敏,大大的提高了用戶使用體驗;(3)自帶補光能力,保證產品在各種無光情況下也能正常使用,并且可以根據物品遠近自動調節燈光亮度;(4)接口豐富,包含 USB/TTL/RS232 等多種接口,適用于多種設備;(5)可掃描各類一維碼、二維碼及手機屏幕支付碼,符合本設計需求;(6)全局曝光掃碼速度快,采用 32 位 CPU,運算速度快,掃描靈敏度高;
回收門控制裝置設計
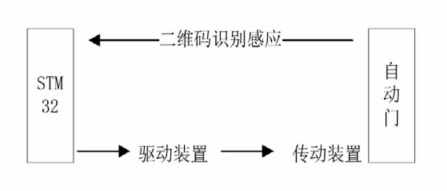
智能垃圾回收箱的回收門采用自動化控制,回收門的自動工作原理如圖 3.10 所示,當用戶觸發感應開關時,控制器下達開/關指令給驅動裝置,驅動部分帶動傳動機構控制門的開關。
自動門的控制要求如下:
(1)當用戶選擇智能垃圾回收箱進行投放時,傳動機構執行命令,電機正轉,到達開門限位開關位置電機停止;
(2)回收門開啟等待 7 秒后開始關閉,電機反轉,到達關門限位開關,電機停止;
(3)回收門開啟時間內,如果有物品進出,系統將重新等待,直至 7 秒內無物品感應;回收門才再次關閉,確保用戶人身安全;
(4)開關門過程中,電機速度從 0 開始加速到最高速度 v,短時間后開始減速最后以超低速運動到停止位,減少門框碰撞。根據系統設計要求,采用步進電機和行程開關來實現自動開關門功能。其中步進電機用于控制回收門的啟閉,按下按鍵,步進電機啟動帶動回收門開啟;
行程開關,又稱限位開關,本文選擇滾輪式 LX19-001/111 行程開關,負責限制回收門運動位置,確保電機控制的自動門到達一定位置后自動停止。步進電機在選擇時需要考慮其步距角以及扭矩,步距角越小平穩性越好。
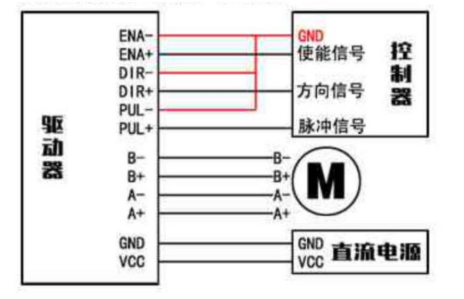
通過對電機扭矩以及轉速公式的分析,采用驅動器型號為 TB6600 的 42BYGH34型步進電機(如圖 3.11 連接),體積小,噪音低,具體參數見表
電源模塊為控制器、傳感器模塊、電機部分提供穩定電源。不同的模塊對于與電源電壓的要求也不盡相同,大多數采用 3.3V 電壓,部分模塊采用 5V 和 12V 電壓。系統采用的主控制器、超聲波傳感器、GPS 定位使用 3.3V 電源電壓,稱重傳感器、煙霧傳感器、顯示器和掃描模塊使用 5V 電壓,光幕傳感器、通信模塊和監控模塊使用 12V 電壓,電機使用 24V 電壓。
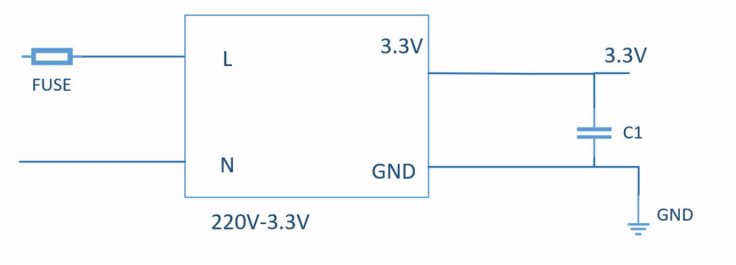
所以針對不同電壓需求設計電源電平轉換電路。本設計采用市電作為外接電源,使用 AP24N03-Zero AC/DC 模塊,將 220V 交流電轉為 24V 直流電以供直流電機運行,設計圖如圖 3.12,其中,FUSE 是限流 1A 的保險絲。
小結
本文主要研究了智能垃圾回收箱控制系統硬件,采用STM32單片機作為主控制器,并選擇了適用于硬件系統的傳感器。論述了智能垃圾回收箱的功能實現方法。在箱門中設計了光幕傳感器,與防夾手機構聯合發揮作用,提高了垃圾投放的安全性。
-
控制系統
+關注
關注
41文章
6752瀏覽量
111781 -
硬件
+關注
關注
11文章
3459瀏覽量
67178 -
智能垃圾桶
+關注
關注
3文章
53瀏覽量
10803
發布評論請先 登錄
智能可回收箱:引領垃圾分類新潮流,推動城市環保與資源循環利用發展

智能電動輪椅控制系統的研究與設計
智能垃圾投放站遠程監控智慧運維系統方案
DCS控制系統的配置與實施流程
工廠照明智能控制系統
日光溫室智能控制系統
溫室大棚智能灌溉控制系統
雞舍環境智能控制系統

智能路燈遠程控制系統
亮鉆科技智能垃圾分類箱方案介紹






 工商網監
工商網監
評論