") 小于50ms!IEEE'24最新,高效低延遲UVA檢測(cè)系統(tǒng)!
小于50ms!IEEE'24最新,高效低延遲UVA檢測(cè)系統(tǒng)!
0.這篇文章干了啥?
這篇文章介紹了一種名為F-UAV-D的嵌入式系統(tǒng),旨在利用事件到幀輸入來檢測(cè)無人機(jī)。文章首先介紹了無人機(jī)在各種領(lǐng)域中的應(yīng)用,并指出了對(duì)于保護(hù)隱私和安全,對(duì)無人機(jī)進(jìn)行預(yù)防和檢測(cè)至關(guān)重要的重要性。然后,文章討論了目前用于無人機(jī)檢測(cè)的兩種主要方法:主動(dòng)掃描和被動(dòng)掃描。接著,文章介紹了動(dòng)態(tài)視覺傳感器(DVS)作為一種替代方案,其利用時(shí)間戳像素級(jí)亮度變化,適應(yīng)于低延遲的對(duì)象檢測(cè)。隨后,文章提出了F-UAV-D系統(tǒng),它利用DVS作為實(shí)時(shí)低功耗配置中的RGB攝像頭的替代方案,并展示了該系統(tǒng)的性能優(yōu)勢(shì)。最后,文章總結(jié)了實(shí)驗(yàn)結(jié)果,并提出了未來工作的計(jì)劃,包括擴(kuò)展數(shù)據(jù)集、深入研究提出的設(shè)置以及嘗試不同的神經(jīng)網(wǎng)絡(luò)架構(gòu)。
下面一起來閱讀一下這項(xiàng)工作~
1. 論文信息
論文題目:Towards Real-Time Fast Unmanned Aerial Vehicle Detection Using Dynamic Vision Sensors
作者:Jakub Mandula, Jonas K¨uhne等
作者機(jī)構(gòu):瑞士蘇黎世聯(lián)邦理工學(xué)院
論文鏈接:https://arxiv.org/pdf/2403.11875.pdf
2. 摘要
無人機(jī)(Unmanned Aerial Vehicles, UAVs)在民用和軍事應(yīng)用中越來越受歡迎。然而,對(duì)受限區(qū)域的未經(jīng)控制的訪問威脅到隱私和安全。因此,預(yù)防和檢測(cè)無人機(jī)對(duì)于保證機(jī)密性和安全至關(guān)重要。盡管主要基于雷達(dá)的主動(dòng)掃描是最精確的技術(shù)之一,但它可能比被動(dòng)檢查,例如對(duì)象識(shí)別,更昂貴且不太靈活。動(dòng)態(tài)視覺傳感器(Dynamic Vision Sensors, DVS)是一種受生物啟發(fā)的基于事件的視覺模型,利用了快速移動(dòng)場(chǎng)景中的時(shí)間戳像素級(jí)亮度變化,很好地適應(yīng)于低延遲目標(biāo)檢測(cè)。本文提出了一種名為F-UAV-D (Fast Unmanned Aerial Vehicle Detector)的嵌入式系統(tǒng),可實(shí)現(xiàn)快速移動(dòng)無人機(jī)的檢測(cè)。具體而言,我們提出了一種利用DVS作為RGB攝像頭的替代方案的設(shè)置,實(shí)現(xiàn)實(shí)時(shí)和低功耗配置。我們的方法利用了DVS的高動(dòng)態(tài)范圍(HDR)和背景抑制,在訓(xùn)練了各種快速移動(dòng)無人機(jī)后,在低照度和快速移動(dòng)場(chǎng)景等次優(yōu)環(huán)境中優(yōu)于RGB輸入。我們的結(jié)果顯示,F(xiàn)-UAV-D可以(i)平均使用<15W的功率檢測(cè)無人機(jī),并且(ii)通過利用邊緣計(jì)算機(jī)的CPU和GPU節(jié)點(diǎn)進(jìn)行實(shí)時(shí)推理(即<50ms)。
3. 效果展示
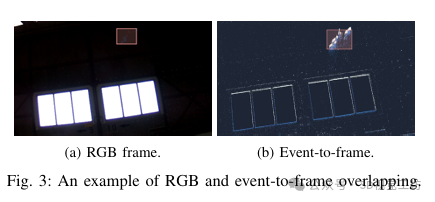
RGB和事件到幀重疊的示例。
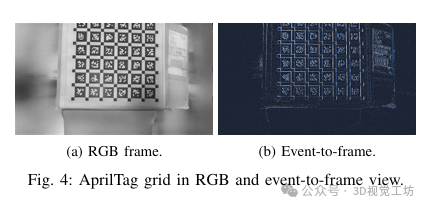
AprilTag 網(wǎng)格在 RGB 和事件到幀視圖中的示例。
4. 主要貢獻(xiàn)
設(shè)計(jì)和開發(fā)用于能效高和低延遲無人機(jī)檢測(cè)的嵌入式系統(tǒng)
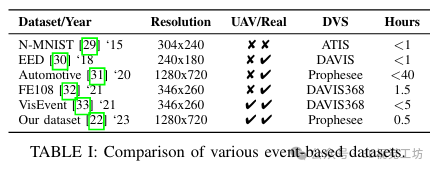
數(shù)據(jù)集收集和地面真實(shí)創(chuàng)建,用于機(jī)器學(xué)習(xí)訓(xùn)練和評(píng)估
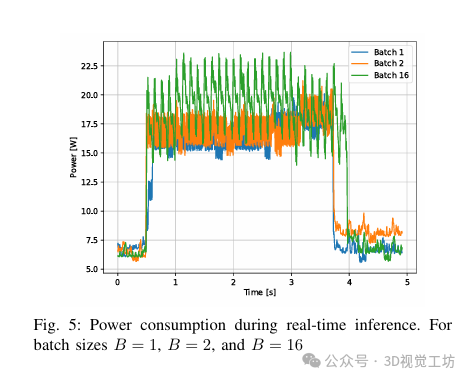
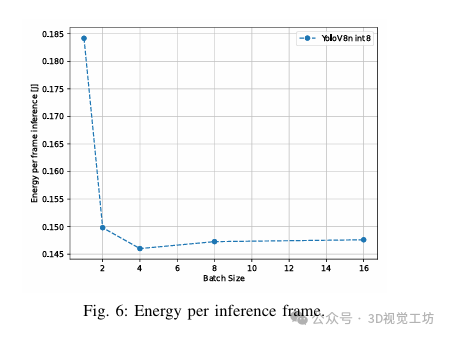
在邊緣不同批大小的YOLOv8的功耗消耗的實(shí)證評(píng)估。
5. 基本原理是啥?
這篇文章的基本原理是利用事件驅(qū)動(dòng)的視覺傳感器(DVS)和傳統(tǒng)的RGB攝像頭相結(jié)合,實(shí)現(xiàn)在邊緣設(shè)備上實(shí)時(shí)檢測(cè)快速移動(dòng)的無人機(jī)。傳統(tǒng)的RGB攝像頭每隔一定時(shí)間(幀率)返回一幀圖像,而DVS則在感知到亮度變化時(shí)立即生成事件,每個(gè)事件包含有關(guān)一個(gè)像素的信息(受到亮度變化影響的像素)以及時(shí)間戳和亮度變化的極性。
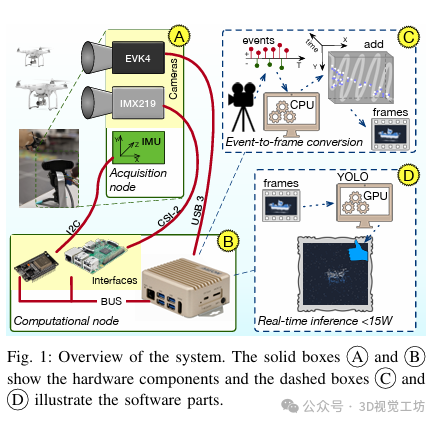
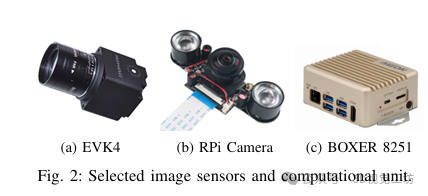
文章介紹了構(gòu)建系統(tǒng)所使用的硬件和軟件設(shè)置。硬件方面,系統(tǒng)基于商用DVS攝像頭、CMOS RGB陣列傳感器和低功耗計(jì)算節(jié)點(diǎn)構(gòu)建。軟件方面,系統(tǒng)基于實(shí)時(shí)目標(biāo)檢測(cè)算法和事件到幀轉(zhuǎn)換的組合。事件到幀轉(zhuǎn)換是一個(gè)關(guān)鍵步驟,將DVS生成的事件流轉(zhuǎn)換為傳統(tǒng)計(jì)算機(jī)視覺算法所需的幀格式。為了實(shí)現(xiàn)這一轉(zhuǎn)換,事件被累積到一個(gè)2D矩陣中,生成人工幀,其中正亮度變化的事件生成白色,負(fù)亮度變化的事件生成藍(lán)色。
在數(shù)據(jù)收集方面,文章介紹了創(chuàng)建一個(gè)包含不同無人機(jī)的公開可用數(shù)據(jù)集的過程。為了標(biāo)記數(shù)據(jù)集,作者使用了YOLO檢測(cè)器對(duì)傳統(tǒng)攝像頭幀進(jìn)行標(biāo)記,并將標(biāo)簽轉(zhuǎn)換為事件相機(jī)幀以用作先驗(yàn)。
最后,文章通過對(duì)系統(tǒng)性能的定量和定性分析,展示了系統(tǒng)在實(shí)時(shí)檢測(cè)無人機(jī)方面的可行性。文章還提出了一個(gè)研究問題,即不同批次大小對(duì)功耗和推斷延遲的影響,為未來的研究提供了方向。
6. 實(shí)驗(yàn)結(jié)果
本文旨在評(píng)估所提出的基于事件的計(jì)算機(jī)視覺算法在低端計(jì)算系統(tǒng)上實(shí)時(shí)檢測(cè)快速移動(dòng)的無人機(jī)的性能。以下是實(shí)驗(yàn)的關(guān)鍵內(nèi)容:
數(shù)據(jù)集收集和標(biāo)記:使用硬件收集數(shù)據(jù)集,并使用Label Studio進(jìn)行標(biāo)記,標(biāo)記人員可以在RGB和DVS輸入同步的情況下檢查兩者之一以進(jìn)行視覺確認(rèn)。
事件到幀轉(zhuǎn)換:DVS生成對(duì)亮度變化的響應(yīng)的事件流,但傳統(tǒng)計(jì)算機(jī)視覺算法支持幀作為輸入。因此,需要將事件流累積以生成人工幀,以便適應(yīng)傳統(tǒng)計(jì)算機(jī)視覺算法。作者采用了一種簡(jiǎn)單的累積過程,將事件聚合成為2色幀,其中白色代表正事件,藍(lán)色代表負(fù)事件。
攝像頭同步和校準(zhǔn):應(yīng)用圖像變換來對(duì)齊RGB和事件到幀的視角,以便手動(dòng)標(biāo)記無人機(jī),并在RGB空間運(yùn)行檢測(cè)器并將標(biāo)簽傳輸?shù)绞录臻g。
數(shù)據(jù)集標(biāo)簽:使用自動(dòng)生成的標(biāo)簽候選項(xiàng),在Label Studio中繪制圍繞目標(biāo)的邊界框,以創(chuàng)建YOLO訓(xùn)練所需的地面真實(shí)數(shù)據(jù)集。
YOLOv5訓(xùn)練:采用YOLOv5-nano算法,將其調(diào)整為接受與事件到幀累積相對(duì)應(yīng)的二維、2通道矩陣,并使用默認(rèn)的訓(xùn)練代理和參數(shù)進(jìn)行訓(xùn)練。
功耗測(cè)量:使用Keysight N6705C DC功率分析儀測(cè)量F-UAV-D在推斷期間的總功耗,發(fā)現(xiàn)批次大小為4時(shí)功耗最低,每幀需求約為146mJ。
7. 總結(jié) & 未來工作
在本文中,我們介紹了F-UAV-D,這是一個(gè)由硬件和軟件組件組成的嵌入式系統(tǒng),可實(shí)現(xiàn)使用事件到幀輸入來檢測(cè)無人機(jī)。我們展示了一個(gè)硬件設(shè)置,包括傳統(tǒng)的RGB攝像頭、新穎的DVS傳感器和低功耗嵌入式系統(tǒng)。我們展示了如何使用現(xiàn)有的機(jī)器學(xué)習(xí)工具如YOLO來自動(dòng)化創(chuàng)建新的事件攝像頭數(shù)據(jù)集的標(biāo)記過程。此外,我們公開提供了我們的數(shù)據(jù)集,其中包括27分鐘的靜止和快速移動(dòng)無人機(jī)錄像(即49,000幀)。我們通過測(cè)量功耗和延遲初步驗(yàn)證了上述數(shù)據(jù)集。所測(cè)得的性能(即0.53 mAP)顯示出了實(shí)時(shí)推斷的現(xiàn)場(chǎng)可部署性,其每幀只需150mJ。我們計(jì)劃通過以下方式擴(kuò)展這項(xiàng)工作:(i)擴(kuò)展數(shù)據(jù)集(例如,包括更具挑戰(zhàn)性的條件)、(ii)對(duì)所提出的設(shè)置進(jìn)行更深入的研究(例如,包括RGB和DVS幀之間的同步和校準(zhǔn)過程的挑戰(zhàn)和限制)、(iii)嘗試不同的神經(jīng)網(wǎng)絡(luò)架構(gòu)。
-
檢測(cè)系統(tǒng)
+關(guān)注
關(guān)注
3文章
972瀏覽量
43707 -
視覺傳感器
+關(guān)注
關(guān)注
3文章
261瀏覽量
23212 -
uva
+關(guān)注
關(guān)注
0文章
11瀏覽量
3454
原文標(biāo)題:小于50ms!IEEE'24最新,高效低延遲UVA檢測(cè)系統(tǒng)!
文章出處:【微信號(hào):3D視覺工坊,微信公眾號(hào):3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
想用TC275的一個(gè)CAN節(jié)點(diǎn)往外發(fā)不同周期(10ms的、20ms的、50ms的)的報(bào)文,如何實(shí)現(xiàn)呢?
調(diào)試程序時(shí)While循環(huán)里的延時(shí)是50ms改為500ms后恢復(fù)正常
如何配置50ms的定時(shí)器中斷
求解答TPS65217C 50ms方波輸出問題!
如何使用LebVIEW寫一個(gè)控制SWITCH板 開50ms之后關(guān),使用板卡內(nèi)部時(shí)鐘?
如何在同一個(gè)定時(shí)器里用50ms和20ms?
請(qǐng)問AD9656是否支持在50MS/s - 125MS/s間的任意采樣率?
一種實(shí)現(xiàn)50ms斷電維持供電的電路設(shè)計(jì)_杜培德
Socionext 推出全新低延遲4K/HEVC編碼器X500E
LTC6994/LTC6993演示電路延遲單次(延遲50ms,單次10ms)

LTC6994 LTC6993演示電路延遲單次(延遲50ms,單次10ms)
50 mA,24-V,3.2μA電源電流,低延遲線性調(diào)節(jié)器TPS71501數(shù)據(jù)表
50 mA,24-V,3.2μA電源電流,低延遲線性調(diào)節(jié)器TPS71501數(shù)據(jù)表
LLSM——基于RK3588的低延遲低帶寬流媒體傳輸模塊






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論