 基于計算設計的超魯棒性應變傳感器,實現軟體機器人的感知和自主性
基于計算設計的超魯棒性應變傳感器,實現軟體機器人的感知和自主性
柔性應變傳感器對軟體機器人的感知和自主性至關重要。然而,它們的可變形體和動態驅動在預測傳感器制造和長期魯棒性方面帶來了挑戰。這需要精確的傳感器建模和在應變下良好控制的傳感器結構變化。
據麥姆斯咨詢報道,近期,新加坡國立大學(National University of Singapore)的研究人員提出了一種計算傳感器設計,其特點是微褶皺策略中的編程裂紋陣列。通過控制自定義結構,傳感性能變得高度可調,并且可以通過物理模型精確建模。此外,該傳感器在噪聲干擾(50%應變)、間歇性循環載荷(100,000次循環)和動態頻率(0-23 Hz)等各種苛刻的條件下,仍能保持強大的響應能力,滿足從宏觀到微觀各種規模的軟體機器人。相關研究成果以“Computational design of ultra-robust strain sensors for soft robot perception and autonomy”為題發表在Nature Communications期刊上。
在這項研究中,研究人員采用環境穩定的單壁碳納米管(SWNT)來制備壓阻應變傳感器。他們開發了一種兩階段設計,結合了“微褶皺中的編程裂紋陣列”的特征,得到了簡稱為PCAM的傳感器。首先,通過精確的傳感器制造和規定的結構演變來實現傳感器建模。基本上,通過激光輔助制造,用戶定義的叉指型裂紋陣列被編程在壓阻應變傳感器的微褶皺內,顯示出高度可控的裂紋擴展行為和可調諧的傳感器特性。通過輸入包括裂紋密度和微褶皺特征在內的傳感器結構參數,建立相應的有限元分析(FEA)模型,以引導包括機械和電學演化的雙重物理場,并高精度地模擬不同傳感器的傳感曲線。然后,通過確定的裂紋擴展模式和微褶皺特征,實現了傳感器的良好魯棒性。
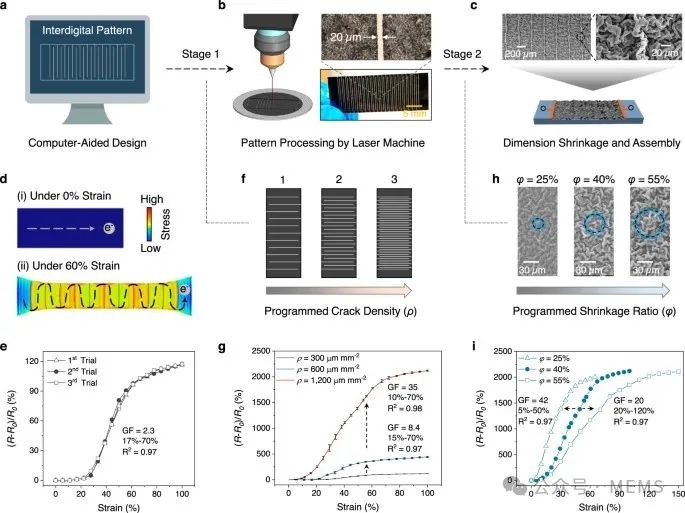
計算引導的PCAM傳感器設計
本文所開發的PCAM傳感器在噪聲干擾(高達50%的應變)、間歇性循環載荷(100,000個循環)和動態操作頻率(0-23 Hz)等各種具有挑戰性的工作條件下,均能保持穩健的傳感響應。這種魯棒傳感器極大地增強了集成軟體機器人的感知能力,為監測其高自由度身體變形和多模態驅動行為提供了穩定的傳感信號,確保了構建預測模型時的高學習效率。
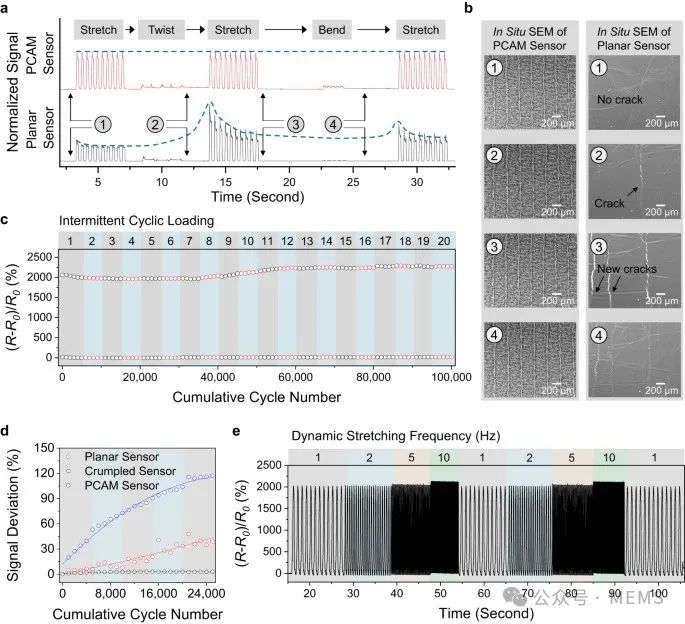
PCAM傳感器的機械穩定性
PCAM傳感器在軟體機器人上的有效集成,構建了復雜軟體爬行機器人的高級機器智能。對于當前在軟機器人或執行器上的機器學習(ML)應用,應用目標主要是軟手套或軟夾具。為了捕捉它們的運動,毫無疑問要在所有抓爪或手套手指上安裝傳感器。
然而,對于本研究中的爬行折紙機器人,傳感器位置有40多種可能性,這對有效捕捉其高自由度和多模態運動提出了挑戰。為了實現機器人自主性,研究人員開發了一個高分辨率傳感器網絡(優化機器人身上的傳感器數量和位置),以收集機器人折紙運動最具代表性的關鍵信息。因此,簡單的人工神經網絡框架和不到40個訓練樣本足以生成預測模型,并成功實現了軟爬行機器人的高級機器人自主性(即機器人軌跡預測和地形高度感知)。
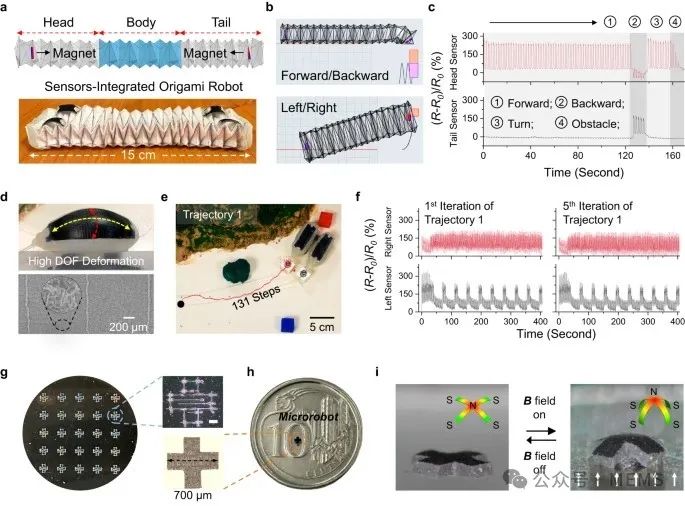
集成PCAM傳感器的不同規模的軟體機器人
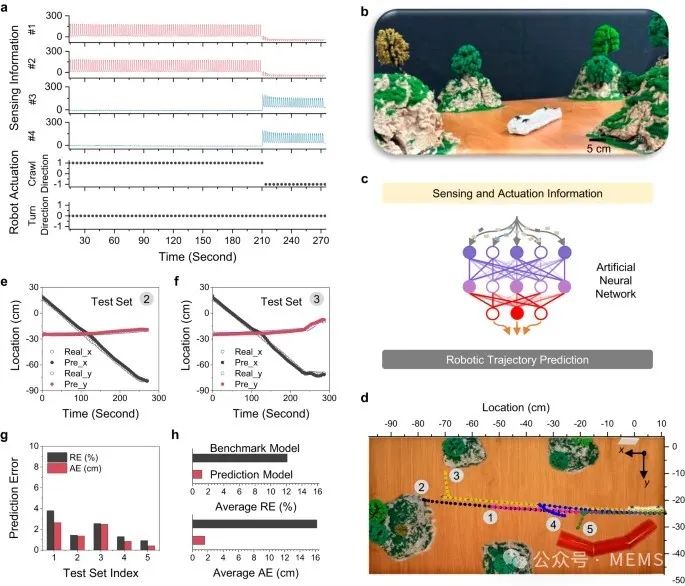
用于機器人軌跡預測的智能傳感器網絡
總而言之,研究人員開發了一種計算應變傳感器設計,其基于微褶皺策略中的編程裂紋陣列,克服了預測制造、用戶特定參數和超穩定性的嚴格要求。通過控制用戶自定義的參數,即裂紋密度和收縮率,PCAM傳感器的應變靈敏度因數和線性工作窗口是高度可調的,并且可以用有限元分析工具對其傳感行為進行高精度建模。PCAM傳感器在噪聲、間歇性和動態操作等各種具有挑戰性的工作條件下,均表現出優異的機械魯棒性。這些傳感器可以進一步集成到跨越宏、微觀尺度的各種軟機器人中,無論機器人規模如何,都能保持一致和可靠的感知。最后,將人工神經網絡算法引入到集成傳感器的折紙機器人中,實現了機器自主導航、高精度軌跡預測和周圍感知導航。
從未來的角度來看,該應變傳感器設計對從折紙機器人到氣動機器人以及從宏觀到微觀的各種軟體機器人表現出高度的適應性。這些高度適應性的集成傳感器的軟體機器可以應用于各種環境,使它們具有增強的感知功能和機器智能能力。這種多功能性為各種任務提供了優勢,例如機器人可以在有限的物理空間中操作(例如化學品泄漏和貨物運送),在未知環境中導航,以及能夠遠程控制不受束縛的機器人。此外,可以開發更先進的機器學習算法來連接和管理多個集成傳感器的機器人,為實現更高的軟體機器人群體智能提供機會。
審核編輯:劉清
-
碳納米管
+關注
關注
1文章
158瀏覽量
17471 -
機器學習
+關注
關注
66文章
8487瀏覽量
133985 -
軟體機器人
+關注
關注
1文章
113瀏覽量
11911 -
應變傳感器
+關注
關注
0文章
66瀏覽量
4864 -
柔性傳感器
+關注
關注
1文章
88瀏覽量
4327
原文標題:基于計算設計的超魯棒性應變傳感器,實現軟體機器人的感知和自主性
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
清華大學:軟體機器人柔性傳感技術最新研究進展

機器人“大腦+小腦”范式:算力魔方賦能智能自主導航
《具身智能機器人系統》第10-13章閱讀心得之具身智能機器人計算挑戰
自動駕駛中常提的魯棒性是個啥?

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
高壓放大器在水下撲翼軟體機器人研究中的應用






 工商網監
工商網監
評論