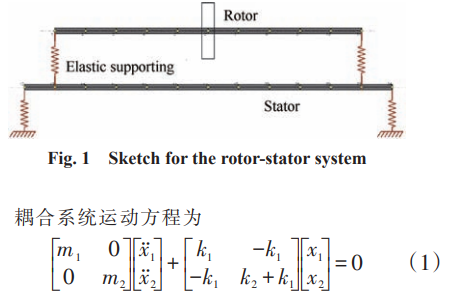
") Ansys Motion等速萬(wàn)向節(jié)剛?cè)狁詈蟿?dòng)力學(xué)仿真方案
Ansys Motion等速萬(wàn)向節(jié)剛?cè)狁詈蟿?dòng)力學(xué)仿真方案
1
前言
傳統(tǒng)多體軟件對(duì)于節(jié)點(diǎn)柔性體的剛?cè)?a href="http://www.asorrir.com/tags/耦合/" target="_blank">耦合分析,需外接有限元求解器來(lái)求解結(jié)構(gòu)變 形,因此用戶體驗(yàn)割裂感較強(qiáng),且額外的有限元求解器也增加了實(shí)際成本。Ansys Motion集成了多體求解器和基于有限元柔性體的結(jié)構(gòu)求解器,將剛體和不同類(lèi)型柔性體結(jié)合在同一系統(tǒng)中,求解中結(jié)合全局坐標(biāo)系和相對(duì)坐標(biāo)系概念,讓剛?cè)狁詈?a target="_blank">仿真達(dá)到以前難以實(shí)現(xiàn)的便捷程度。
Ansys Motion 支持節(jié)點(diǎn)柔性體和模態(tài)柔性體,對(duì)求解大自由度、大變形、非線性材料(超彈性材料)、高速運(yùn)動(dòng)以及邊界條件發(fā)生劇烈變化的非線性接觸問(wèn)題有獨(dú)特優(yōu)勢(shì),Motion 針對(duì)不同應(yīng)用場(chǎng)景開(kāi)發(fā)多個(gè)接觸模型(剛體-剛體,剛體-柔性體,柔性體-柔性體),利用隱式積分算法和專(zhuān)用于剛?cè)峄旌舷到y(tǒng)定制的稀疏矩陣,在求解非線性問(wèn)題時(shí)保證了仿真結(jié)果的穩(wěn)定和精度,完善的解決了傳統(tǒng)動(dòng)力學(xué)分析仿真結(jié)果收斂困難的痛點(diǎn)。
本文將介紹利用AnsysMotion進(jìn)行等速萬(wàn)向節(jié)模型動(dòng)力學(xué)仿真,重點(diǎn)介紹在motion中建立萬(wàn)向節(jié)模型的剛?cè)狁詈蟿?dòng)力學(xué)模型的步驟,在同一系統(tǒng)中同時(shí)使用節(jié)點(diǎn)柔性體和模態(tài)柔性體,從而提高求解效率。
2
利用Ansys Motion建立等速萬(wàn)向節(jié)動(dòng)力學(xué)模型
目前,AnsysMotion有兩個(gè)版本可使用,一個(gè)是在workbench平臺(tái)Mechanical界面下運(yùn)行,另一個(gè)是Motion獨(dú)立版本,用戶可根據(jù)習(xí)慣選擇熟悉版本,本文以Motion獨(dú)立版為例進(jìn)行介紹。 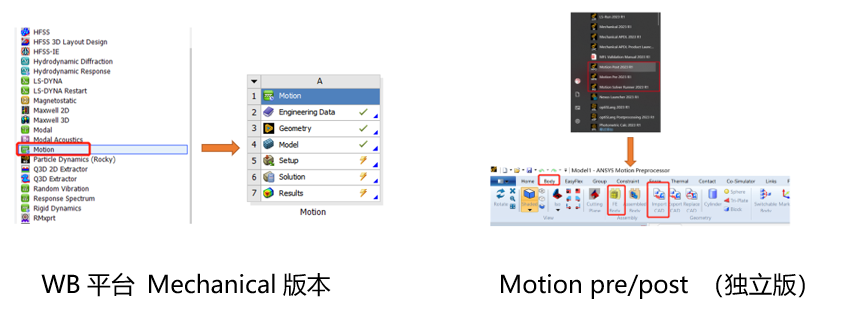
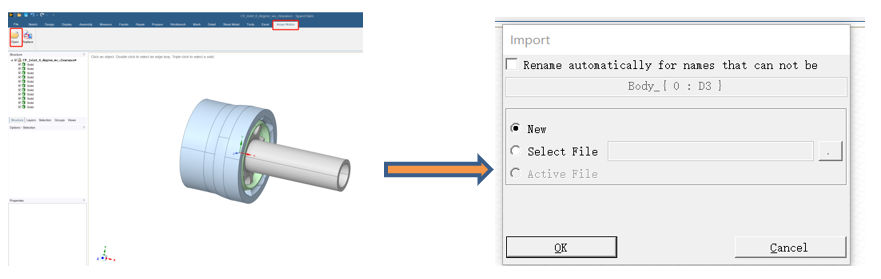
2.1 導(dǎo)入幾何模型
SpaceClaim功能區(qū)集成Ansys Motion幾何模型接口,可以將幾何模型導(dǎo)入/替換Motion pre中的模型,可以自動(dòng)打開(kāi)Motion獨(dú)立版界面。
 ?
?
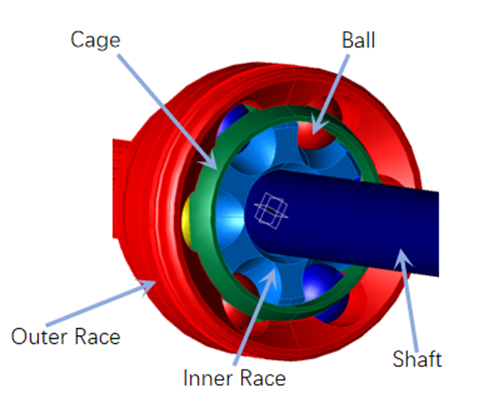
等速萬(wàn)向節(jié)由內(nèi)/外滾道,保持架,軸,滾珠等組成
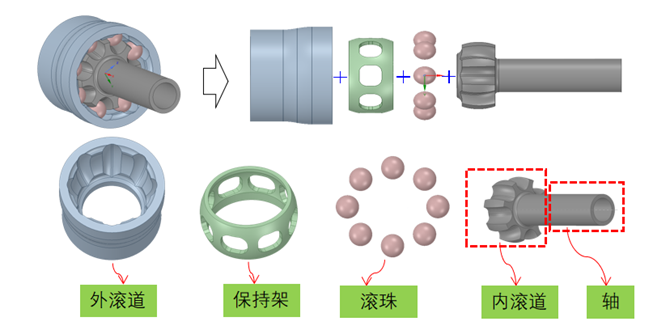
幾何模型修改,邊緣可能會(huì)產(chǎn)生意想不到的噪音,可能會(huì)對(duì)球和內(nèi)/外滾道之間的接觸產(chǎn)生不良影響。
2.2 仿真場(chǎng)景
本次分別建立全剛體模型和剛?cè)狁詈夏P瓦M(jìn)行動(dòng)力學(xué)分析,全剛體和剛?cè)狁詈夏P停鶕?jù)柔性體節(jié)點(diǎn)數(shù)量,其在求解時(shí)間上差別很大,用戶可根據(jù)需要選擇適合的類(lèi)型。如下所示,case1為全剛體模型,case2將保持架設(shè)為節(jié)點(diǎn)柔性體,case3將保持架,內(nèi)滾道節(jié)點(diǎn)柔性體,將輸入軸設(shè)為模態(tài)柔性體,考慮其變形和應(yīng)力情況。

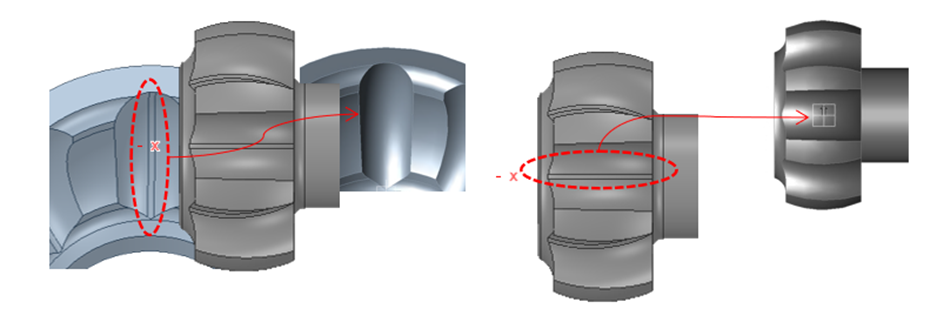
2.3 Ansys Motion接觸建模
Mechanical環(huán)境中的contact對(duì)應(yīng)的獨(dú)立版中的BASE,Target對(duì)應(yīng)Action ;
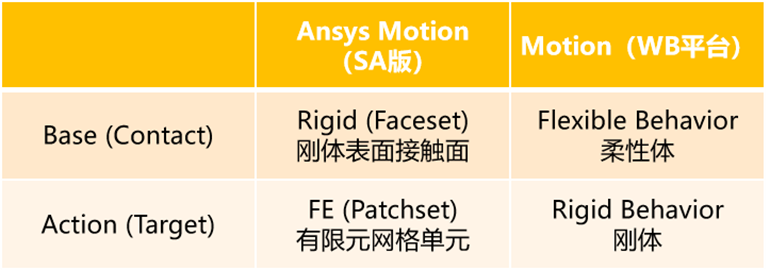
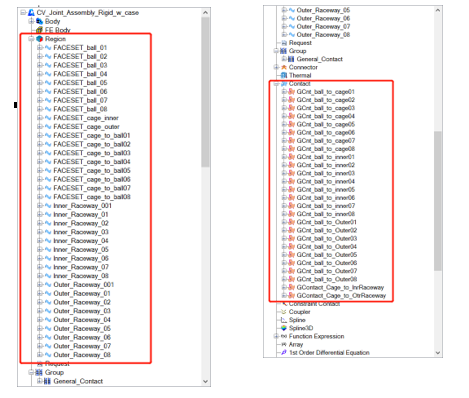
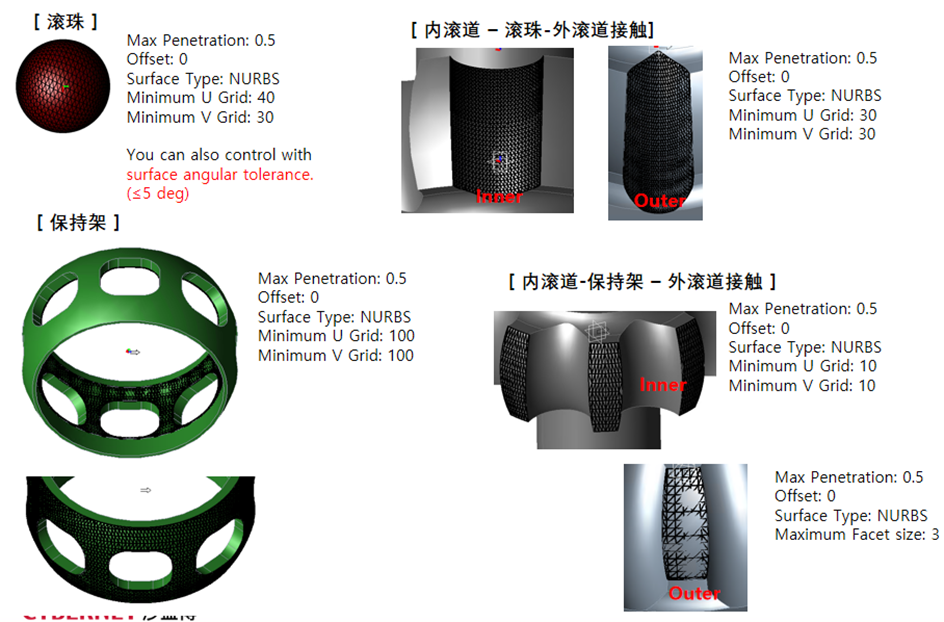
Case1. 全剛體接觸模型
分別在滾珠與內(nèi)/外滾道,保持架;保持架與內(nèi)/外滾道之間定義通用接觸General contact;
先定義參與接觸的面集faceset→定義通用接觸General contact

 ?
?  ?
?
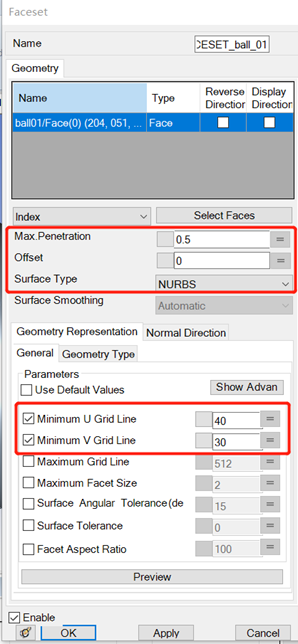
設(shè)置Faceset 參數(shù)
facet尺寸對(duì)接觸計(jì)算有較大影響,需保持表面網(wǎng)格均勻光滑。但是,過(guò)細(xì)的表面網(wǎng)格會(huì)增加檢測(cè)接觸面的時(shí)間。
NURBS:的非均勻有理B樣條曲線曲面(Non-Uniform RationalB-Splines)
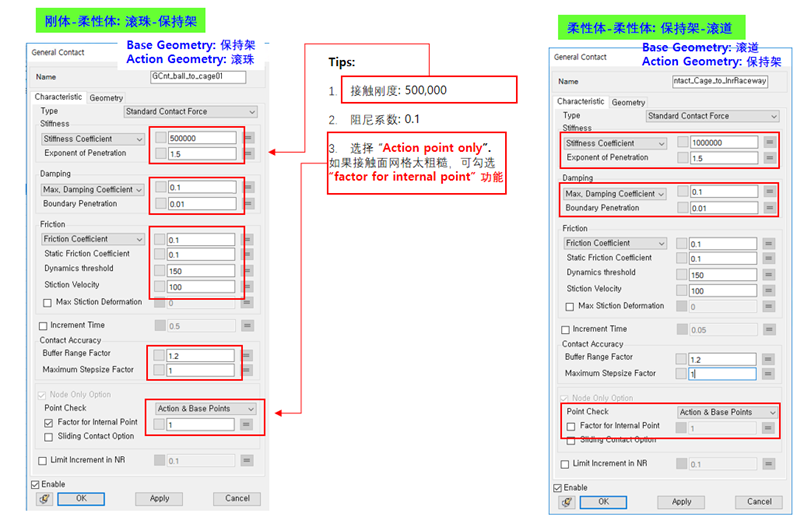
Case2. 剛?cè)狁詈辖佑|模型(保持架)
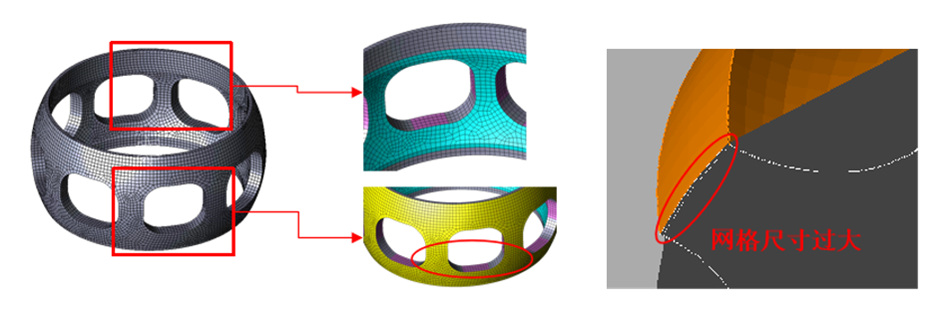
采用自動(dòng)網(wǎng)格法(六邊形為主)對(duì)籠體進(jìn)行網(wǎng)格劃分,通過(guò)手動(dòng)調(diào)整網(wǎng)格,可以提高籠體的網(wǎng)格質(zhì)量。
Tips: 確保網(wǎng)格線與CAD幾何圖形一致。(在進(jìn)行嚙合工作時(shí),CAD幾何圖形可能會(huì)扭曲(調(diào)整大小),并可能導(dǎo)致接觸不穩(wěn)定。(引起意外的初始接觸力)
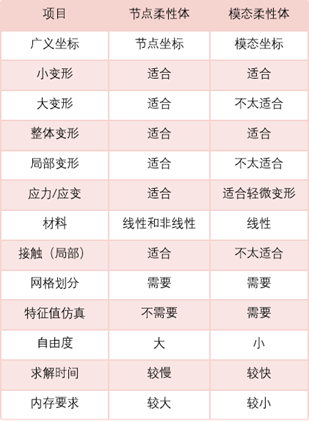
節(jié)點(diǎn)柔性體和模態(tài)柔性體比較
Case3. 剛?cè)狁詈辖佑|模型(保持架+內(nèi)滾道+軸)
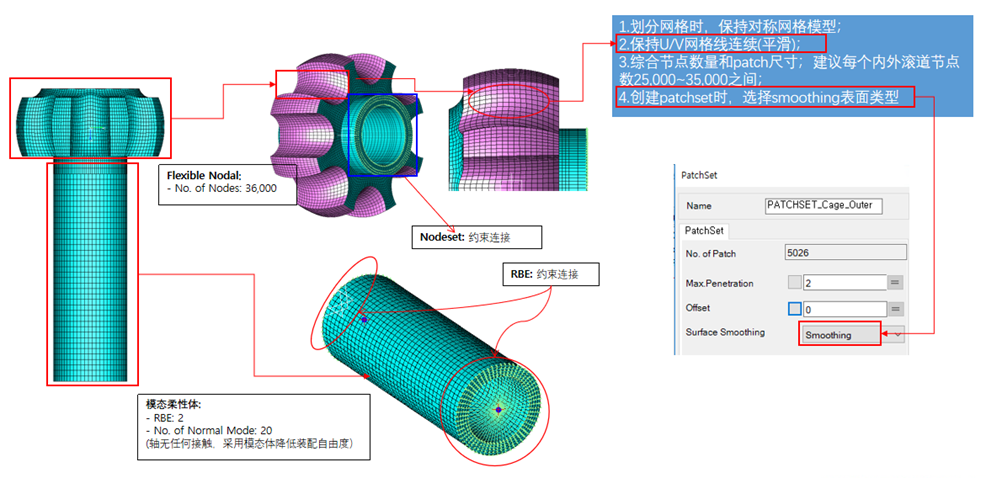
設(shè)置FE節(jié)點(diǎn)柔性體Patchset參數(shù)
設(shè)置剛體接觸面faceset參數(shù)
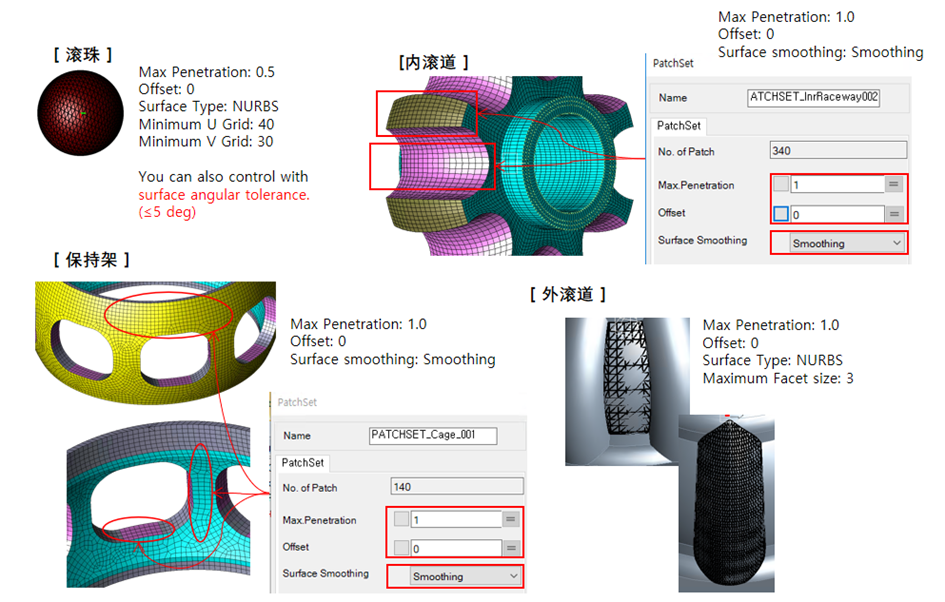
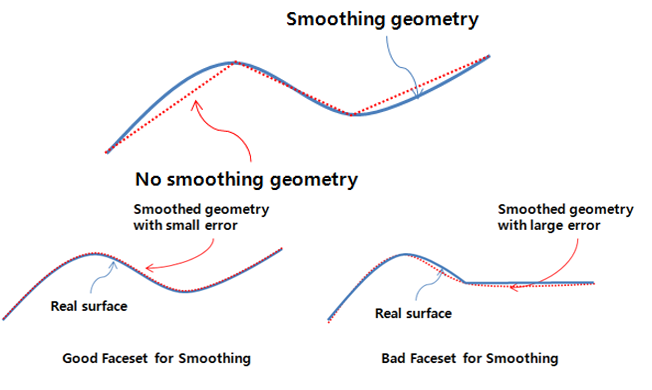
Surface Smoothing
選擇Surface Smoothing時(shí),根據(jù)幾何實(shí)際情況建議使用No Smoothing或Smoothing,盡量不使用automatic;
“no smoothing”選項(xiàng)使求解器使用在界面邊緣有不連續(xù)切平面的原始facet。如果相鄰兩個(gè)切面的切平面的不連續(xù)很小,則使用此選項(xiàng)是很好的。“smoothing”選項(xiàng)使求解器使用高階多項(xiàng)式曲面,以避免相對(duì)角度較大的兩個(gè)相鄰切面的切平面不連續(xù)。“自動(dòng)”選項(xiàng)計(jì)算兩個(gè)相鄰切面的相對(duì)角度,僅當(dāng)兩個(gè)相鄰切面的相對(duì)角度較大時(shí),才應(yīng)用高階多項(xiàng)式曲面。
節(jié)點(diǎn)柔性體:內(nèi)滾道; 模態(tài)柔性體:軸
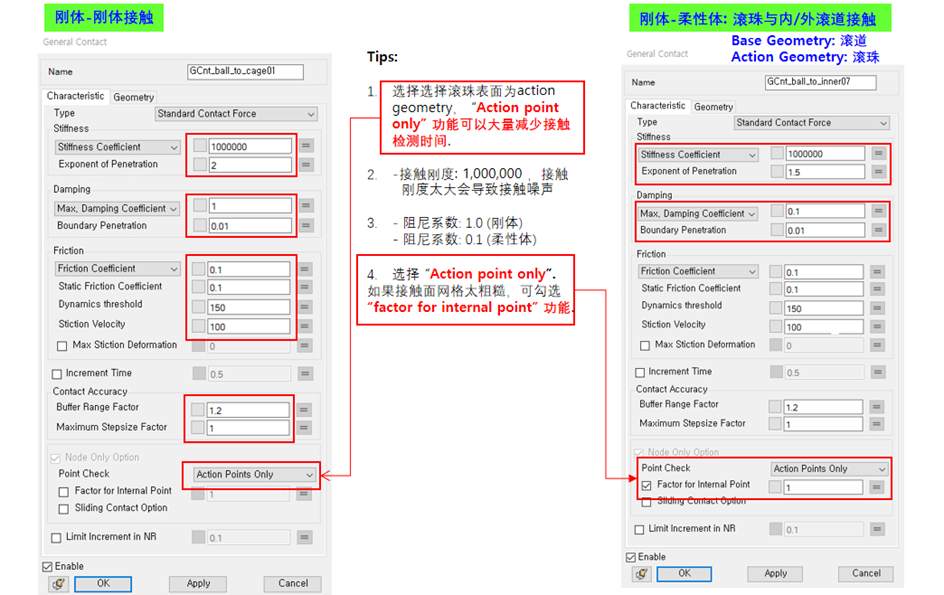
接觸參數(shù)設(shè)置
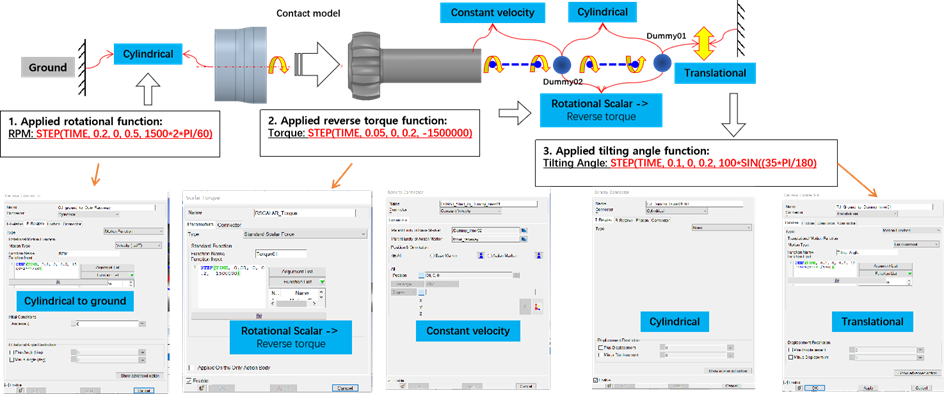
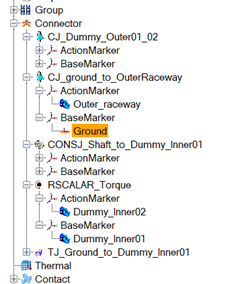
2.4 Constraint and Joint
保持架,滾珠,外滾道與內(nèi)滾道之間通過(guò)定義部件接觸傳遞運(yùn)動(dòng);
如下圖所示,在模型中添加移動(dòng)副,圓柱副,等速萬(wàn)向節(jié)和標(biāo)量力;
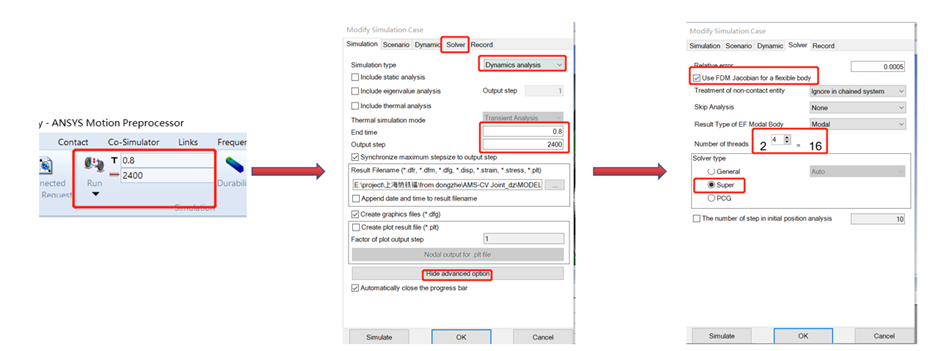
2.5 求解設(shè)置
求解器相關(guān)設(shè)置,求解時(shí)間:0.8s,輸出步長(zhǎng):2400。
SolverType: Super,當(dāng)系統(tǒng)沒(méi)有不連續(xù)接觸的問(wèn)題,或系統(tǒng)有節(jié)點(diǎn)有限元體并發(fā)生小變形時(shí),其求解速度優(yōu)于general求解器。
UseFDM Jacobian:使用此選項(xiàng)可以通過(guò)FDM(有限微分法)計(jì)算出更精準(zhǔn)的雅可比矩陣。如果仿真模型具有高頻率和較大的接觸剛度,使用此選項(xiàng)將增加步長(zhǎng),提高解決方案。
2.6 仿真結(jié)果
Motionpost是非常強(qiáng)大的專(zhuān)用后處理
Case 1:全剛體模型
4#滾珠與內(nèi)/外滾道之間接觸力
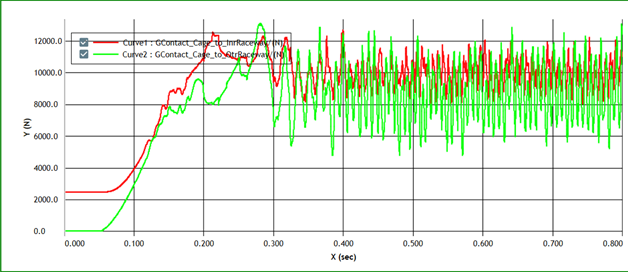
保持架與內(nèi)/外滾道之間接觸力
 ?
?
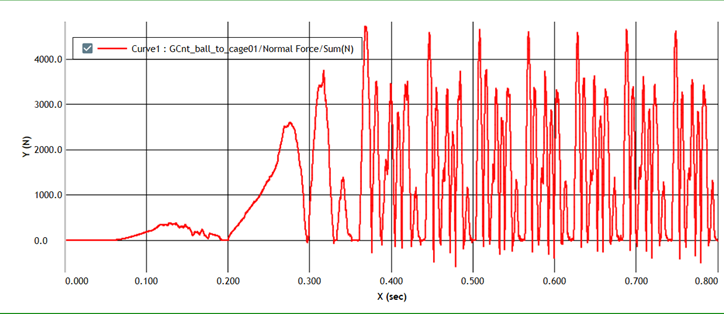
1#滾珠與保持架之間接觸力
Case2. 剛?cè)狁詈辖佑|模型(保持架)
Contourrange has changed: Min: 0 ~Max: 200Mpa
Maximumstress: 1097Mpa
Case3. 剛?cè)狁詈辖佑|模型(保持架+內(nèi)滾道+軸)
3
總結(jié)
本案例以等速傳動(dòng)軸為例,利用ansysmotion對(duì)等速萬(wàn)向節(jié)模型進(jìn)行動(dòng)力學(xué)建模,分別進(jìn)行全剛體模型,剛?cè)狁詈夏P蛣?dòng)力學(xué)分析,詳述具體設(shè)置步驟和接觸建模方法。
Ansys Motion為新一代專(zhuān)業(yè)剛?cè)狁詈隙囿w動(dòng)力學(xué)分析軟件,可以在同一系統(tǒng)中同時(shí)建立剛體和柔性體模型,擁有獨(dú)立motion求解器,針對(duì)不同應(yīng)用場(chǎng)景,提供多種接觸模型,對(duì)求解大自由度,高速運(yùn)動(dòng),非線性接觸問(wèn)題優(yōu)勢(shì)明顯。
AnsysMotion同時(shí)支持節(jié)點(diǎn)和模態(tài)柔性體,并可以自由選擇,節(jié)點(diǎn)柔心體適合大變形,非線性材料,整體和局部變形,適合所有類(lèi)型柔性體,求解時(shí)間長(zhǎng);模態(tài)柔性體利用模態(tài)坐標(biāo)適合求解小變形,線性問(wèn)題,求解效率高。
審核編輯:劉清
-
CAD
+關(guān)注
關(guān)注
18文章
1108瀏覽量
73778 -
ANSYS
+關(guān)注
關(guān)注
10文章
240瀏覽量
36977 -
求解器
+關(guān)注
關(guān)注
0文章
79瀏覽量
4695
原文標(biāo)題:莎益博案例 | Ansys Motion等速萬(wàn)向節(jié)剛?cè)狁詈蟿?dòng)力學(xué)仿真方案
文章出處:【微信號(hào):ilinki,微信公眾號(hào):智匯工業(yè)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
Adams多體動(dòng)力學(xué)仿真解決方案全面解析
輪轂電機(jī)驅(qū)動(dòng)電動(dòng)汽車(chē)垂向動(dòng)力學(xué)控制研究綜述
航空發(fā)動(dòng)機(jī)整機(jī)動(dòng)力學(xué)有限元模型建立方法
佛山智能裝備技術(shù)研究院機(jī)器人動(dòng)力學(xué)研究成果取得世界級(jí)突破

【Simcenter STAR-CCM+】通過(guò)快速準(zhǔn)確的CFD仿真加速空氣動(dòng)力學(xué)創(chuàng)新

使用Phase Lab鎳基動(dòng)力學(xué)數(shù)據(jù)庫(kù)計(jì)算多組分合金的成分分布曲線

這些電源常用仿真軟件,你都知道嗎?
“本源悟空”超導(dǎo)量子計(jì)算機(jī)助力大規(guī)模流體動(dòng)力學(xué)量子計(jì)算

Simcenter STAR-CCM+車(chē)輛外部空氣動(dòng)力學(xué)特性——通過(guò)快速準(zhǔn)確的CFD仿真加速空氣動(dòng)力學(xué)創(chuàng)新

PT500齒輪傳動(dòng)動(dòng)力學(xué)綜合測(cè)試實(shí)驗(yàn)臺(tái)
關(guān)于動(dòng)力學(xué)方程能否用matlab進(jìn)行傅里葉變換的問(wèn)題。
圓滿收官|(zhì) Aigtek參展第二屆波動(dòng)力學(xué)前沿與應(yīng)用學(xué)術(shù)會(huì)議載譽(yù)歸來(lái)!

邀請(qǐng)函| Aigtek安泰電子攜經(jīng)典產(chǎn)品,亮相第二屆波動(dòng)力學(xué)前沿與應(yīng)用學(xué)術(shù)會(huì)議!
matlab纜索動(dòng)力學(xué)?
自動(dòng)駕駛聯(lián)合仿真——功能模型接口FMI(終)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論