") 從原理級別對CAN和RS485進行詳細的對比分析
從原理級別對CAN和RS485進行詳細的對比分析
在工業(yè)通信領(lǐng)域,控制器局域網(wǎng)(CAN)和RS485是兩種常用的通信標準,它們各自適用于不同的應(yīng)用場景。為了深入理解這兩種技術(shù)的優(yōu)勢和局限性,本文將從原理級別對CAN和RS485進行詳細的對比分析。
CAN協(xié)議深入分析
CAN協(xié)議是一種面向消息的通信協(xié)議,它在物理層和數(shù)據(jù)鏈路層提供高度可靠的通信。CAN協(xié)議的核心特點包括:
消息傳輸
基于消息ID的優(yōu)先級傳輸:CAN網(wǎng)絡(luò)中的消息包含唯一的標識符(ID),用于定義消息的優(yōu)先級。ID較小的消息具有更高的傳輸優(yōu)先級。
非破壞性總線仲裁:在消息傳輸過程中,如果兩個或多個節(jié)點同時嘗試傳輸,具有較低ID(高優(yōu)先級)的消息將獲勝,而其他節(jié)點會自動停止傳輸并等待總線空閑。
錯誤處理
復(fù)雜的錯誤檢測機制:包括幀檢驗、循環(huán)冗余校驗(CRC)、確認錯誤等多種機制,確保數(shù)據(jù)傳輸?shù)目煽啃浴?/p>
錯誤限制和故障恢復(fù):節(jié)點在檢測到錯誤時會增加其錯誤計數(shù)器,并在達到一定閾值時進入限制模式或甚至離線模式,從而防止故障節(jié)點干擾網(wǎng)絡(luò)。
物理層
差分信號傳輸:CAN使用兩條線(CAN-H和CAN-L)傳輸差分信號,提高了抗電磁干擾的能力。
RS485協(xié)議深入分析
RS485標準定義了在多點通信系統(tǒng)中物理層的電氣特性,它支持長距離和多點通信。RS485的核心特點包括:
電氣規(guī)范
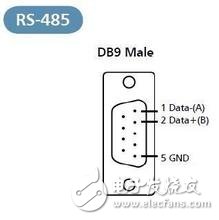
差分信號:與CAN類似,RS485通過一對線(A和B)傳輸差分信號,提高了信號的抗干擾能力。
長距離通信:RS485能夠支持長達1200米的通信距離,適合大型工業(yè)應(yīng)用。
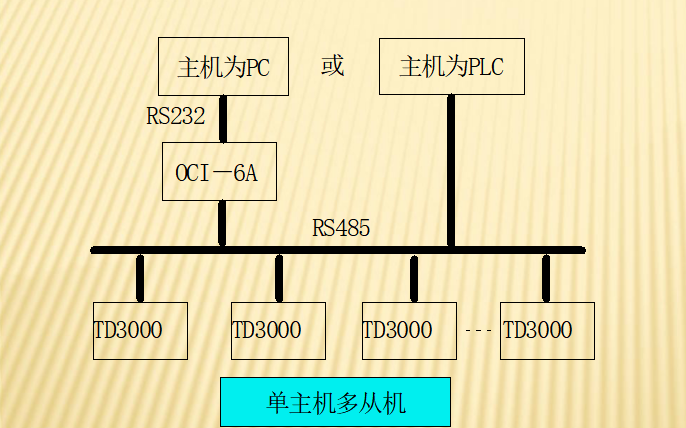
網(wǎng)絡(luò)拓撲
多點總線結(jié)構(gòu):一個RS485通信總線上可以連接多達32個(理論上)設(shè)備,通過適當?shù)慕K端電阻匹配來減少信號反射。
通信模式
半雙工通信:RS485通常工作在半雙工模式,這意味著通信設(shè)備在任何時候要么發(fā)送數(shù)據(jù),要么接收數(shù)據(jù),但不能同時進行。
CAN vs RS485: 原理對比
通信安全與可靠性
CAN:通過復(fù)雜的錯誤處理機制,提供極高的數(shù)據(jù)傳輸可靠性,尤其適合于安全性要求極高的汽車和工業(yè)自動化應(yīng)用。
RS485:雖然具有良好的抗干擾能力,但在數(shù)據(jù)鏈路層缺乏類似CAN的高級錯誤處理功能。
網(wǎng)絡(luò)管理與拓展性
CAN:通過非破壞性仲裁和消息ID優(yōu)先級機制,實現(xiàn)了高效的網(wǎng)絡(luò)管理,易于實現(xiàn)復(fù)雜的網(wǎng)絡(luò)拓撲。
RS485:適合簡單的多點通信,但在大規(guī)模網(wǎng)絡(luò)中需要額外的網(wǎng)絡(luò)管理機制以處理數(shù)據(jù)沖突和節(jié)點地址分配。
應(yīng)用領(lǐng)域
CAN:由于其高可靠性和實時性,CAN被廣泛應(yīng)用于汽車電子、航空航天和工業(yè)自動化等領(lǐng)域。
RS485:由于其長距離通信能力和多點支持,RS485常用于樓宇自動化、工業(yè)控制系統(tǒng)和遠程監(jiān)控等應(yīng)用。
結(jié)論
CAN和RS485各自在不同的應(yīng)用領(lǐng)域展現(xiàn)出獨特的優(yōu)勢。選擇合適的通信協(xié)議需要根據(jù)具體的應(yīng)用需求,考慮通信距離、可靠性、網(wǎng)絡(luò)管理和成本等因素。理解這些協(xié)議的基本原理和特點,可以幫助工程師設(shè)計出更加高效、可靠的通信系統(tǒng)。
審核編輯:劉清
-
控制器
+關(guān)注
關(guān)注
114文章
16960瀏覽量
182872 -
RS485
+關(guān)注
關(guān)注
39文章
1221瀏覽量
83618 -
CAN網(wǎng)絡(luò)
+關(guān)注
關(guān)注
1文章
45瀏覽量
17331 -
工業(yè)通信
+關(guān)注
關(guān)注
0文章
147瀏覽量
15773
原文標題:CAN與RS485: 深入原理及應(yīng)用對比分析
文章出處:【微信號:玩轉(zhuǎn)單片機與嵌入式,微信公眾號:玩轉(zhuǎn)單片機與嵌入式】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
一文詳解RS232、RS485、CAN總線
CAN-bus RS485 升級到CAN
rs485通訊協(xié)議
CAN-bus 現(xiàn)場總線應(yīng)用方案RS485 升級到CAN
以CAN與RS485為例總結(jié)各自優(yōu)勢 解疑“為什么CAN能取代RS485”

一文看懂RS485和ARINC485的區(qū)別
微雪電子BB Black RS485 CAN擴展板簡介
微雪電子RS485 CAN通信擴展板簡介

RS485通信的詳細資料講解
RS485總線與TCP/IP協(xié)議對比分析
【STM32筆記1】TTL、RS232、RS485、CAN的主要區(qū)別(另有串口、COM口、UART口的說明)

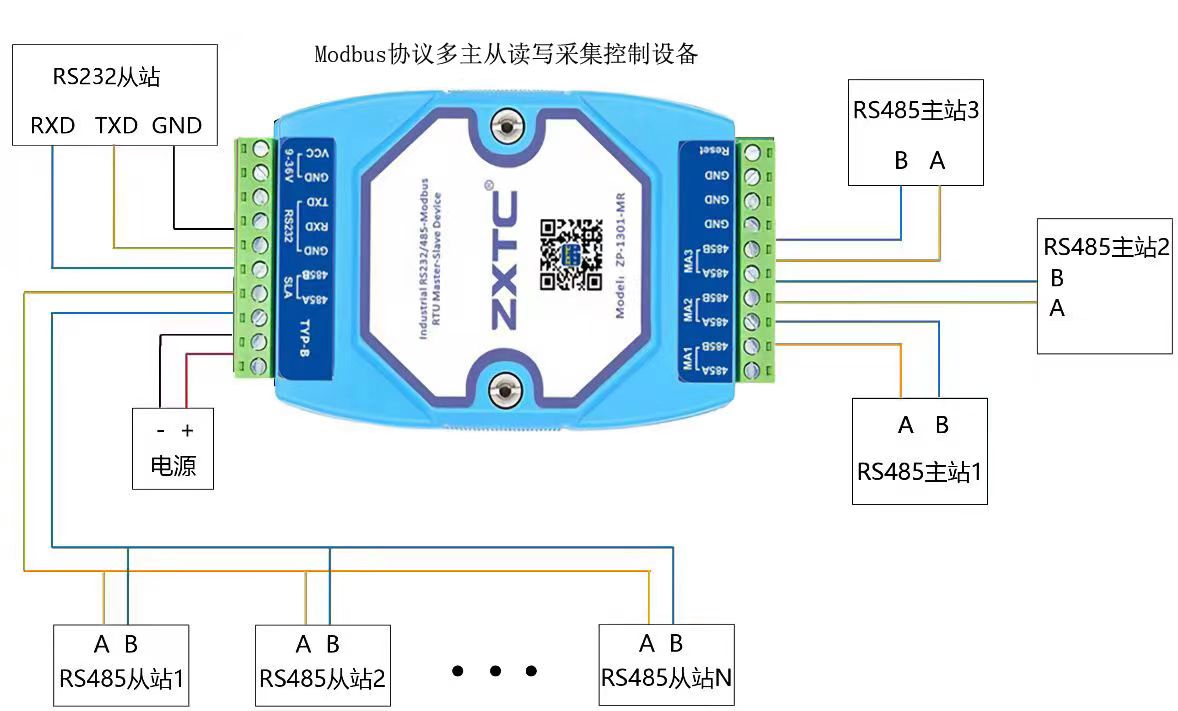
Modbus多主機RS485兩主一從設(shè)備怎么通訊





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論