 AirPods 監控頭部運動,同步大象機器人myCobot 280協作機械臂
AirPods 監控頭部運動,同步大象機器人myCobot 280協作機械臂
本篇文章是經過作者kimizuka授權,進行編輯轉載。
原文鏈接:AirPods → iPhoneアプリ → Express → python-shell → pymycobot → myCobotと繋いでいって、AirPodsの回転角とmyCobotの姿勢と同期する
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
python
+關注
關注
56文章
4823瀏覽量
86149 -
機械臂
+關注
關注
13文章
542瀏覽量
25214 -
大象機器人
+關注
關注
0文章
85瀏覽量
67
發布評論請先 登錄
相關推薦
熱點推薦
使用myCobot 280 Jeston Nano進行物體精確識別追蹤
,以便在實際應用中發揮作用,這個項目涉及到許多技術和算法,包括視覺識別、手眼協同和機械臂控制等方面。 機械臂的介紹 mycobot280-J
結合大象機器人六軸協作機械臂myCobot 280 ,解決特定的自動化任務和挑戰!(下)
。 本文主要深入項目內核的主要部分,同樣也主要分為三個部分:機械臂的視覺抓取,LIMO?Pro在ROS中的功能,建圖導航避障等,以及兩個系統的集成。 設備準備 myCobot?280?

如何控制真實機械臂/機器人呢
數據傳輸的通道,如何將ROS功能包計算得到的數據發給真實機器人并使之運動是問題的關鍵。機械臂有點復雜,我們先以簡單一些的ROS小車為例,看看ROS是如何讓真實小車動起來的。大家在某寶上
發表于 09-07 09:12
基于Jetson Nano的六軸協作機械臂myCobot
大象機器人致力于為機器人教育及科研機構、商業場景、工業生產提供高柔性的協作機器人、簡單易學的操作系統以及智能的自動化解決方案。
Mycobot機械臂各關節的運動(三)
這一節我們開始第一個程序,就是機械臂各關節的運動。讓我們首先打開Mycobot,然后登入一個終端,我們輸入“python”進入python環境。 ? 我們采用一邊實驗一邊介紹
使用 Python 和可視化編程控制樹莓派機械臂myCobot
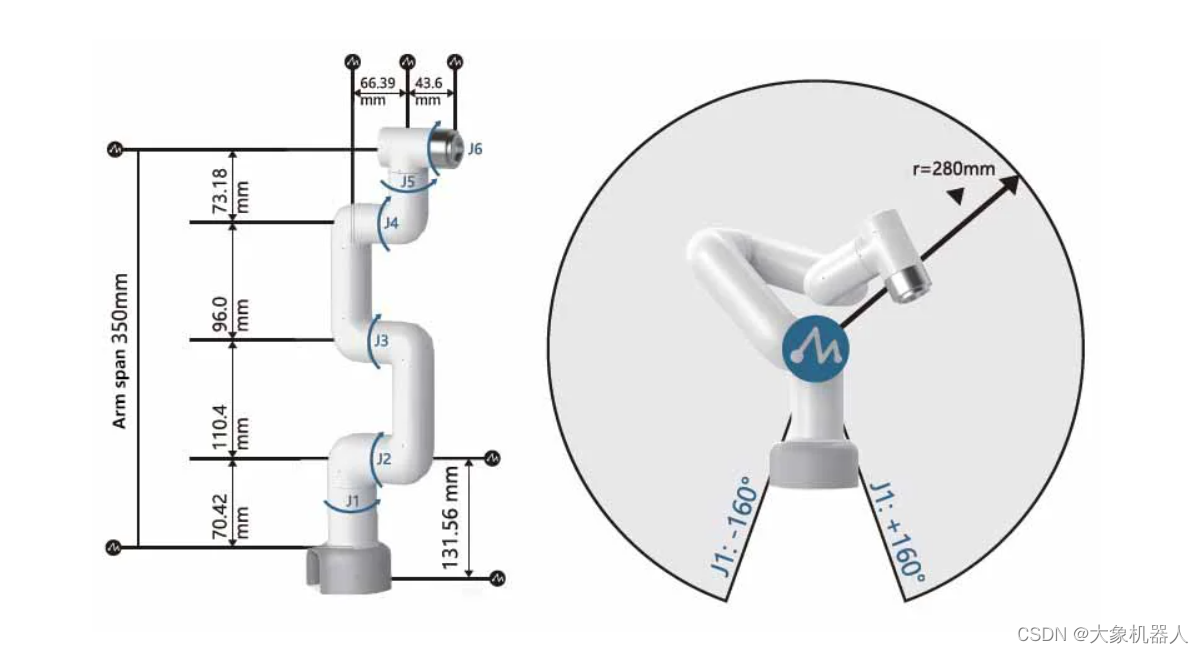
myCobot 280 Pi 是一款 6 自由度多功能桌面機械臂。它由大象機器人研發,使用 Ra



大象機器人六軸協作機械臂myCobot 320 進行手勢識別!
引言 我是一名專注于機器學習和機器人技術自由者。我的熱情始于大學期間的人工智能課程,這促使我探索人機交互的新方法。尤其對于機械臂的操作,我一直想要簡化其復雜性,使之更加直觀和易于使用。

結合大象機器人六軸協作機械臂myCobot 280 ,解決特定的自動化任務和挑戰!(上)
PPRO SLAM雷達小車,它具備自主導航、地圖構建和路徑規劃的能力;另一部分是Mycobot 280 M5機械臂,這是一個具有六自由度、工作半徑
大象機器人myCobot 320六軸協作機械臂用戶開箱!
本篇文章是經過作者はるなし的授權,進行轉載編輯,感謝はるなし給我們貢獻了一篇很好的開箱文章。 引言 HI,我是はるなし。我是一名醫學生,喜歡制作機器人和人工智能。這次我購買了myCobot pro

大象機器人開源協作機械臂myCobot 630 全面升級!
1. 開篇概述 在快速發展的機器人技術領域中,Elephant Robotics的myCobot 600已經證明了其在教育、科研和輕工業領域的顯著適用性。作為一款具備六自由度的機械臂,
大象機器人開源協作機械臂機械臂接入GPT4o大模型!
和智能化的任務,提升了人機協作的效率和效果。我們個人平時接觸不太到機械臂這類的機器人產品,但是有一種小型的機械

大象機器人推出myCobot 280 RDK X5,攜手地瓜機器人共建智能教育機
摘要大象機器人全新推出輕量級高性能教育機械臂myCobot280RDKX5,該產品集成地瓜機器人






 工商網監
工商網監
評論