") 自動(dòng)泊車(chē)和遙控泊車(chē)的區(qū)別
自動(dòng)泊車(chē)和遙控泊車(chē)的區(qū)別
隨著科技的快速發(fā)展,汽車(chē)行業(yè)也在不斷的創(chuàng)新與進(jìn)步。自動(dòng)駕駛技術(shù)是其中的一個(gè)重要方向,而自動(dòng)泊車(chē)和遙控泊車(chē)作為自動(dòng)駕駛的子技術(shù)之一,受到了廣大車(chē)主和消費(fèi)者的關(guān)注。然而,這兩種泊車(chē)技術(shù)看似很相似,實(shí)則存在著顯著的差異。本文將比較自動(dòng)泊車(chē)和遙控泊車(chē)的區(qū)別。
一、自動(dòng)泊車(chē)技術(shù)
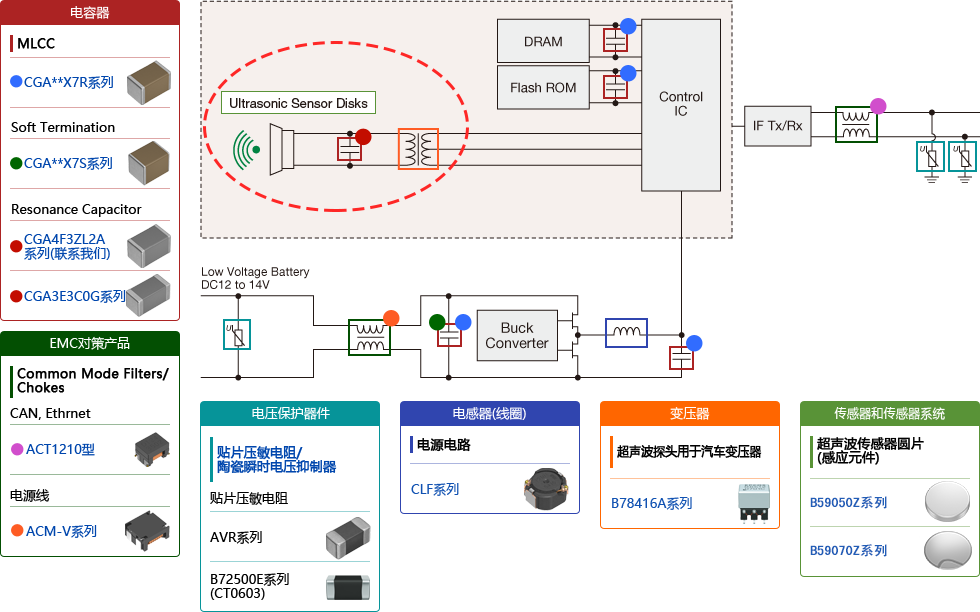
自動(dòng)泊車(chē)技術(shù)是指車(chē)輛通過(guò)內(nèi)置的傳感器、計(jì)算機(jī)和操控系統(tǒng),實(shí)現(xiàn)在無(wú)人操作情況下完成泊車(chē)動(dòng)作的技術(shù)。具體來(lái)說(shuō),通過(guò)傳感器感知周?chē)h(huán)境,計(jì)算機(jī)根據(jù)傳感器數(shù)據(jù)分析判斷并生成最優(yōu)的泊車(chē)路徑,操控系統(tǒng)執(zhí)行相應(yīng)操作,控制方向盤(pán)、加減速等,最終將車(chē)輛安全地駛?cè)牖蝰傠x泊位。
自動(dòng)泊車(chē)技術(shù)主要依靠車(chē)輛內(nèi)置的傳感器系統(tǒng),如超聲波傳感器、攝像頭等,通過(guò)對(duì)周?chē)h(huán)境的感知和分析,實(shí)現(xiàn)車(chē)輛泊車(chē)時(shí)的準(zhǔn)確操控。這種技術(shù)通常通過(guò)車(chē)載計(jì)算機(jī)與傳感器之間的數(shù)據(jù)交互來(lái)實(shí)現(xiàn)泊車(chē)操作,在車(chē)輛行駛過(guò)程中不需要人工干預(yù),完成整個(gè)泊車(chē)過(guò)程。
二、遙控泊車(chē)技術(shù)
遙控泊車(chē)技術(shù)是指車(chē)輛通過(guò)遠(yuǎn)程控制設(shè)備,如智能手機(jī)或遙控器,實(shí)現(xiàn)在遠(yuǎn)離車(chē)輛的情況下進(jìn)行泊車(chē)操作的技術(shù)。具體來(lái)說(shuō),車(chē)主可以使用手機(jī)或遙控器上的按鈕、搖桿等,遠(yuǎn)程操控車(chē)輛的轉(zhuǎn)向、加減速、泊車(chē)位置等,實(shí)現(xiàn)車(chē)輛的自主駕駛泊車(chē)。
遙控泊車(chē)技術(shù)主要依賴(lài)車(chē)輛與遠(yuǎn)程控制設(shè)備之間的無(wú)線(xiàn)通信技術(shù),通過(guò)將車(chē)輛的操作指令傳送給車(chē)載系統(tǒng),實(shí)現(xiàn)車(chē)輛在無(wú)人操控的情況下完成泊車(chē)過(guò)程。這種技術(shù)的優(yōu)勢(shì)在于可以在一定的距離范圍內(nèi)操控車(chē)輛,不需要駕駛員親自坐在車(chē)輛駕駛座上。
三、自動(dòng)泊車(chē)與遙控泊車(chē)的區(qū)別
- 操作方式不同:
自動(dòng)泊車(chē)技術(shù)通過(guò)車(chē)載計(jì)算機(jī)和傳感器系統(tǒng)實(shí)現(xiàn),完全自動(dòng)地進(jìn)行泊車(chē);而遙控泊車(chē)技術(shù)則需要車(chē)主通過(guò)遠(yuǎn)程控制設(shè)備進(jìn)行操控。 - 范圍限制不同:
自動(dòng)泊車(chē)技術(shù)對(duì)范圍沒(méi)有限制,車(chē)載計(jì)算機(jī)通過(guò)傳感器感知周?chē)h(huán)境,自主判斷并完成泊車(chē)動(dòng)作;而遙控泊車(chē)技術(shù)需要車(chē)主在一定的距離范圍內(nèi)操控,超出該范圍無(wú)法實(shí)現(xiàn)遙控操作。 - 駕駛員位于不同位置:
自動(dòng)泊車(chē)技術(shù)下,駕駛員不需要坐在車(chē)輛駕駛座上,完全可以在車(chē)外進(jìn)行其他活動(dòng);而遙控泊車(chē)技術(shù)下,駕駛員雖然不需要坐在駕駛座上,但需要保持一定距離與車(chē)輛保持連接。 - 技術(shù)實(shí)現(xiàn)方式不同:
自動(dòng)泊車(chē)技術(shù)主要依靠車(chē)載傳感器和計(jì)算機(jī)系統(tǒng),通過(guò)車(chē)載計(jì)算機(jī)與傳感器的數(shù)據(jù)交互實(shí)現(xiàn)泊車(chē)操作;而遙控泊車(chē)技術(shù)主要依賴(lài)于車(chē)載通信系統(tǒng)和遠(yuǎn)程控制設(shè)備之間的數(shù)據(jù)傳輸,通過(guò)遠(yuǎn)程操控設(shè)備發(fā)送指令實(shí)現(xiàn)泊車(chē)操作。
自動(dòng)泊車(chē)和遙控泊車(chē)作為自動(dòng)駕駛技術(shù)中的兩種不同形式,各自具有獨(dú)特的優(yōu)勢(shì)與適用范圍。自動(dòng)泊車(chē)技術(shù)更適用于停車(chē)場(chǎng)等需要大量泊車(chē)操作的場(chǎng)所,能夠?qū)崿F(xiàn)完全自主的泊車(chē);而遙控泊車(chē)技術(shù)更適用于狹小空間或需要特殊操作的場(chǎng)景,通過(guò)遠(yuǎn)程操控可以更加便捷靈活地完成泊車(chē)。在選擇時(shí),消費(fèi)者可以根據(jù)自身的需求和喜好,合理選擇適合自己的泊車(chē)技術(shù)。
-
傳感器
+關(guān)注
關(guān)注
2562文章
52524瀏覽量
763498 -
超聲波
+關(guān)注
關(guān)注
63文章
3099瀏覽量
139822 -
自動(dòng)泊車(chē)
+關(guān)注
關(guān)注
0文章
105瀏覽量
13929 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14191瀏覽量
169449
發(fā)布評(píng)論請(qǐng)先 登錄
自動(dòng)泊車(chē)內(nèi)部結(jié)構(gòu)及廠(chǎng)家方案介紹
自動(dòng)泊車(chē)技術(shù)的發(fā)展與原理解析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論