 RA6T2無傳感器矢量控制應用筆記 [完結篇] 評估環境說明 (2)
RA6T2無傳感器矢量控制應用筆記 [完結篇] 評估環境說明 (2)

4. 評估環境說明
4.5.3 分析器功能的變量列表
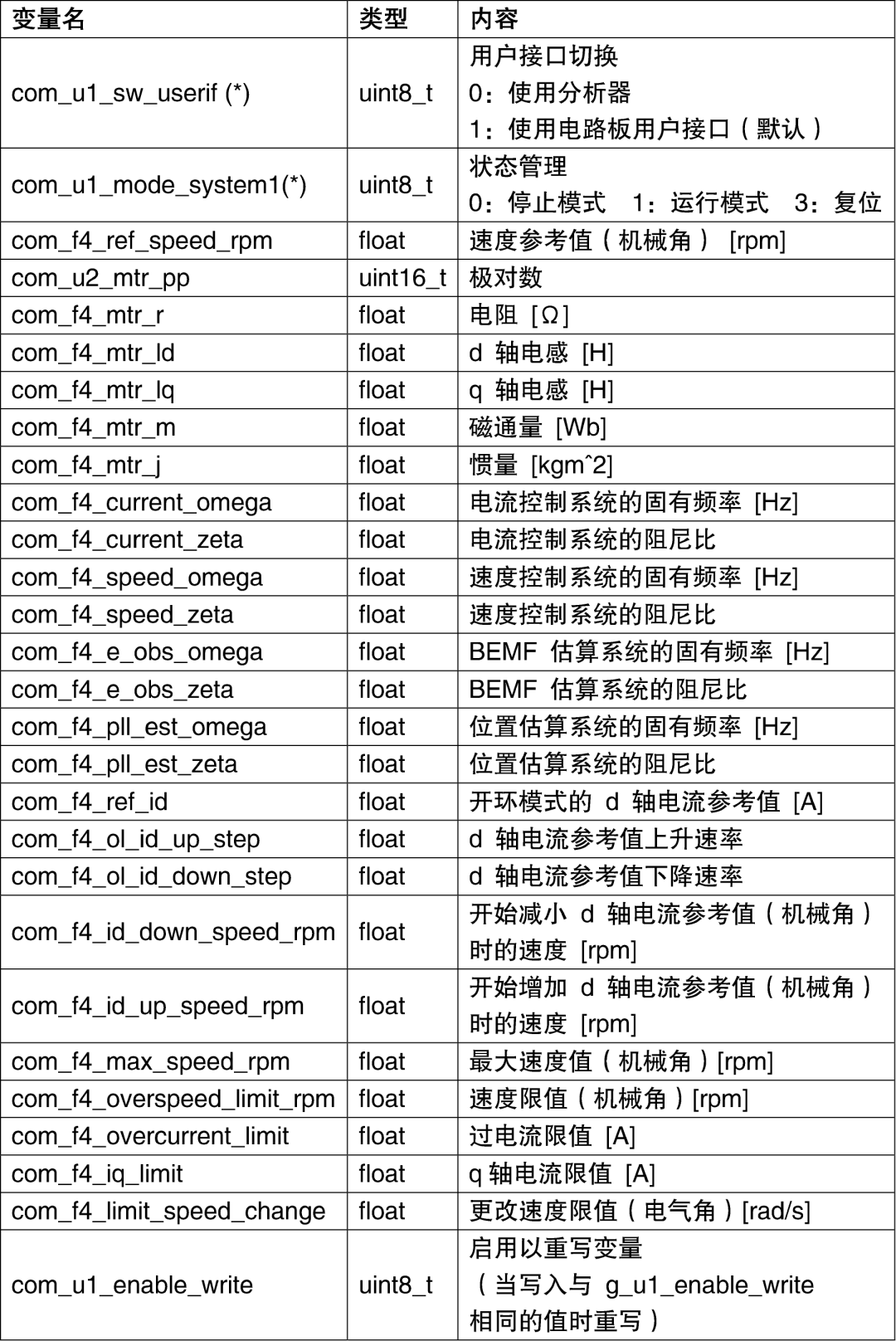
表4-3列出了分析器的變量。當與 g_u1_enable_write 相同的值寫入 com_u1_enable_write 時,這些變量會反映到相應的變量中。但是,帶 (*) 的變量并不依賴于 com_u1_enable_write。
表4-3 分析器變量列表
4.5.4 分析器操作示例
下例說明使用分析器的電機驅動操作。操作使用圖4-4所示的“Control Window”(控制窗口)。關于“Control Window”(控制窗口)的規范,請參見“Renesas Motor Workbench 用戶指南”。
將用戶界面切換到分析器
1、對于“com_u1_sw_userif”標記,選中 [W?] 列的復選框。
2、在“com_u1_sw_userif”的 [Write] 框中輸入“0”。
3、單擊“Write”(寫)按鈕。
驅動電機
1、[W?] 列的復選框中包含
“com_u1_mode_system”
“com_f4_ref_speed_rpm”
“com_u1_enable_write”
對應的復選標記。
2、在“com_f4_ref_speed_rpm”的 [Write] 框中輸入一個參考速度值。
3、單擊“Write”(寫)按鈕。
4、單擊“Read”(讀)按鈕。
選中“com_f4_ref_speed_rpm”和“g_u1_enable_write”對應的 [Read] 復選框。
5、在“com_u1_enable_write”的 [Write] 框中輸入“g_u1_enable_write”的值。
6、在“com_u1_mode_system”的 [Write] 框中輸入“1”。
7、單擊“Write”(寫)按鈕。
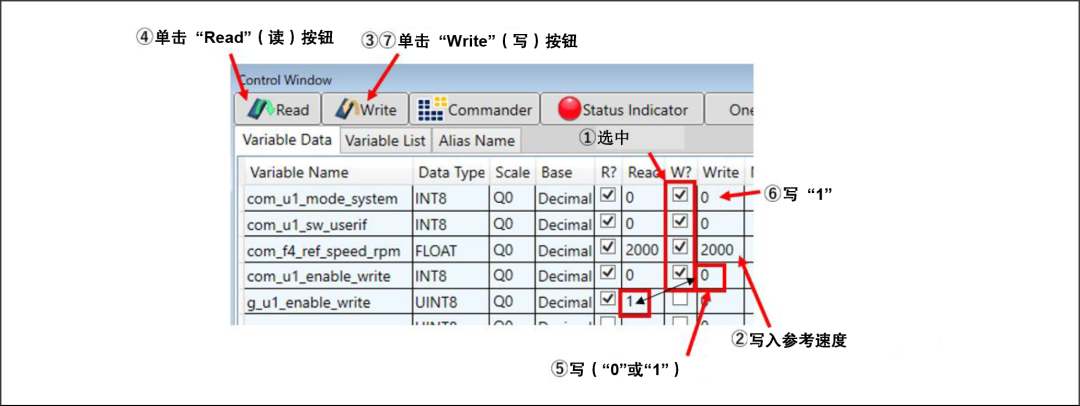
圖4-9 操作步驟 - 驅動電機
停止電機
1、在“com_u1_mode_system”的 [Write] 框中輸入“0”。
2、單擊“Write”(寫)按鈕。
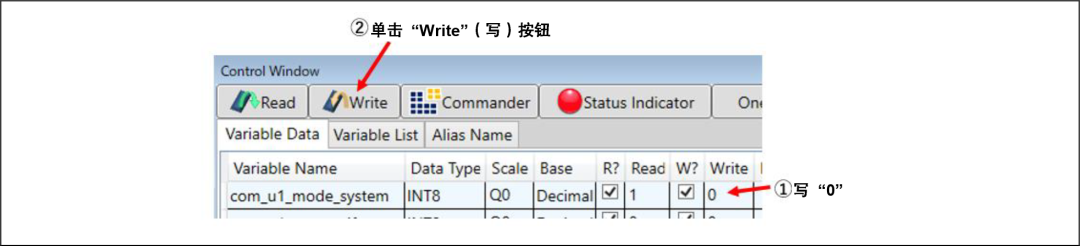
圖4-10 操作步驟 - 停止電機
出錯取消操作
1、在“com_u1_mode_system”的 [Write] 框中輸入“3”。
2、單擊“Write”(寫)按鈕。
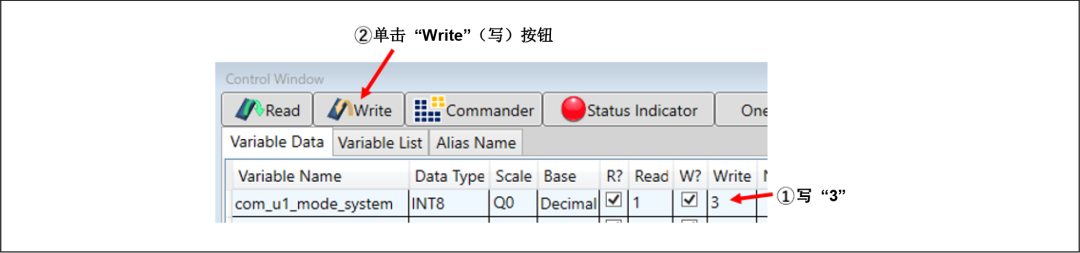
圖4-11 操作步驟 - 出錯取消操作
4.5.5 更改通信速度的示例
通過示例軟件更改Renesas Motor Workbench通信速度的操作步驟如下所述。有關要更改的值,請參見Renesas Motor Workbench用戶手冊。
更改示例軟件的通信速度設置(如果所需通信速率為10 Mbps)
1、按下主窗口上的“Clock”(時鐘)按鈕以將值改為80,000,000
該值的計算方法為將8,000,000乘以10
這是因為,UART通信波特率從1 Mbps改成了10 Mbps。
2、在“COM of Connection”(連接的COM)中選擇所連套件的COM
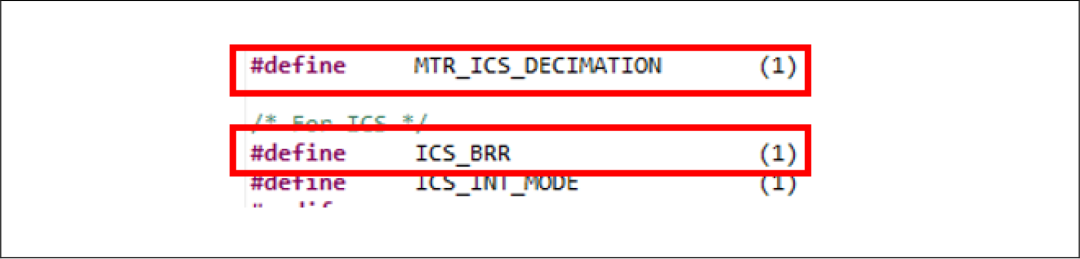
圖4-12 修改 r_mtr_ics.h
更改Renesas Motor Workbench的通信速度設置以實現連接
1、按下主窗口上的“Clock”(時鐘)按鈕將值改為 80,000,000
2、將r_mtr_ics.h中MTR_ICS_DECIMATION的值改為1。
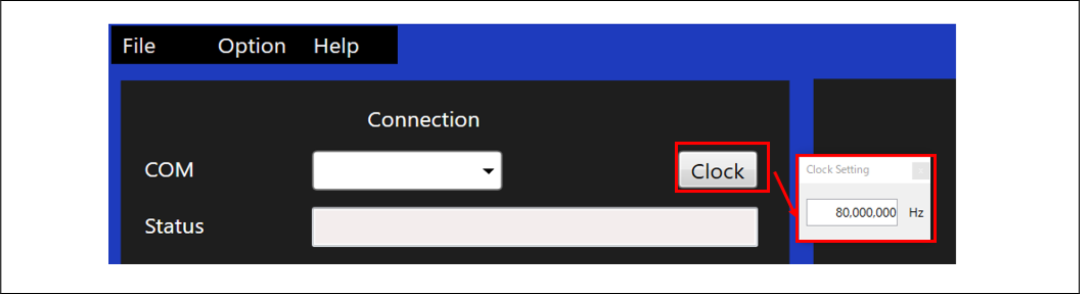
圖4-13 時鐘頻率設置
如果連接失敗,則在復位通信電路板后,重復執行重新連接步驟。
4.5.6 如何使用內置通信庫
通過示例軟件使用內置通信庫而不是通信電路板來連接Renesas Motor Workbench的操作步驟如下所述。
PC與CPU板之間的連接
通過USB/串行轉換板等連接CPU板和PC。
準備一個用于內置通信(例如921600bps)的項目
1、取消注冊ICS2_RA6T2.o
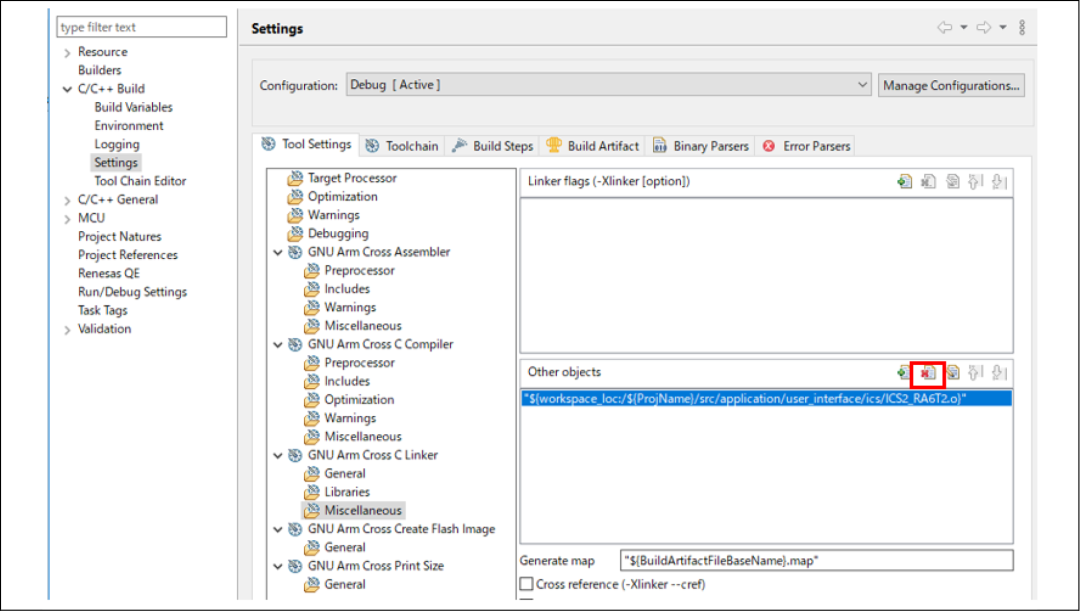
圖4-14 取消注冊ICS2_RA6T2.o
2、注冊ICS2_RA6T2_Built_in.o
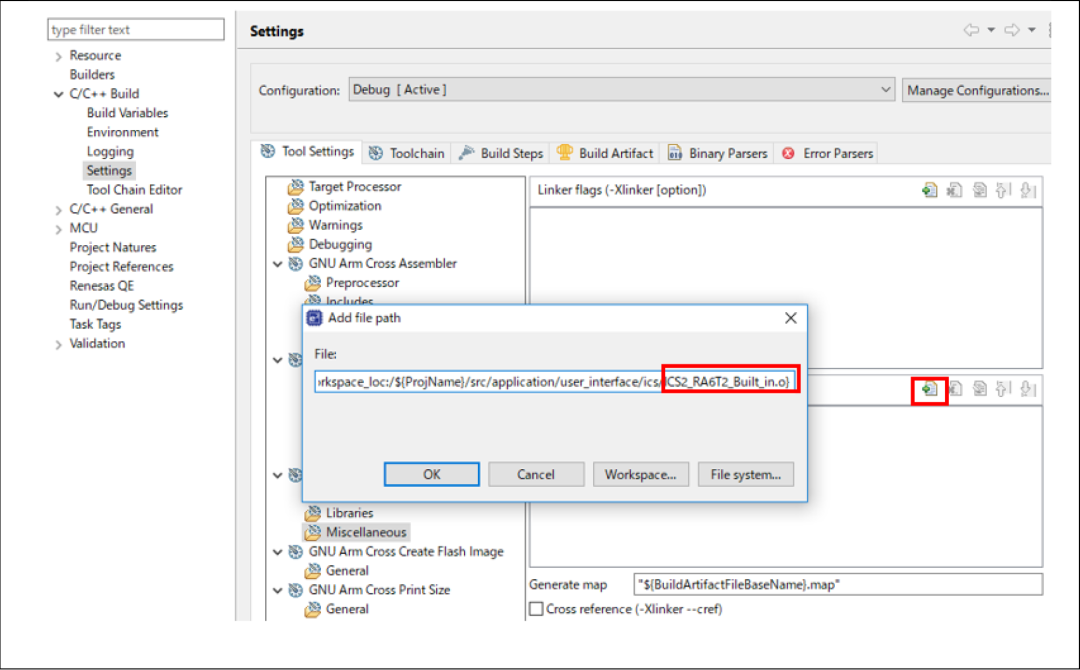
圖4-15 注冊ICS2_RA6T2.o
3、將r_mtr_ics.h中USE_BUILT_IN的值改為1。
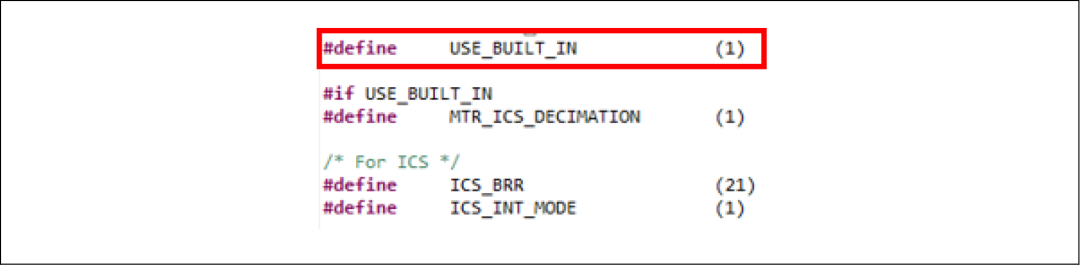
圖4-16 修改r_mtr_ics.h
更改Renesas Motor Workbench的通信波特率設置以實現連接
1、使用主窗口中“Option”(選項)菜單下的“Baud rate”(波特率)對話框將值改為921,600。
2、在“COM of Connection”(連接的COM)中選擇所連套件的COM端口。
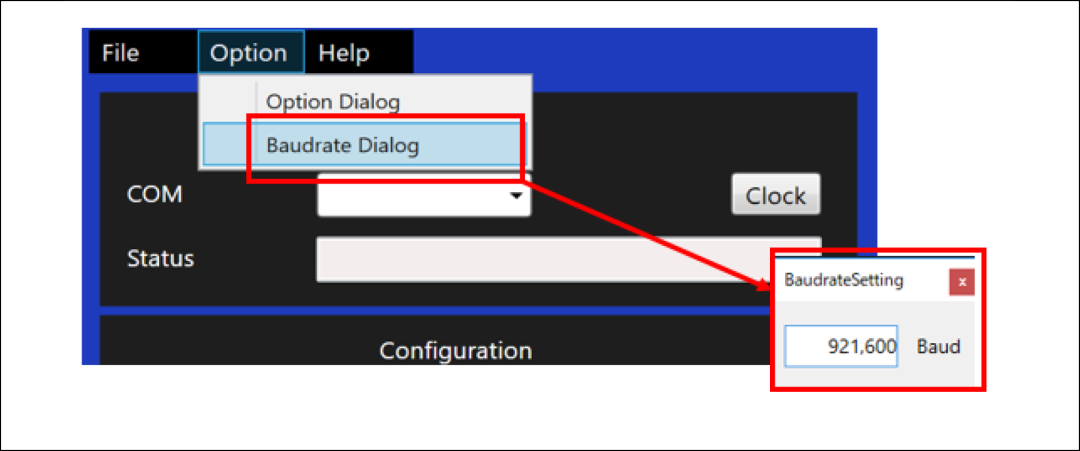
圖4-17 波特率設置
-
傳感器
+關注
關注
2565文章
52916瀏覽量
766627 -
mcu
+關注
關注
146文章
17956瀏覽量
365906 -
控制應用
+關注
關注
0文章
9瀏覽量
6625
發布評論請先 登錄
![<b class='flag-5'>RA6T2</b><b class='flag-5'>無</b><b class='flag-5'>傳感器</b><b class='flag-5'>矢量控制</b>應<b class='flag-5'>用筆記</b> [1] 概述](https://file1.elecfans.com/web2/M00/88/C6/wKgZomRx0tuADg6mAAAB2wBJKv0710.png)
RA6T2無傳感器矢量控制應用筆記 [5] 控制程序描述 (3)
![<b class='flag-5'>RA6T2</b><b class='flag-5'>無</b><b class='flag-5'>傳感器</b><b class='flag-5'>矢量控制</b>應<b class='flag-5'>用筆記</b> [5] <b class='flag-5'>控制</b>程序描述 (3)](https://file1.elecfans.com/web2/M00/88/C5/wKgaomRx0NuAJIP8AAADbu4X9Ec851.gif)
RA6T2無傳感器矢量控制應用筆記 [6] 評估環境說明 (1)
![<b class='flag-5'>RA6T2</b><b class='flag-5'>無</b><b class='flag-5'>傳感器</b><b class='flag-5'>矢量控制</b>應<b class='flag-5'>用筆記</b> [<b class='flag-5'>6</b>] <b class='flag-5'>評估</b><b class='flag-5'>環境</b><b class='flag-5'>說明</b> (1)](https://file1.elecfans.com/web2/M00/89/73/wKgZomSD8FOAf1VwAAAB5Pk5lWI124.png)
RA6T2無傳感器矢量控制應用筆記 [完結篇] 評估環境說明 (2) &參考文檔
![<b class='flag-5'>RA6T2</b><b class='flag-5'>無</b><b class='flag-5'>傳感器</b><b class='flag-5'>矢量控制</b>應<b class='flag-5'>用筆記</b> [<b class='flag-5'>完結篇</b>] <b class='flag-5'>評估</b><b class='flag-5'>環境</b><b class='flag-5'>說明</b> (<b class='flag-5'>2</b>) &參考文檔](https://file1.elecfans.com/web2/M00/89/73/wKgZomSD8G-AfnoYAAABPc7_ZjQ575.png)
RA6T2的16位模數轉換器操作 [5] 配置RA6T2 ADC模塊 (2)
![<b class='flag-5'>RA6T2</b>的16位模數轉換<b class='flag-5'>器</b>操作 [5] 配置<b class='flag-5'>RA6T2</b> ADC模塊 (<b class='flag-5'>2</b>)](https://file1.elecfans.com/web2/M00/BB/1B/wKgZomWXtb6ACk_NAAARMuEl9ZA261.png)
RA6T2的16位模數轉換器操作 [6] 配置RA6T2 ADC模塊 (3)
RA6T2的16位模數轉換器操作 [7] 配置RA6T2 ADC模塊 (4)
RA6T2的16位模數轉換器操作 [8] 配置RA6T2 ADC模塊 (5)
RA6T2的16位模數轉換器操作 [9] 配置RA6T2 ADC模塊 (6)





 工商網監
工商網監
評論