") 增量式編碼器與絕對式編碼器的區(qū)別
增量式編碼器與絕對式編碼器的區(qū)別
概述
編碼器有兩種方式檢測位移和位置信息:相對位置檢測與絕對位置檢測。相對位置的檢測方法為增量式,絕對位置的檢測方法包括絕對式和偽絕對式。相對式和絕對式各有優(yōu)缺點(diǎn),建議大家根據(jù)“測量目的”正確選用。
用什么樣的電信號(hào)來表示位置信息
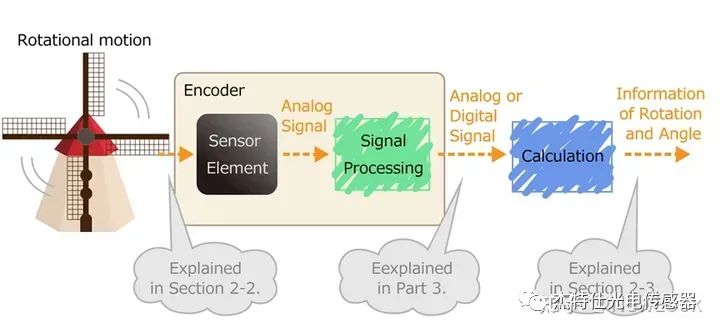
Fig.1 將旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)換為角度信息的過程
在第二部分中,我們解釋了檢測位移與位置的方法分為四種類型。編碼器有兩種方式檢測位移與位置信息:相對位置檢測和絕對位置檢測,并且編碼器輸出的電信號(hào)形式是不同的。相對位置:移動(dòng)過了的角度或位移;絕對位置:當(dāng)前位置與原點(diǎn)位置的距離。
檢測相對位置的增量式
檢測從一個(gè)位置到下一個(gè)位置的移動(dòng)量稱為相對式編碼器。與地圖進(jìn)行類比,是一個(gè)相對位置檢測類型,解釋為“如果你在這條道路上向前走100米,向右走30米,然后就可以找到一家便利店”。相對位置檢測的編碼器根據(jù)位移距離輸出脈沖信號(hào),這種輸出方式稱為增量式。讓我們以第二部分中討論的光電編碼器為例。當(dāng)一個(gè)在徑向上帶有狹縫(孔)的圓盤旋轉(zhuǎn)時(shí),光電編碼器產(chǎn)生脈沖。計(jì)算脈沖的數(shù)量可以看出圓盤的角度變化(運(yùn)動(dòng))。當(dāng)4個(gè)狹縫排列在整個(gè)圓周時(shí),每旋轉(zhuǎn)一圈的脈沖數(shù)為4個(gè),因此可以看出1個(gè)脈沖旋轉(zhuǎn)了360°/4=90°;如果狹縫數(shù)量增加到8個(gè),則一個(gè)脈沖旋轉(zhuǎn)360°/8=45°。如果狹縫的數(shù)量越多,即每旋轉(zhuǎn)一圈產(chǎn)生脈沖的數(shù)量越大,角度變化的分辨率就越高,運(yùn)動(dòng)就能表現(xiàn)得越精細(xì)。
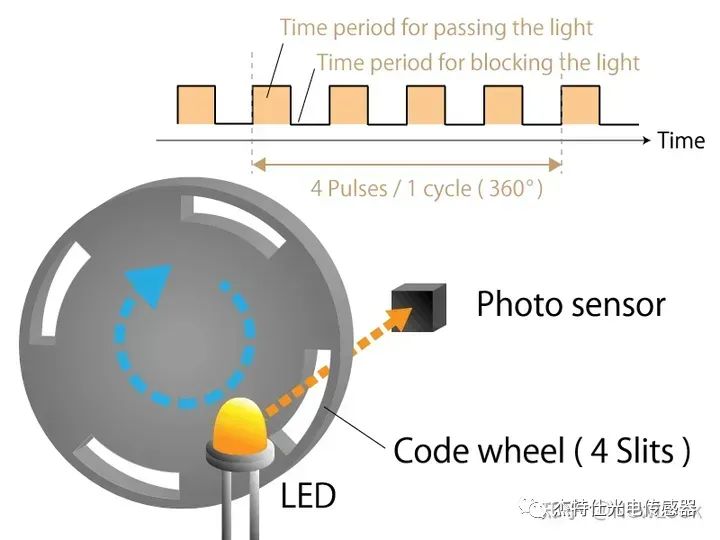
Fig.2a 4-狹縫增量式編碼器
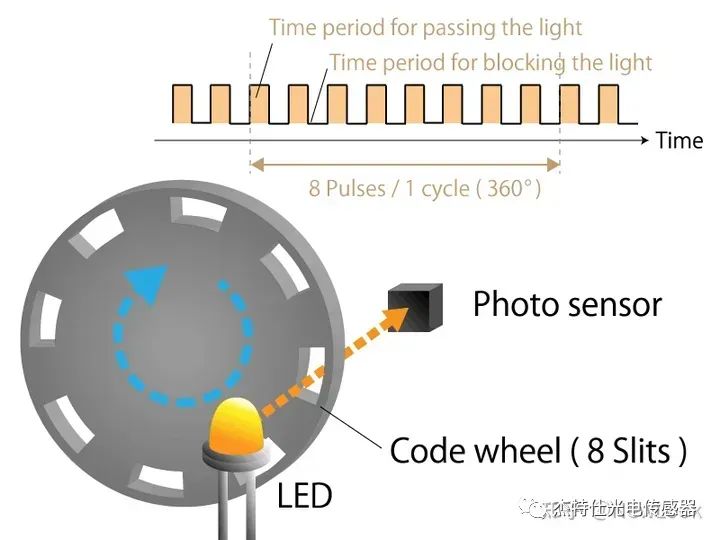
Fig.2b 8-狹縫增量式編碼器
但是,該方法不能識(shí)別旋轉(zhuǎn)方向的變化。因此,使用2個(gè)相位差為90°e的脈沖來解決這個(gè)問題,這2個(gè)脈沖通常被稱為A相脈沖和B相脈沖,旋轉(zhuǎn)方向可以根據(jù)A脈沖或B脈沖哪個(gè)先出現(xiàn)上升沿來確定。通過減去反向旋轉(zhuǎn)的脈沖數(shù),即使過程中旋轉(zhuǎn)方向發(fā)生變化,也可以準(zhǔn)確地確定旋轉(zhuǎn)量。
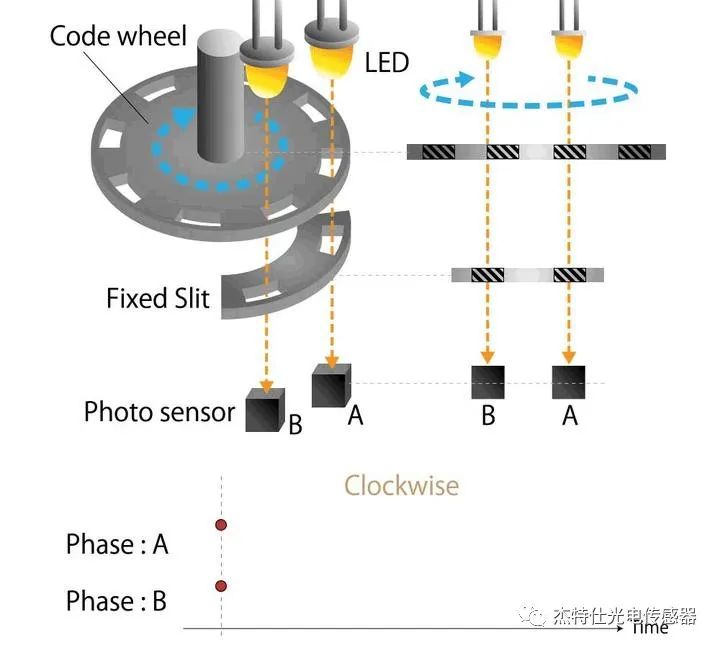
Fig.3a 順時(shí)針旋轉(zhuǎn)AB脈沖波形
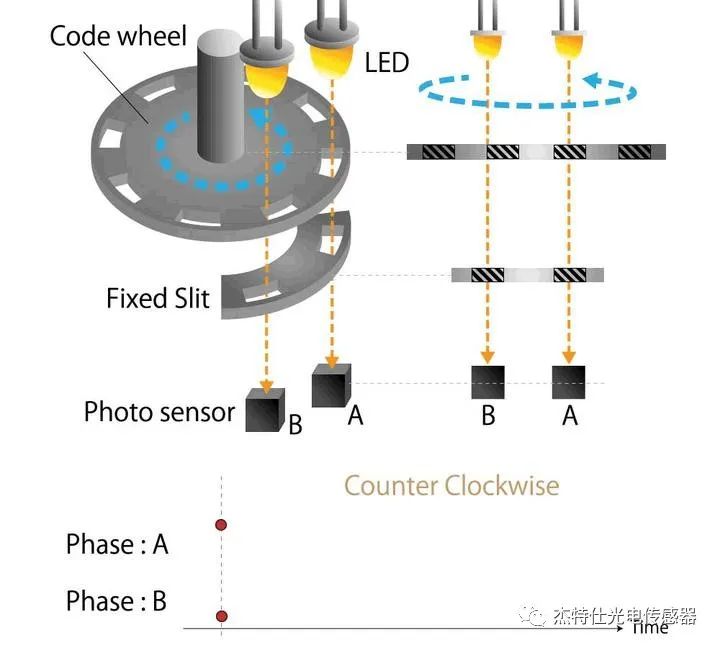
Fig.3b 逆時(shí)針旋轉(zhuǎn)AB脈沖波形
檢測絕對位置的絕對式
直接檢測距離起始位置有多遠(yuǎn)的編碼器稱為絕對式編碼器。與地圖進(jìn)行類比,絕對式編碼器可以直接告訴你在“上海市浦東新區(qū)人民路22弄”有一家便利店。絕對式編碼器響應(yīng)來自微控制器的指令,以串行數(shù)據(jù)或電壓作為輸出傳輸位置信息,這種輸出方式稱為絕對式。我們再次以光電編碼器為例,增量式編碼器只有一排狹縫,而絕對式編碼器則有多排狹縫。例如,如果有4排狹縫,可以用二進(jìn)制碼表示出從0000到1111的16個(gè)角度的絕對位置;如果有5排狹縫,則可表示出從00000到11111的32個(gè)不同角度;通過將狹縫增加到8排,你可以看到從00000000到11111111的256個(gè)不同角度的絕對位置。隨著狹縫排數(shù)的增加,角度變化的分辨率也會(huì)增加,可以更精細(xì)地表示移動(dòng)的角度。
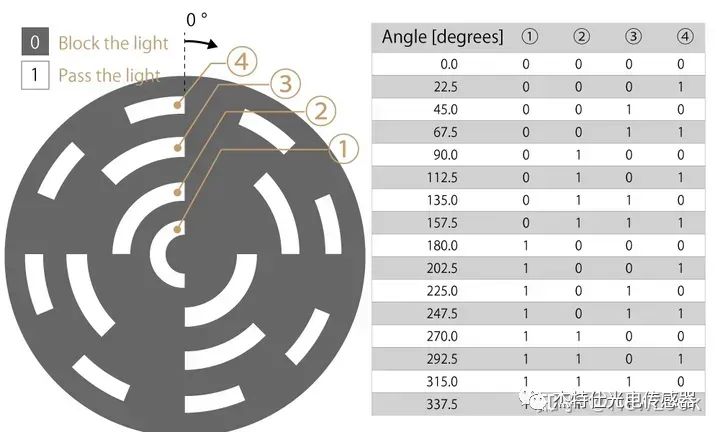
Fig.4a 4排狹縫的絕對式編碼器
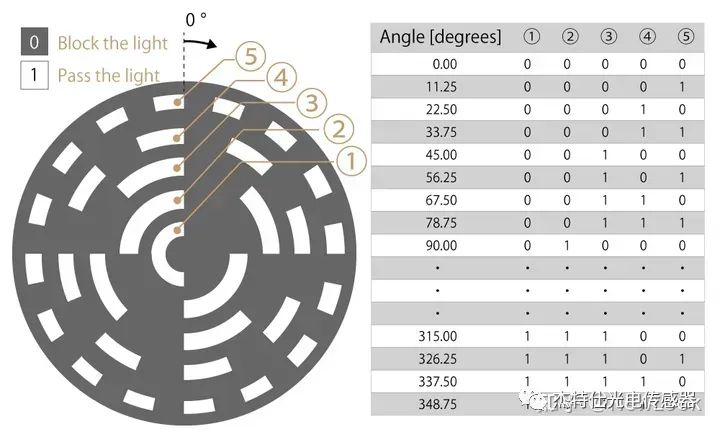
Fig.4b 5排狹縫的絕對式編碼器
Z脈沖信號(hào)檢測絕對角度的偽絕對式
絕對位置也可以用增量的方式來表示。該方法在產(chǎn)生A、B相脈沖狹縫的基礎(chǔ)上,只增加1排狹縫(也只增加1個(gè)),并且每旋轉(zhuǎn)一圈只產(chǎn)生1個(gè)單脈沖,這個(gè)脈沖被稱為Z(Zero)脈沖。偽絕對式是一種通過檢測Z相脈沖的旋轉(zhuǎn)量來檢測絕對位置的方法,Z相脈沖是A相和B相脈沖的起始位置。
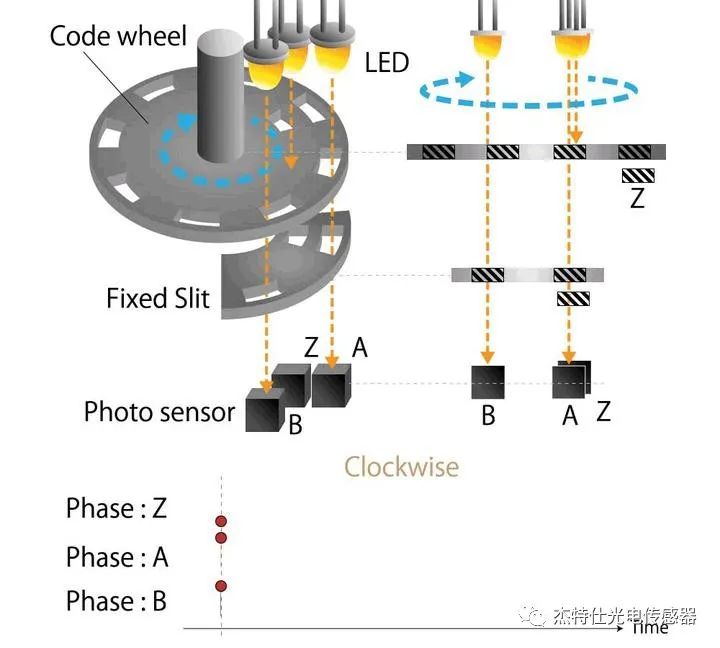
Fig.5a 順時(shí)針旋轉(zhuǎn)ABZ脈沖
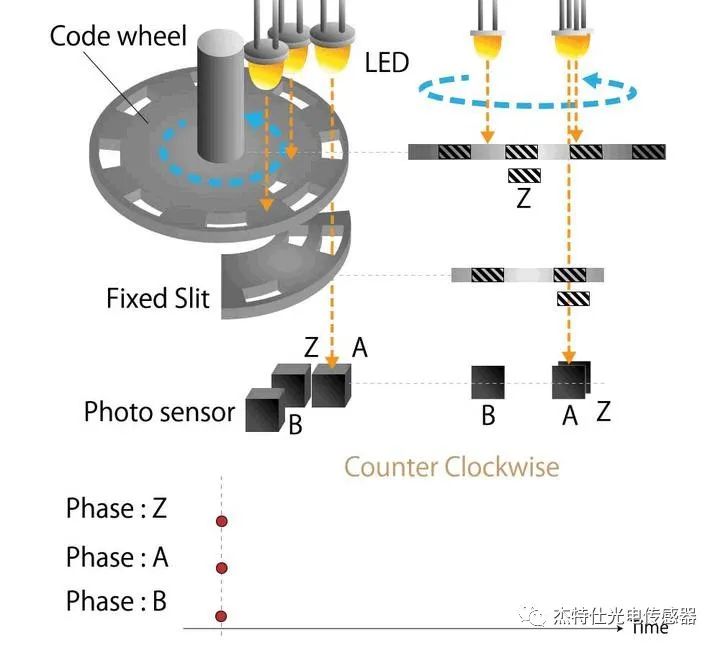
Fig.5b 逆時(shí)針旋轉(zhuǎn)ABZ脈沖
增量式和絕對式的優(yōu)缺點(diǎn)增量式編碼器和絕對式編碼器各有利弊。檢測相對位置的增量式編碼器只有一排狹縫(偽絕對式為兩排),因此可以用更低的成本制造碼盤。但是,檢測絕對位置的絕對式編碼器,狹縫是多排的,所以如果想要增加角度變化的分辨率,那么碼盤的制造成本將是昂貴的。如果在斷電后重新啟動(dòng),絕對式可以檢測到重新啟動(dòng)時(shí)的位置。但是在使用增量式和偽絕對式的情況下,由于累計(jì)角度已經(jīng)被刪除,無法檢測到重啟時(shí)的位置。另外,由于信號(hào)傳輸系統(tǒng)的原因,絕對式也是有利有弊。在絕對式編碼器中有兩種輸出方式,一種是將二進(jìn)制碼作為數(shù)字信號(hào)輸出;另一種是將二進(jìn)制碼轉(zhuǎn)換為模擬電壓并輸出。此外,對于數(shù)字信號(hào)也是有兩種輸出方式的,一種是并行輸出,通過多個(gè)信號(hào)線從多個(gè)狹縫中得到的二進(jìn)制代碼原樣輸出;另一種是串行輸出,使用一個(gè)信號(hào)線傳輸,同時(shí)將并行輸出的多個(gè)信號(hào)轉(zhuǎn)換為串行數(shù)據(jù),并隨時(shí)間順序依次傳輸。
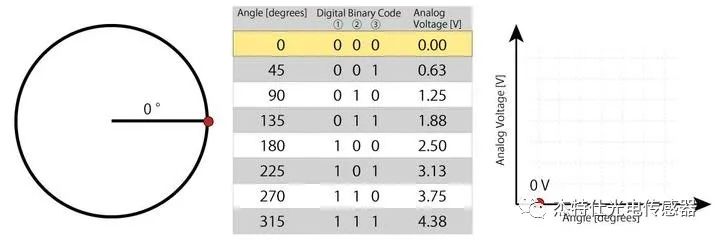
Fig.6 角度信息、數(shù)字輸出信號(hào)的二進(jìn)制編碼和模擬輸出電壓之間的關(guān)系
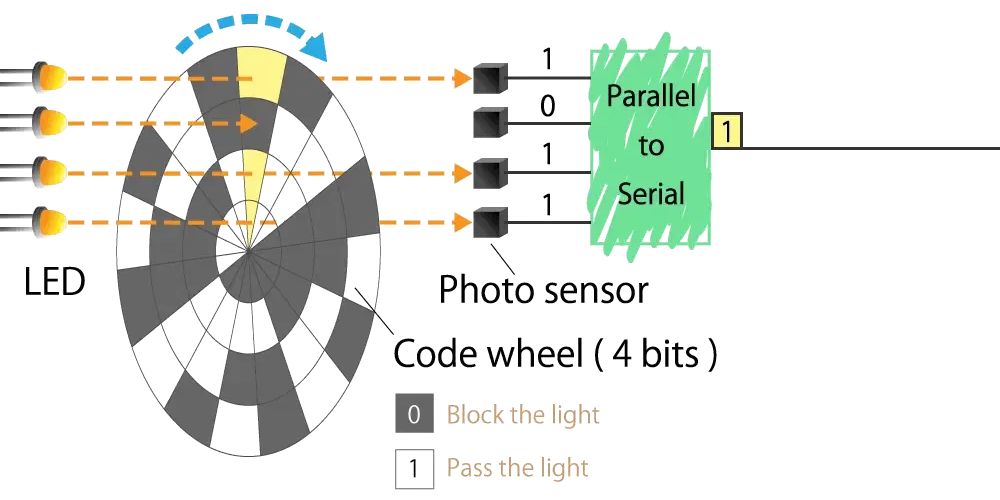
Fig.7 并行輸出信號(hào)和串行轉(zhuǎn)換輸出信號(hào)
數(shù)字信號(hào)在傳輸過程中具有抗噪聲能力強(qiáng)的優(yōu)點(diǎn)。然而,并行輸出的缺點(diǎn)是增加了信號(hào)線的數(shù)量,由于串行輸出需要時(shí)間通信,所以如果電機(jī)旋轉(zhuǎn)運(yùn)動(dòng)時(shí),輸出的位置信息可能偏離當(dāng)前位置。模擬信號(hào)具有無時(shí)延、只需一條信號(hào)傳輸線的優(yōu)點(diǎn),但其缺點(diǎn)是在傳輸過程中容易受到噪聲的影響。如上所述,相對式編碼器和絕對編碼器各有優(yōu)缺點(diǎn),一定要根據(jù)應(yīng)用情況選擇檢測類型。例如,檢測電機(jī)軸或機(jī)器人手臂的旋轉(zhuǎn)角度是需要絕對的角度,檢測電機(jī)的轉(zhuǎn)子磁極則只需要相對的角度。建議您根據(jù)“檢測目的”來選用增量式編碼器或絕對式編碼器。
總結(jié)
編碼器有兩種方式表示位移和位置信息:相對位置檢測與絕對位置檢測。相對位置的檢測方法為增量式,絕對位置的檢測方法包括絕對式和偽絕對式。相對式和絕對式各有優(yōu)缺點(diǎn),建議大家根據(jù)“測量目的”正確選用。
-
傳感器
+關(guān)注
關(guān)注
2562文章
52524瀏覽量
763489 -
編碼器
+關(guān)注
關(guān)注
45文章
3772瀏覽量
137084 -
絕對式編碼器
+關(guān)注
關(guān)注
2文章
23瀏覽量
8761 -
增量式編碼器
+關(guān)注
關(guān)注
2文章
39瀏覽量
12862
原文標(biāo)題:《編碼器基礎(chǔ)知識(shí)》之增量式與絕對式區(qū)別
文章出處:【微信號(hào):旺材伺服與運(yùn)動(dòng)控制,微信公眾號(hào):旺材伺服與運(yùn)動(dòng)控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
增量式光電編碼器
增量式編碼器和絕對式編碼器的區(qū)別 #自動(dòng)化 #plc培訓(xùn) #零基礎(chǔ)學(xué)自動(dòng)化#硬聲創(chuàng)作季









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論