") Pico W基于C/C++ SDK適配RT-Thread Wi-Fi經(jīng)驗(yàn)總結(jié)
Pico W基于C/C++ SDK適配RT-Thread Wi-Fi經(jīng)驗(yàn)總結(jié)
前言:
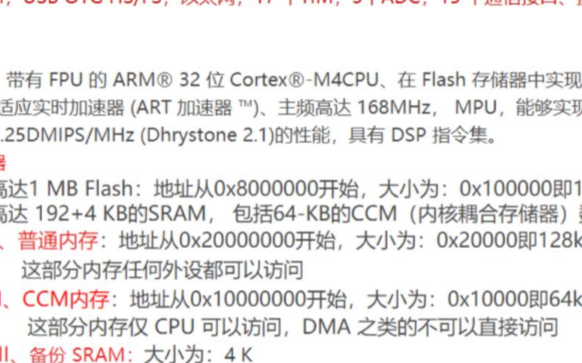
Pico W 作為 Raspberry Pi Pico 的衍生版本,主要增加了無(wú)線通信的功能,通過(guò)搭載 CYW43439 無(wú)線芯片,支持 2.4 GHz Wi-Fi 4 及藍(lán)牙5.0 ,其余和 Raspberry Pi Pico 基本相同,外部引腳也相互兼容。
也可以參考我之前文章中介紹的使用 Clion 搭建開(kāi)發(fā)調(diào)試下載環(huán)境,同樣適用。這里需要注意的一點(diǎn)是,當(dāng)你首次燒錄使板載 LED 閃爍的程序時(shí),開(kāi)發(fā)板可能沒(méi)有相應(yīng)的現(xiàn)象,這可能不是你下載失敗了,也不是你的開(kāi)發(fā)板是壞的,而是 Pico W 的板載 LED 由無(wú)線模塊控制
準(zhǔn)備工作
開(kāi)發(fā)環(huán)境搭建完成后,接下來(lái)就可以根據(jù)樹(shù)莓派官方的 SDK 和 Example 調(diào)一調(diào)程序,逐漸梳理清楚邏輯和各模塊之間的依賴(lài)關(guān)系。例如先運(yùn)行一個(gè)最簡(jiǎn)單的 Wi-Fi scan 的示例程序,其主要邏輯是先 cyw43_arch_init() 初始化模塊,再通過(guò) cyw43_arch_enable_sta_mode() 使能為 STA 模式,最后使用cyw43_wifi_scan() 開(kāi)始掃描并注冊(cè)掃描完成回調(diào)函數(shù)打印掃描結(jié)果,整體的邏輯和 API 還是很簡(jiǎn)潔明了的。
開(kāi)始開(kāi)發(fā)
主要有以下三種類(lèi)型:poll , threadsafe_background, freertos 。poll 是需要用戶定期調(diào)用的,并且不保證線程安全性;threadsafe_background 和 freertos 能夠保證線程安全性,threadsafe_background 不使用 RTOS,通過(guò)低優(yōu)先級(jí)的 ISR 實(shí)現(xiàn)調(diào)度同步,freertos 是通過(guò)專(zhuān)門(mén)的線程處理調(diào)動(dòng)同步。
一開(kāi)始我選擇的是基于 threadsafe_background 進(jìn)行開(kāi)發(fā),通過(guò)參照以上 Cmake 關(guān)系圖很快就成功在 RT-Thread 的 Bsp 中復(fù)現(xiàn)了 Wi-Fi scan 示例程序。但是開(kāi)發(fā)后續(xù)需要使用 lwip 的功能時(shí),與 RT-Thread 就產(chǎn)生了很多沖突。
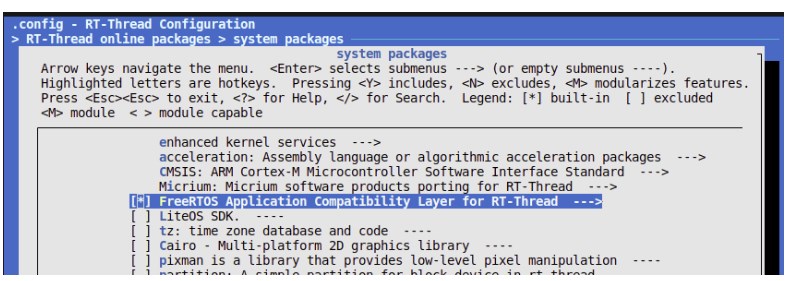
想要更好的適配 RT-Thread 還是得按照 RTOS 的來(lái),于是開(kāi)始復(fù)現(xiàn)官方提供的基于 FreeRTOS 的,首先想到的是使用 RT-Thread 的 FreeRTOS 兼容層軟件包,在 menuconfig 中使能即可:
引入兼容層后大部分報(bào)錯(cuò)消失了,但報(bào)錯(cuò)沒(méi)有 portCHECK_IF_IN_ISR 的相關(guān)實(shí)現(xiàn),在 FreeRTOS 的源碼中查找發(fā)現(xiàn)其為 RP2040 特有的實(shí)現(xiàn)。其是用于判斷上下文環(huán)境是否處于中斷中,改為 RT-Thread 中的檢測(cè)中斷 nest 是否大于 0 即可。
成功編譯下載程序后,卻因?yàn)?a href="http://www.asorrir.com/tags/定時(shí)器/" target="_blank">定時(shí)器進(jìn)入了 hardfault ,檢查發(fā)現(xiàn) FreeRTOS 兼容層中的 portMAX_DEALY 對(duì)接錯(cuò)了,不是 RT_TICK_MAX ,應(yīng)該為 RT_TICK_MAX / 2 - 1(韋東山老師在rtt開(kāi)發(fā)者大會(huì)上專(zhuān)門(mén)講解過(guò) RTT 優(yōu)雅的定時(shí)器算法,感興趣可以看看)這個(gè)問(wèn)題目前已經(jīng)修復(fù)了。
之后程序還是進(jìn)入 hardfault ,一直 debug 對(duì)比代碼沒(méi)有發(fā)現(xiàn)問(wèn)題,再次分析對(duì)比 FreeRTOS 和 RT-Thread 之間的差異,兩者的優(yōu)先級(jí)等級(jí)和數(shù)值的關(guān)系是相反的,檢查發(fā)現(xiàn) async_context_task 線程的優(yōu)先級(jí)為 tskIDLE_PRIORITY + 4 在 FreeRTOS 中優(yōu)先級(jí)比空閑線程高4,但在 RT-Thread 中因?yàn)閮?yōu)先級(jí)太低,得不到調(diào)度,造成死鎖問(wèn)題。解決辦法是將其線程優(yōu)先級(jí)提高。
移植 RT-Thread
以上的示例程序跑通以后,就開(kāi)始將 wifi freertos 的相關(guān)的文件移植為 RT-Thread 。主要包含以下內(nèi)容:
替換頭文件:
用 RT-Thread 的頭文件替換 FreeRTOS 的頭文件。
修改任務(wù)創(chuàng)建和管理:
使用 RT-Thread 的任務(wù)創(chuàng)建和管理 API 替代 FreeRTOS 的任務(wù) API。
注意 RT-Thread 的任務(wù)入口函數(shù)參數(shù)和返回值的差異。
修改互斥鎖:
替換 xSemaphoreCreateRecursiveMutex 為 RT-Thread 提供的互斥鎖創(chuàng)建 API。
替換 xSemaphoreTakeRecursive 和 xSemaphoreGiveRecursive 為 RT-Thread 互斥鎖的 API。
替換定時(shí)器:
使用 RT-Thread 的軟定時(shí)器或者實(shí)時(shí)時(shí)鐘服務(wù)替代 FreeRTOS 定時(shí)器。
任務(wù)通知:
替換 FreeRTOS 的任務(wù)通知 API 為 RT-Thread 的事件和信號(hào)量等。
任務(wù)掛起和喚醒:
替換 FreeRTOS 的 vTaskSuspend 和 vTaskResume 為 RT-Thread 的任務(wù)掛起和喚醒 API
主要涉及 async_context_rtthread,cyw43_arch,cyw43_arch_rtthread,lwip_rtthread這些文件,基礎(chǔ)的移植完成后,就可以開(kāi)始將其對(duì)接到 RT-Thread 的 Wi-Fi 設(shè)備驅(qū)動(dòng)框架了,主要參考 rw007 和 cyw43012-RTT 的對(duì)接。需要使能 RT-Thread 的 lwip 和 SAL 等組件。
需要注意的一點(diǎn)是 RT-Thread 的 lwip 組件使能后,已經(jīng)包含了 lwip 的初始化,cyw43_arch_init() 中的 lwip 初始化相關(guān)注釋即可,否則重復(fù)初始化會(huì)因?yàn)橥瓿闪繜o(wú)法獲取造成阻塞。
#if CYW43_LWIP
// ok &= lwip_rtthread_init(context);
#endif
// 重復(fù)初始化信號(hào)量無(wú)法獲取造成阻塞
bool lwip_rtthread_init(async_context_t *context) {
RT_ASSERT(!lwip_context);
lwip_context = context;
static bool done_lwip_init;
if (!done_lwip_init) {
done_lwip_init = true;
rt_sem_t init_sem = rt_sem_create("lwip_init_sem", 0, RT_IPC_FLAG_PRIO);
tcpip_task_blocker = rt_sem_create("tcpip_task_blocker", 0, RT_IPC_FLAG_PRIO);
tcpip_init(tcpip_init_done, init_sem);
// 阻塞在信號(hào)量獲取
rt_sem_take(init_sem, RT_TICK_MAX / 2 - 1);
rt_sem_delete(init_sem);
} else {
rt_sem_release(tcpip_task_blocker);
}
return true;
}
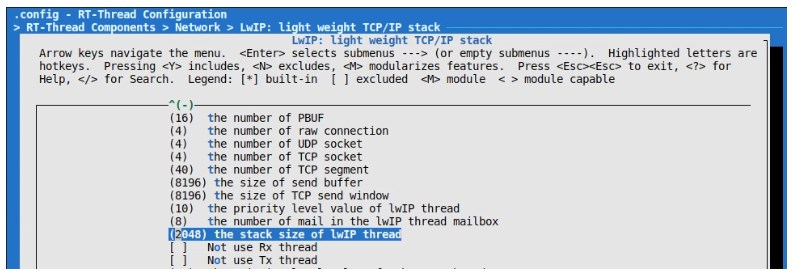
運(yùn)行過(guò)程中可能會(huì)報(bào)錯(cuò)提示 lwip 線程棧空間不足,在 menuconfig 中適當(dāng)改大即可
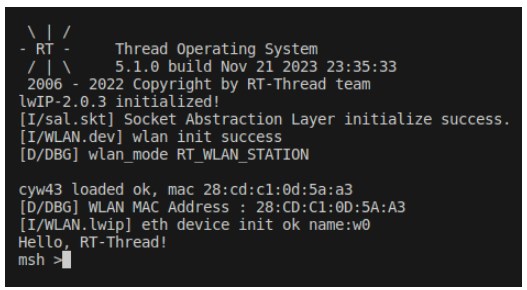
對(duì)接完成后測(cè)試功能,使能為 STA 模式,日志中顯示 mac 地址
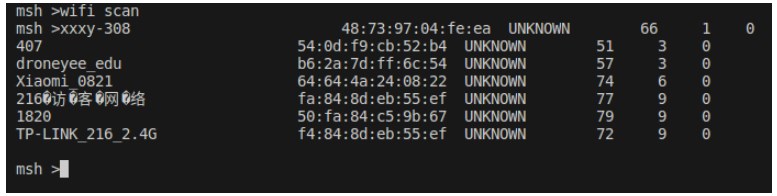
掃描附近ap
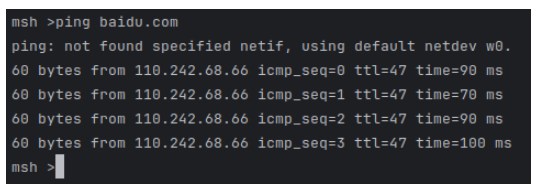
連接ap并成功ping通
測(cè)試ap功能,使能為AP模式,設(shè)置名稱(chēng)及pwd,可以使用手機(jī)成功連接。
注意事項(xiàng)
使用pico w的無(wú)線模塊需要使用一些相關(guān)的宏定義,如無(wú)線模塊的引腳定義等,其定義在 picow.h 中。但程序默認(rèn)包含的是 pico.h 。可以通過(guò)定義宏 PICO_CONFIG_HEADER=boards/pico_w.h 進(jìn)行切換。
吞吐量還未進(jìn)行測(cè)試。
目前基于 C/C++ SDK 的開(kāi)發(fā)案例較少,推薦直接閱讀官方文檔。
在對(duì)接設(shè)備驅(qū)動(dòng)框架 wifi_join 方法時(shí)苦惱于 ap 的 channel 和 bssid 沒(méi)有正常傳遞,查看源碼發(fā)現(xiàn)使能 RT_WLAN_JOIN_SCAN_BY_MGNT
這個(gè)宏可以先掃描ap,并傳遞包含 channel 和 bssid 的 info,但要將以下改為rt_memcpy
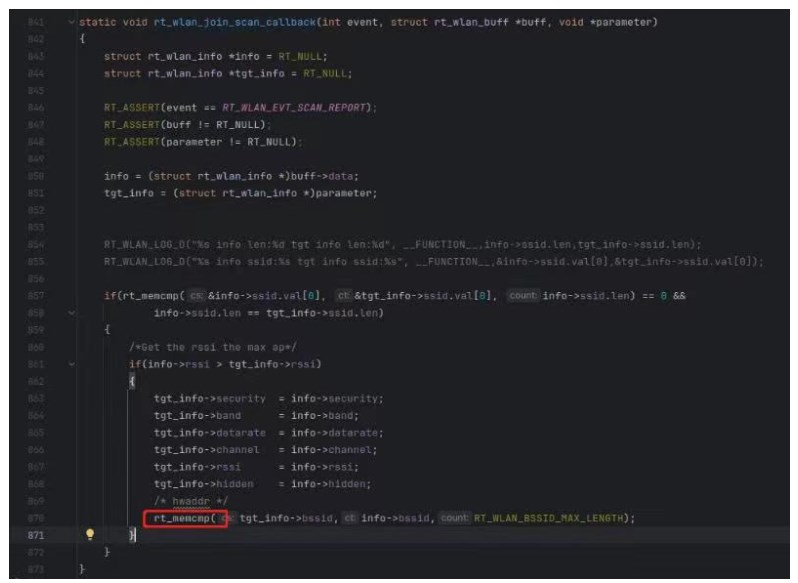
個(gè)人理解,沒(méi)有找到其他的說(shuō)明和用例。(不過(guò)最后發(fā)現(xiàn),連接ap沒(méi)有 channel 和 bssid 也行,直接設(shè)置為 RT_NULL )
-
無(wú)線通信
+關(guān)注
關(guān)注
58文章
4705瀏覽量
144847 -
LED控制
+關(guān)注
關(guān)注
0文章
39瀏覽量
17100 -
Wi-Fi技術(shù)
+關(guān)注
關(guān)注
0文章
59瀏覽量
8497 -
RT-Thread
+關(guān)注
關(guān)注
32文章
1368瀏覽量
41499
發(fā)布評(píng)論請(qǐng)先 登錄
BL808 RT-Thread Wi-Fi 驅(qū)動(dòng)適配
RT-Thread的C語(yǔ)言編碼規(guī)范
BL808 RT-Thread Wi-Fi驅(qū)動(dòng)適配
【每日精選】開(kāi)源鴻蒙系統(tǒng)DAYU200教程及Tina Wi-Fi模組移植
RT-Thread實(shí)戰(zhàn)筆記資料匯總
【BPI-Pico-RP2040 開(kāi)發(fā)板】+Pico運(yùn)行RT-Thread
嵌入式 | 如何在搭載了RT-Thread系統(tǒng)的STM32平臺(tái)上使用C++?
如何使用在搭載了RT-Thread系統(tǒng)的STM32平臺(tái)上使用C++

基于STM32F4和RT-Thread通用BootLoader使用經(jīng)驗(yàn)
如何在搭載了RT-Thread系統(tǒng)的STM32平臺(tái)上使用C++?

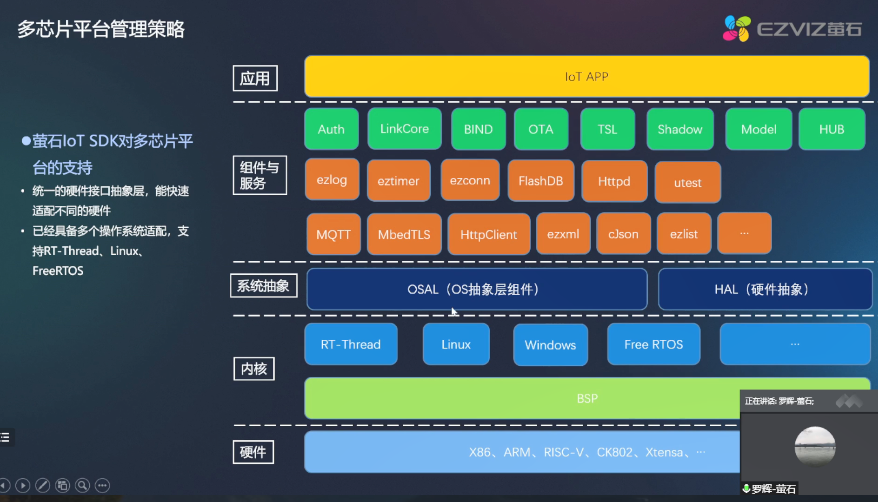
2022 RT-Thread全球技術(shù)大會(huì):螢石EZIOT SDK對(duì)RT-Thread的支持
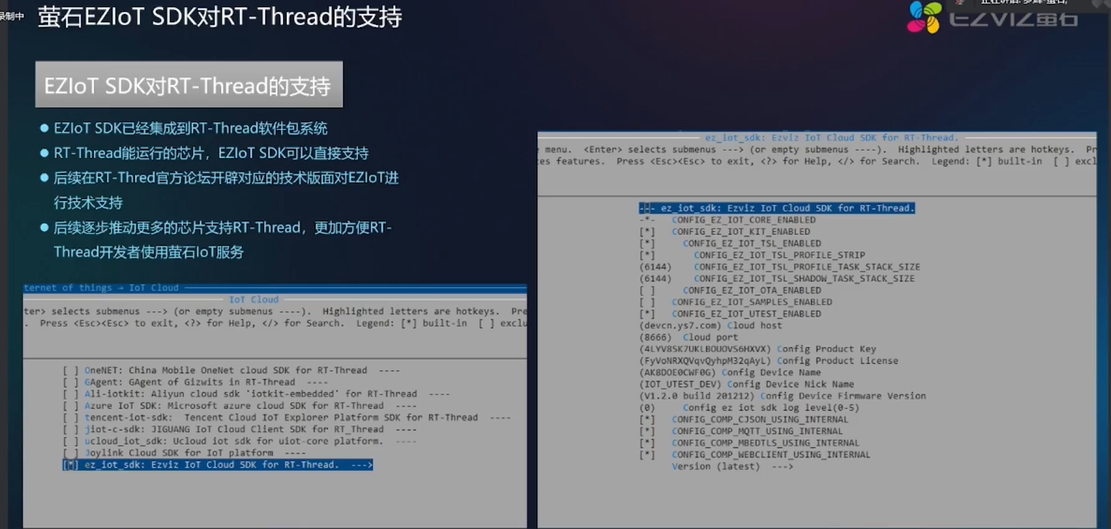
RT-Thread全球技術(shù)大會(huì):螢石EZloT SDK對(duì)RT-Thread的支持以及多芯片平臺(tái)管理策略
【經(jīng)驗(yàn)總結(jié)】一位近10年的嵌入式開(kāi)發(fā)老手,到底是如何快速學(xué)習(xí)和使用RT-Thread的?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論