 MIMO雷達天線陣列設計
MIMO雷達天線陣列設計
一部帶有一個發射機和一個接收機的雷達可以根據發射電磁波的往返時間來測量目標的距離,但不能測量目標的角度。一個簡單的獲取角度信息的方法是使用具有窄波束的天線進行機械旋轉。但為了實現窄波束,需要一個大的天線,旋轉大天線需要很大的空間,并且無法同時成像整個視場。
除了旋轉單個天線,還可以采用相控陣雷達,利用多個天線形成雷達圖像,無需物理旋轉。MIMO雷達則是帶有多個發射和接收天線的相控陣雷達。使用的天線越多,雷達的角度分辨率就越好。
MIMO雷達天線陣列設計基礎
要知道目標的角度需要多個天線,這些天線位于略微不同的位置,因此在不同的時間接收信號。根據雷達回波到達每個天線的時間差,可以解出目標的角度。根據實際情況,與其使用需要極好時間分辨率的絕對時間差,不如使用接收到的信號的相位。
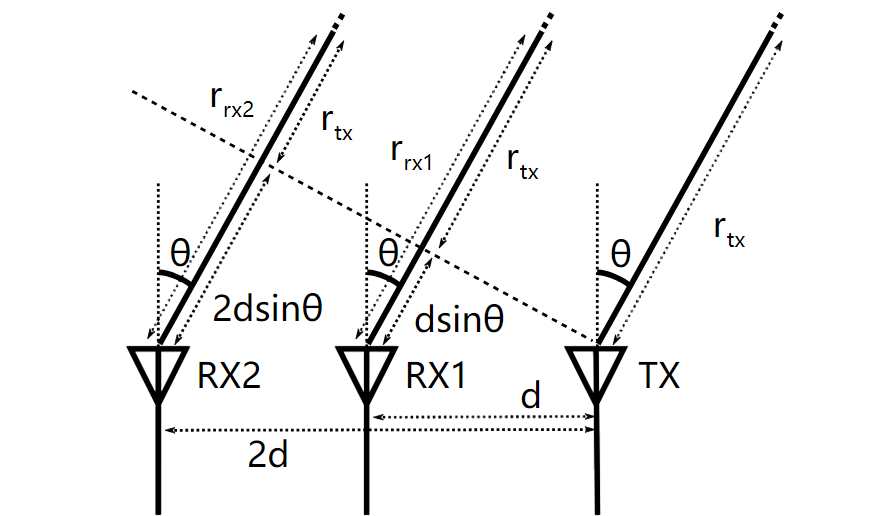
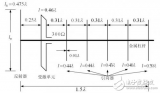
假設目標非常遠,每個天線到目標的角度可以假定為相同,那么雷達波形到每個天線的距離如圖1所示意。為了簡化,另外假設天線陣元到目標的距離差小于雷達的距離分辨率。
雷達波形所經歷的距離是從TX天線到目標的距離加上從目標返回到RX天線的距離:
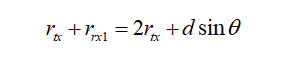
由于多個接收天線與發射機之間的距離不同,雷達波形的行走距離稍有不同,這便可以用來求解目標的角度。
在RX天線處接收到的來自一個目標的信號形式為:
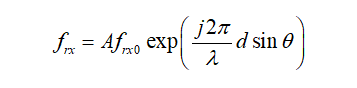
A是接收信號的幅度,frx0是在發射天線處接收到的回波。指數項是相移,它取決于到目標的距離r和輻射信號的波長λ=c/f。復數用于使分析在數學上更簡單,實際測量的信號是實值的,因此只有表達式的實部會被測量。
對于一個目標,兩個接收天線在不同的距離,目標的角度可以通過比較在兩個接收天線處接收到的信號的相位差來確定。在距離d和2d的兩個天線處接收到的信號的相位差是exp(2πjdsinθ/λ),目標的角度可以從表達式中解出。為了有一個唯一的解,距離d需要小于λ/2,否則由于sin的周期性,可能在兩個或更多的角度獲得相同的相位。
當有多個目標時,情況會變得復雜。不同目標的反射信號在接收機上求和,只能測量到求和后的信號。對于一個目標,所有天線的信號幅度都是一樣的,但對于多個目標,則不是這樣。
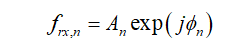
雷達波形frx0從接收機信號中解調出來后,每個接收機的輸出形式是:
匹配濾波是確定每個角度是否有目標的最優線性濾波器。在這種情況下,匹配濾波器是從特定角度的單個目標觀察到的信號:

目標分布可以計算為:

設置frx,n=1,可以得到零角度的單個目標的目標響應。
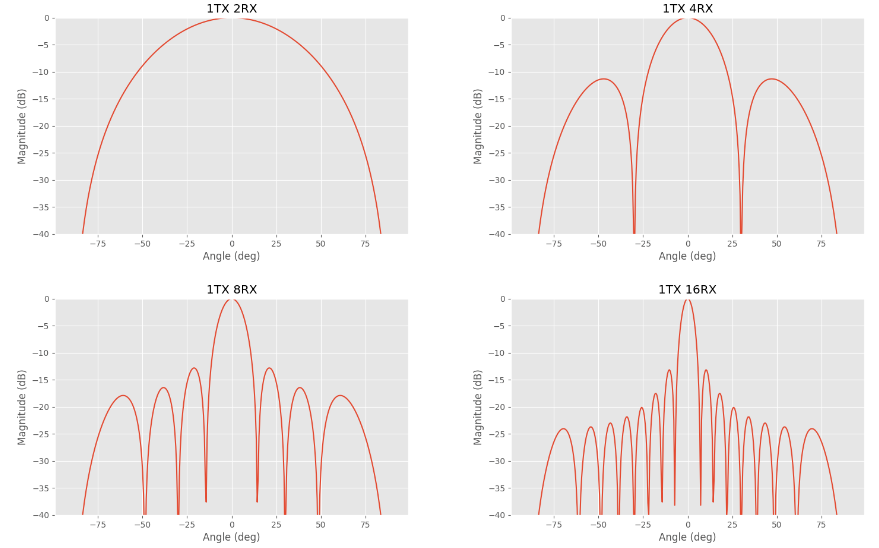
下圖顯示了具有單個發射機和不同數量接收機的陣列的目標響應。需要很多天線才能得到一個不錯的角度分辨率。即使有16個接收機,-3 dB的角度分辨率也只有6度。旁瓣可以通過加權調整。如果沒有權重,第一旁瓣位于-13 dB左右。
審核編輯:湯梓紅
-
接收機
+關注
關注
8文章
1218瀏覽量
54213 -
發射機
+關注
關注
7文章
511瀏覽量
48447 -
MIMO雷達
+關注
關注
1文章
20瀏覽量
9575 -
雷達天線
+關注
關注
1文章
30瀏覽量
15295 -
天線陣列
+關注
關注
0文章
25瀏覽量
7698
原文標題:MIMO雷達天線陣列設計基礎(1)
文章出處:【微信號:雷達通信電子戰,微信公眾號:雷達通信電子戰】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
5G大規模MIMO天線陣列3D OTA測試
MIMO雷達簡介
射頻仿真系統的天線陣列怎么校準?
怎么測量天線陣列系統的插入損耗和插入相移變化量?
汽車雷達:陣列天線設計步驟
如何使用HFSS設計5G天線陣列?
超寬帶時域天線陣列延時控制掃描實驗
P波段瞬態極化雷達收發天線陣列設計解析
采用多方向天線陣列技術實現微帶陣列天線的設計
后摩爾時代,從有源相控陣天線走向天線陣列微系統





 工商網監
工商網監
評論