") 高速數(shù)字化儀和AWG在車(chē)輛總線(CAN/LIN/PSI5)測(cè)試中的應(yīng)用(二)
高速數(shù)字化儀和AWG在車(chē)輛總線(CAN/LIN/PSI5)測(cè)試中的應(yīng)用(二)
前情回顧
上期德思特向大家介紹了德思特模塊化數(shù)字化儀在車(chē)輛測(cè)試中的應(yīng)用,8到16位的通道,高達(dá)5 GS/s的采樣率允許選擇與應(yīng)用相匹配的快速或慢速采樣,即使缺少組件,它們也可以進(jìn)行測(cè)試。這期將為大家介紹如何使用信號(hào)源進(jìn)行仿真,及模塊化儀器相關(guān)應(yīng)用。
使用信號(hào)源進(jìn)行仿真
在許多工程項(xiàng)目中,測(cè)試可能會(huì)因?yàn)槿鄙訇P(guān)鍵組件或進(jìn)行物理測(cè)試成本太高而被擱置,任意函數(shù)發(fā)生器(AWG)可用于創(chuàng)建幾乎任何波形并彌補(bǔ)這些缺失的組件。任意波形發(fā)生器是數(shù)字信號(hào)源,其工作方式與數(shù)字化儀非常相似。數(shù)字化儀對(duì)模擬波形進(jìn)行采樣、數(shù)字化,然后將其存儲(chǔ)在采集存儲(chǔ)器中,而AWG則在波形存儲(chǔ)器中存儲(chǔ)波形的數(shù)字描述,選定的波形樣本被發(fā)送到數(shù)模轉(zhuǎn)換器(DAC),然后通過(guò)適當(dāng)?shù)臑V波和信號(hào)調(diào)節(jié),以模擬波形的形式輸出。
對(duì)于仿真,如果您可以訪問(wèn)數(shù)字化儀獲取的缺失部分的響應(yīng)波形,或者可以通過(guò)分析方式創(chuàng)建該波形,那么也可以使用AWG作為替代品。如何使其能夠輸出一系列波形,每個(gè)波形代表被測(cè)系統(tǒng)的不同狀態(tài)?這一般是通過(guò)多個(gè)發(fā)電機(jī)和某種開(kāi)關(guān)來(lái)完成的,AWG是更加高效的一種方法。
德思特方案
AWG具有功能齊全的序列模式,例如TS-M4i.66xx-x8系列,能夠在波形之間實(shí)時(shí)切換,甚至無(wú)需重新加載不同波形的時(shí)間。AWG的波形存儲(chǔ)器是分段的,測(cè)試所需的每個(gè)波形都可以存儲(chǔ)在其自己的段中。AWG在計(jì)算機(jī)控制下根據(jù)存儲(chǔ)在單獨(dú)序列存儲(chǔ)器中的指令逐步處理波形,可以更新或更改序列存儲(chǔ)器的內(nèi)容,而不會(huì)影響輸出狀態(tài)。該序列模式操作允許基于測(cè)試結(jié)果自適應(yīng)地改變測(cè)試序列,此功能大大減少了測(cè)試時(shí)間并提高了測(cè)試的徹底性。

TS-M4i.66xx系列
例如,AWG可用于替代PSI5傳感器,產(chǎn)生一系列可編程輸出代碼。 PSI5使用曼徹斯特編碼。曼徹斯特碼總是在每個(gè)位周期的中間放置一個(gè)轉(zhuǎn)換。它也可能(取決于要傳輸?shù)男畔ⅲ┰谥芷陂_(kāi)始時(shí)有一個(gè)過(guò)渡,中間位轉(zhuǎn)換的方向指示數(shù)據(jù),周期邊界處的轉(zhuǎn)變不攜帶信息,它們的存在只是為了將信號(hào)置于正確的狀態(tài)以允許中間位轉(zhuǎn)換。有保證的轉(zhuǎn)換允許信號(hào)自計(jì)時(shí)。要生成PSI5數(shù)據(jù)包,需要三個(gè)波形段,如圖4所示。邏輯"1"(段1)由高到低的轉(zhuǎn)換表示。邏輯"0"(段0)由低到高的轉(zhuǎn)變表示。最后,基線電平(第2段)為 0 伏直流電平。
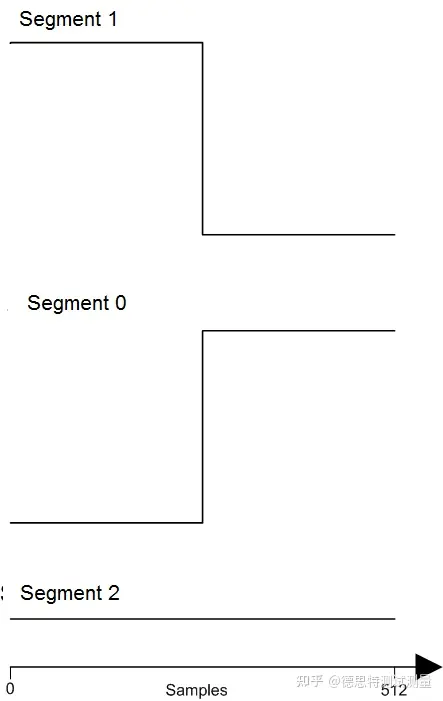
創(chuàng)建曼徹斯特編碼數(shù)據(jù)包需要三個(gè)波形段
通過(guò)使用這些組件定義三個(gè)波形段,可以合成數(shù)據(jù)模式的任何組合。這意味著通過(guò)重新排列這三個(gè)段的順序,可以更改數(shù)據(jù)包的內(nèi)容。下圖顯示了PSI5數(shù)據(jù)包的四個(gè)示例,每個(gè)數(shù)據(jù)包由三個(gè)段組成,但每個(gè)都有不同的數(shù)據(jù)內(nèi)容。
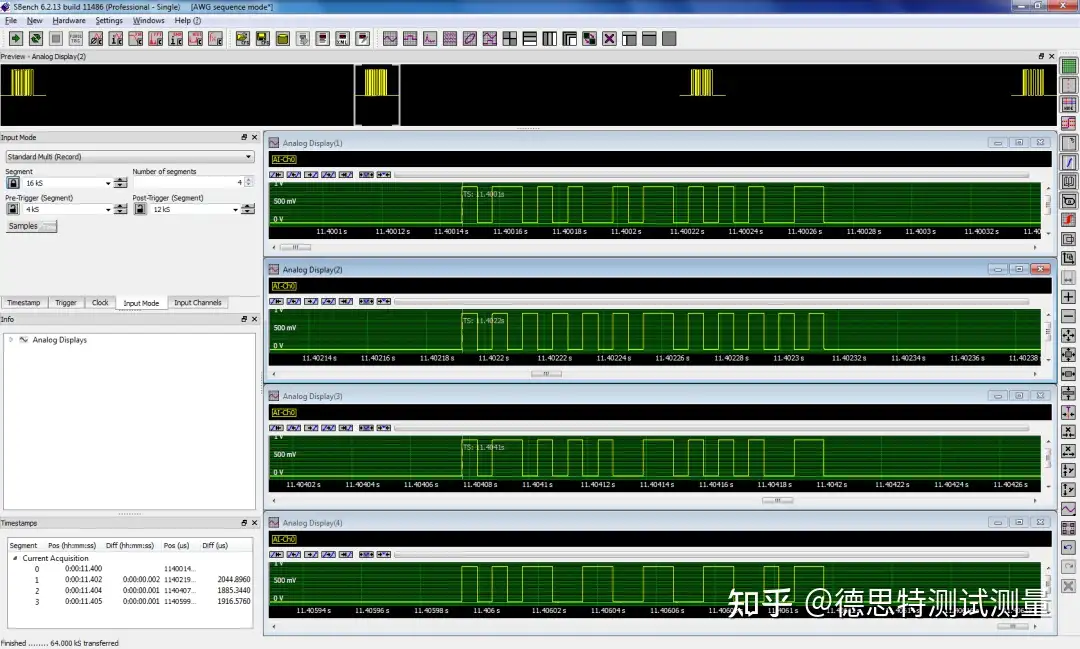
重新排序序列內(nèi)存內(nèi)容產(chǎn)生的四種不同的數(shù)據(jù)模式,這可以在AWG運(yùn)行時(shí)動(dòng)態(tài)完成
在此示例中,段的長(zhǎng)度設(shè)置為512個(gè)樣本,時(shí)鐘速率為50 MS/s,因此每個(gè)組件(TBIT)的持續(xù)時(shí)間將為10.24 μs。數(shù)據(jù)包被持續(xù)超過(guò)兩個(gè)位時(shí)鐘周期的基線信號(hào)分隔。AWG使用MATLAB腳本進(jìn)行控制,該腳本從三個(gè)段組裝了四種不同的數(shù)據(jù)模式,用于本次測(cè)試。數(shù)據(jù)包之間的切換無(wú)縫地進(jìn)行,沒(méi)有間斷。
電源排序
另一個(gè)值得關(guān)注的領(lǐng)域是加電或斷電時(shí)電源軌的正確排序。嵌入式計(jì)算系統(tǒng)通常需要多個(gè)電源電壓來(lái)為微處理器、存儲(chǔ)器和其他板載設(shè)備供電。大多數(shù)微控制器都有規(guī)定的電壓施加順序,以防止出現(xiàn)鎖定等問(wèn)題。電源管理IC(PMIC)或電源定序器執(zhí)行許多定序任務(wù),由于大多數(shù)處理器使用多個(gè)電壓,因此具有最多8個(gè)輸入的數(shù)字化儀是此類測(cè)量的理想儀器。此外,由于加電/斷電序列需要毫秒量級(jí),還需要大型采集存儲(chǔ)器。
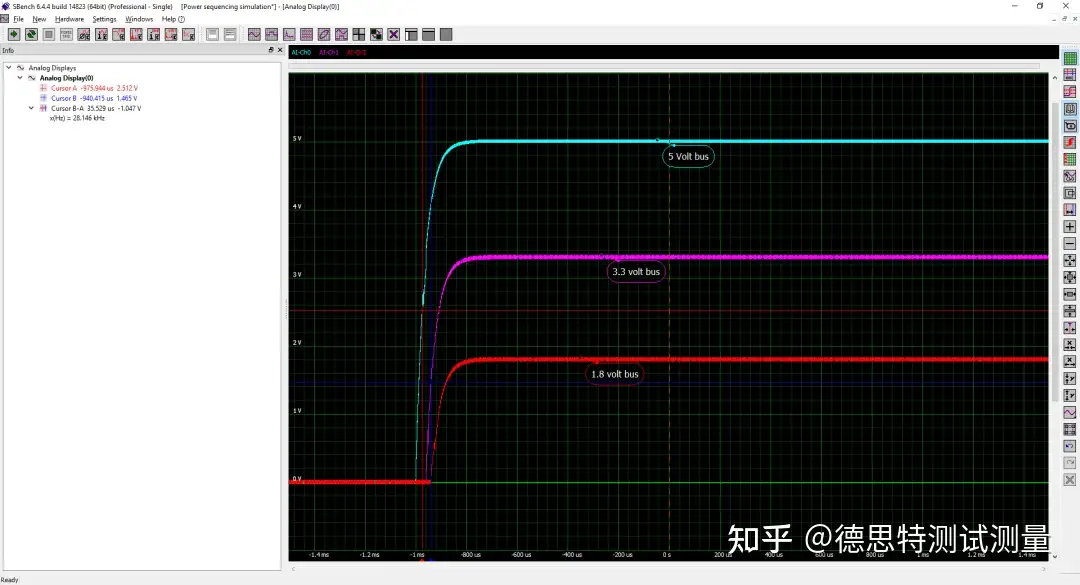
監(jiān)控 5、3.3 和1.8 V電源軌以確定正確的加電順序
上圖是電源序列測(cè)量的簡(jiǎn)單示例。監(jiān)控三個(gè)電源軌(5、3.3和1.8 伏)。預(yù)期電壓電平應(yīng)按所需順序單調(diào)上升。在此示例中,5伏電源先于其他電源打開(kāi),然后是3.3伏和1.8伏線路。
可以使用光標(biāo)測(cè)量時(shí)間延遲,如圖所示,其中5伏和3.3伏總線之間的時(shí)間延遲測(cè)量為35.5 μs。
這種類型的功率測(cè)量可以擴(kuò)展到測(cè)量紋波、調(diào)節(jié)和瞬態(tài)響應(yīng)。
機(jī)械測(cè)量
模塊化儀器還可以使用合適的傳感器進(jìn)行機(jī)械測(cè)量。下圖顯示了對(duì)風(fēng)扇執(zhí)行的一系列機(jī)械測(cè)量。
使用轉(zhuǎn)速計(jì)、加速度計(jì)和麥克風(fēng)測(cè)量風(fēng)扇的振動(dòng)和聲學(xué)特性。
此SBench 6屏幕圖像顯示最左側(cè)網(wǎng)格中的轉(zhuǎn)速計(jì)輸出。該波形由風(fēng)扇每轉(zhuǎn)一圈產(chǎn)生一個(gè)脈沖。通過(guò)測(cè)量該信號(hào)的頻率來(lái)讀取風(fēng)扇速度。圖左中心信息窗格中的頻率讀數(shù)顯示該頻率為27.8 Hz(每秒轉(zhuǎn)數(shù))。將此頻率讀數(shù)乘以60得出風(fēng)扇的轉(zhuǎn)速為1668轉(zhuǎn)/分鐘 (RPM)。顯示頻率最小值、最大值和偏差的統(tǒng)計(jì)讀數(shù)顯示在頻率讀數(shù)下方。
加速度計(jì)輸出出現(xiàn)在標(biāo)有“加速度計(jì)輸出”的上部中心網(wǎng)格中。已使用模擬通道設(shè)置設(shè)置自定義垂直刻度,以直接以g讀取。信號(hào)峰峰值和有效(rms)幅度的測(cè)量結(jié)果顯示在信息窗格中。信號(hào)的時(shí)域視圖有些難以解釋,因此計(jì)算該信號(hào)的快速傅里葉變換 (FFT)并顯示在右上角的顯示網(wǎng)格中。
FFT顯示構(gòu)成加速度信號(hào)的頻率分量。FFT的頻域或頻譜視圖提供了更容易的物理解釋,因?yàn)樗蛛x了各種頻率分量。最左邊的峰值出現(xiàn)在27.8 Hz處,即風(fēng)扇電機(jī)的旋轉(zhuǎn)頻率。其他光譜分量對(duì)應(yīng)于風(fēng)扇的物理屬性。
麥克風(fēng)輸出顯示在中心底部網(wǎng)格中,按比例讀取聲學(xué)聲壓。該數(shù)據(jù)也已重新調(diào)整,以便以壓力單位(即帕斯卡)讀取。信息窗格中的測(cè)量結(jié)果顯示該信號(hào)的峰峰值和有效幅度。與振動(dòng)信號(hào)的情況一樣,聲學(xué)的FFT提供了大量的物理洞察力。
總結(jié)
模塊化儀器非常適合車(chē)輛測(cè)試和測(cè)量應(yīng)用。它們提供大量分辨率為8至16位的通道。高達(dá)5 GS/s的數(shù)字化速率允許選擇與應(yīng)用相匹配的快速或慢速采樣。任意波形發(fā)生器支持模擬場(chǎng)景。即使缺少組件,它們也允許進(jìn)行測(cè)試。PCIe、PXI或LXI配置的選擇符合便攜式或?qū)嶒?yàn)室測(cè)試的需求。
-
CAN
+關(guān)注
關(guān)注
57文章
2884瀏覽量
466672 -
AWG
+關(guān)注
關(guān)注
1文章
64瀏覽量
17074 -
LIN
+關(guān)注
關(guān)注
4文章
223瀏覽量
40915 -
數(shù)字化儀
+關(guān)注
關(guān)注
0文章
152瀏覽量
18145
發(fā)布評(píng)論請(qǐng)先 登錄
裝備動(dòng)態(tài)數(shù)據(jù)自動(dòng)采集設(shè)備在RFID數(shù)字化車(chē)場(chǎng)中的深度應(yīng)用

如何設(shè)計(jì)一款高可靠性的汽車(chē)CAN總線(二)

L9663能直接轉(zhuǎn)成PSI5的接口接到ECU使用嗎?
虹科分享 PSI5通信信號(hào)分析與仿真,你需要哪些功能支持?

CAN總線的電路保護(hù)器件,通過(guò)二極管陣列的工作原理實(shí)現(xiàn)了對(duì)CAN總線的高效保護(hù)

CAN總線在工業(yè)自動(dòng)化中的作用

Spectrum高速數(shù)字化儀:從雷達(dá)脈沖測(cè)試到信號(hào)分析的廣泛應(yīng)用!

CAN總線與LIN總線的區(qū)別
CAN總線在工業(yè)自動(dòng)化中的應(yīng)用
高速數(shù)字化儀的技術(shù)原理和應(yīng)用場(chǎng)景
Lin總線的定義以及靜電保護(hù)方案

軍營(yíng)車(chē)輛管理:數(shù)字化的未來(lái)

基于CANoe在電控懸架系統(tǒng)中PSI5傳感器仿真及應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論