 機器人學專業學生利用 NVIDIA Jetson 開發出自主輪椅
機器人學專業學生利用 NVIDIA Jetson 開發出自主輪椅

通過使用邊緣 AI 技術,機器人開發者、卡倫亞理工學院本科生 Kabilan KB 致力于提升殘障人士出行質量。
有了人工智能的幫助,機器人、拖拉機及嬰兒推車(甚至是滑板運動場地),都在實現自主化發展。一位名叫 Kabilan KB 的開發者正在將自主導航功能應用于輪椅,幫助殘障人士收獲更高質量的出行體驗。
這位印度卡倫亞理工學院的本科生正在使用 NVIDIA Jetson 邊緣 AI 和機器人技術平臺推進他的自主輪椅項目。
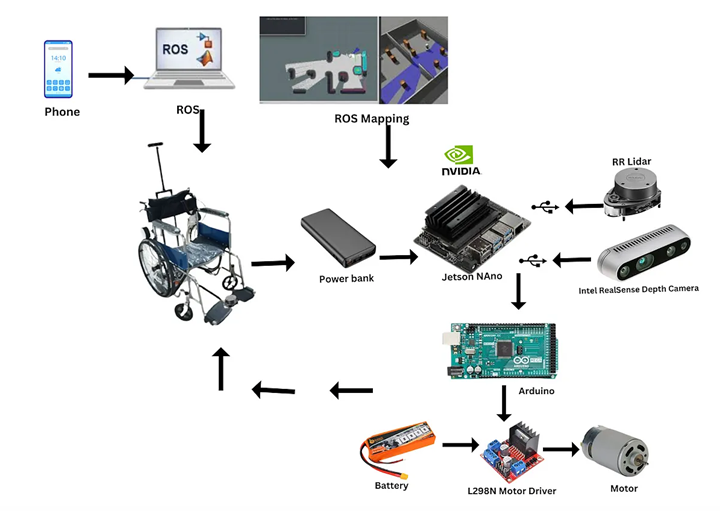
這款自主電動輪椅配備深度傳感器和激光雷達傳感器,并且與 USB 攝像頭進行了連接,其不僅能夠感知周圍環境,還可以規劃出一條通往用戶指定目的地的無障礙路徑。
KB 表示:“這款電動輪椅的使用者只需要提供他們要前往的地點,自主導航系統就會對這些位置進行編程,然后使用指定的數值表示系統規劃的路徑,比如‘1’鍵對應廚房,‘2’鍵對應臥室,使用者只要按下相應的按鍵,自動輪椅就會把他們帶到指定的地方。”
NVIDIA Jetson Nano 開發者套件可以實時處理來自攝像頭和傳感器的數據,然后使用基于深度學習的計算機視覺模型來識別環境中的障礙物。
 ?
?
?
?
?
?
?
?
?
?
這款開發者套件作為電動輪椅自主系統的“大腦”,可以生成周圍環境的 2D 地圖,以便規劃一條通往目的地的無碰撞路徑,同時也會向電動輪椅發送更新信號,以確保輪椅的行駛安全。
創客介紹
擁有機械工程背景的 KB 在最近幾年迷上了 AI 和機器人技術,于是他利用空閑時間在視頻網站上搜索相關課程視頻。
現在,他正在卡倫亞理工學院攻讀機器人與自動化專業學士學位,并立志有朝一日創辦一家機器人公司。
KB 自詡為自我教育的支持者,他已經獲得了 NVIDIA 深度學習培訓中心的多項認證,包括“在 Jetson Nano 上構建邊緣視頻 AI 應用”和“在 Omniverse 中使用擴展程序進行開發、自定義和發布”。
在掌握了機器人技術的基礎知識后,KB 開始在 NVIDIA Omniverse 中進行仿真實驗,這是一款基于 OpenUSD 框架的 3D 工具操作平臺。
他提到:“使用 Omniverse 進行仿真不需要斥巨資制作機器人原型模型,因為可以生成合成數據進行代替。這真是一款面向未來的軟件。”
靈感來源
KB 希望通過這個最新的 NVIDIA Jetson 項目創造出一種設備,去幫助他患有行動障礙的親戚,以及其他可能無法控制手動或電動輪椅的殘障人士。
KB 表示:“有時人們是負擔不起全電動輪椅的。在印度,只有一部分人才買得起這種輪椅,所以我決心使用市面上最基礎的電動輪椅,通過將其連接到 Jetson 進行自主運行。”
KB 的個人項目已經得到了波士頓兒童醫院與哈佛大學醫學院全球外科和社會變革項目(Program in Global Surgery and Social Change)的贊助。
KB 的 Jetson 項目
購買了基礎款的電動輪椅之后,KB 將輪椅的電機樞紐與 NVIDIA Jetson Nano、激光雷達和深度攝像頭進行了連接。
他使用 Jetson Nano 上的 YOLO 物體檢測功能以及 Robot Operating System(ROS,用于構建機器人應用的主流軟件),訓練自主輪椅的 AI 算法。
這些算法支持自主電動輪椅感知及繪制其所處的環境,并規劃出一條無碰撞的路徑。
“NVIDIA Jetson Nano 的實時處理速度可避免延遲或滯后,不影響用戶使用”,KB 提到,他從 6 月起就一直在開發該項目的原型。這位開發者在自己的博客上對這款自主輪椅的技術組件進行了詳細介紹,也在卡倫亞創新與設計工作室的視頻賬號上傳了演示視頻。
展望未來,KB 希望自己的項目可以進一步擴展,允許用戶使用與機器學習算法相連的腦電圖(EEG)中的大腦信號來控制輪椅。
KB 表示:“我想要創造出一種產品,能讓患有完全行動障礙的人士只需要想到要前往的目的地,就能控制輪椅順利抵達。”
了解更多關于 NVIDIA Jetson 平臺的信息:
https://www.nvidia.cn/autonomous-machines/embedded-systems/
GTC 2024 將于 2024 年 3 月 18 至 21 日在美國加州圣何塞會議中心舉行,線上大會也將同期開放。點擊“閱讀原文”或掃描下方海報二維碼,關注更多會議及活動信息。
原文標題:機器人學專業學生利用 NVIDIA Jetson 開發出自主輪椅
文章出處:【微信公眾號:NVIDIA英偉達】歡迎添加關注!文章轉載請注明出處。
-
英偉達
+關注
關注
22文章
3950瀏覽量
93724
原文標題:機器人學專業學生利用 NVIDIA Jetson 開發出自主輪椅
文章出處:【微信號:NVIDIA_China,微信公眾號:NVIDIA英偉達】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
NVIDIA Isaac Lab可用環境與強化學習腳本使用指南

通過NVIDIA Cosmos模型增強機器人學習

NVIDIA Isaac Sim和Isaac Lab現已推出早期開發者預覽版
NVIDIA Isaac Sim與NVIDIA Isaac Lab的更新
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
NVIDIA Isaac 是英偉達推出的綜合性機器人開發平臺
深度解讀英偉達Newton機器人平臺:技術革新與跨界生態構建
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+初品的體驗
使用NVIDIA Jetson打造機器人導盲犬
NVIDIA發布全新AI和仿真工具以及工作流
使用機器學習和NVIDIA Jetson邊緣AI和機器人平臺打造機器人導盲犬
NVIDIA與學術研究人員聯合開發手術機器人
NVIDIA 加速人形機器人發展






 工商網監
工商網監
評論