 Linux內核基礎:動態輸出使用
Linux內核基礎:動態輸出使用
動態輸出使用
打開svcsock.c文件中所有的動態輸出語句
# echo 'file svcsock.c +p' > /sys/kernel/debug/dynamic_debug/control
打開usbcore模塊中所有的動態輸出語句
# echo 'module usbcore +p' > /sys/kernel/debug/dynamic_debug/control
打開svc_process()函數中所有的動態輸出語句
# echo 'func svc_process() +p' > /sys/kernel/debug/dynamic_debug/control
打開文件路徑包含usb的文件里所有的動態輸出語句
# echo -n '*usb* +p' > /sys/kernel/debug/dynamic_debug/control
打開系統所有的動態輸出語句
# echo -n '+p' > /sys/kernel/debug/dynamic_debug/control
上面是打開動態輸出語句的例子,除了能輸出pr_debug()/dev_dbg()函數中定義的輸出信息外,還能輸出一些額外信息,如函數名、行號、模塊名字以及線程ID等
- p:打開動態輸出語句
- f:輸出函數名
- l:輸出行號
- m:輸出模塊名字
- t:輸出線程ID
另外,還可以在各個子系統的Makefile中添加ccflags來打開動態輸出語句
< ../Makefile >
ccflags-y += -DDEBUG
ccflags-y += -DVERBOSE_DEBUG
實際案例
例如在一個led驅動中的open()、write()等函數開頭添加一句pr_debug("%s entern",
**func **** ** );
#include < linux/module.h >
#include < linux/fs.h >
#include < linux/errno.h >
#include < linux/miscdevice.h >
#include < linux/kernel.h >
#include < linux/major.h >
#include < linux/mutex.h >
#include < linux/proc_fs.h >
#include < linux/seq_file.h >
#include < linux/stat.h >
#include < linux/init.h >
#include < linux/device.h >
#include < linux/tty.h >
#include < linux/kmod.h >
#include < linux/gfp.h >
static int major = 0;
static char kernel_buf[1024];
static struct class *hello_class;
#define MIN(a, b) (a < b ? a : b)
static ssize_t hello_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
int err;
pr_debug("%s entern", __func__);
err = copy_to_user(buf, kernel_buf, MIN(1024, size));
return MIN(1024, size);
}
static ssize_t hello_drv_write (struct file *file, const char __user *buf, size_t size, loff_t *offset)
{
int err;
pr_debug("%s entern", __func__);
err = copy_from_user(kernel_buf, buf, MIN(1024, size));
return MIN(1024, size);
}
static int hello_drv_open (struct inode *node, struct file *file)
{
pr_debug("%s entern", __func__);
return 0;
}
static int hello_drv_close (struct inode *node, struct file *file)
{
pr_debug("%s entern", __func__);
return 0;
}
/* 2. 定義自己的file_operations結構體 */
static struct file_operations hello_drv = {
.owner = THIS_MODULE,
.open = hello_drv_open,
.read = hello_drv_read,
.write = hello_drv_write,
.release = hello_drv_close,
};
static int __init hello_init(void)
{
int err;
pr_debug("%s entern", __func__);
major = register_chrdev(0, "hello", &hello_drv); /* /dev/hello */
hello_class = class_create(THIS_MODULE, "hello_class");
err = PTR_ERR(hello_class);
if (IS_ERR(hello_class)) {
unregister_chrdev(major, "hello");
return -1;
}
device_create(hello_class, NULL, MKDEV(major, 0), NULL, "hello"); /* /dev/hello */
return 0;
}
static void __exit hello_exit(void)
{
pr_debug("%s entern", __func__);
device_destroy(hello_class, MKDEV(major, 0));
class_destroy(hello_class);
unregister_chrdev(major, "hello");
}
module_init(hello_init);
module_exit(hello_exit);
MODULE_LICENSE("GPL");
為了方面查看,先清除內核輸出:
# dmesg -c
然后加載驅動,執行dmesg查看是否有打印:
# insmod hello_drv.ko
# dmesg
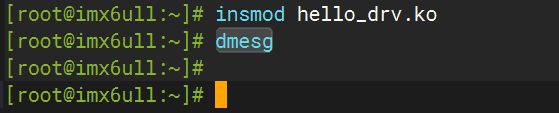
此時沒有pr_debug()的打印。這時再使用動態輸出打開hello_drv模塊的動態輸出:
# echo 'module hello_drv +p' > /sys/kernel/debug/dynamic_debug/control
然后執行該驅動的應用層程序,使其調用到驅動的open、write、close函數,從而執行pr_debug():
# ./hello_drv_test -w 10
再查看demsg內容:

可以看到,當打開了hello_drv模塊的動態輸出后,驅動中的pr_debug()語句就可以正常打印了。
再看看debugfs的control節點:
# cat /sys/kernel/debug/dynamic_debug/control

control節點記錄了剛剛執行pr_debug()時的文件名、所在行號、模塊名、函數名和輸出語句(p表示動態輸出的語句)。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
內核
+關注
關注
3文章
1408瀏覽量
41072 -
驅動
+關注
關注
12文章
1898瀏覽量
86501 -
Linux
+關注
關注
87文章
11456瀏覽量
212735 -
輸出
+關注
關注
0文章
96瀏覽量
22116
發布評論請先 登錄
相關推薦
熱點推薦
嵌入式Linux系統中內核抽象的動態擴展技術
擴展性的意義。然后,討論目前幾種主要的核心動態擴展技術,以及各種技術在嵌入式系統上的優缺點。最后,分析嵌入式Linux動態擴展性研究所面臨的挑戰和發展趨勢。 1、幾種主要的內核
發表于 10-26 09:22
嵌入式Linux系統中內核抽象的動態擴展技術
擴展性的意義。然后,討論目前幾種主要的核心動態擴展技術,以及各種技術在嵌入式系統上的優缺點。最后,分析嵌入式Linux動態擴展性研究所面臨的挑戰和發展趨勢。 1、幾種主要的內核
發表于 10-28 09:53
嵌入式Linux系統中內核抽象的動態擴展技術
嵌入式Linux系統中內核抽象的動態擴展技術隨著嵌入式技術的快速發展和嵌入式設備的普及,嵌入式應用發展的一個關鍵趨勢是從靜態的、固定的系統功能到動態的、可擴展的系統功能。首先,介紹嵌入
發表于 04-04 17:12
Linux嵌入式系統中內核技術的可動態拓展技術有哪些
值后要重新編譯內核,對普通用戶而言難以實現。通信的發展使得嵌入式操作系統的動態擴展成為可能,可以在遠程控制的基礎上增加嵌入式系統的靈活性,延長嵌入式系統的壽命;同時,由于嵌入式Linux的應用日益廣泛
發表于 08-06 06:39
Linux內核配置系統詳解
隨著 Linux 操作系統的廣泛應用,特別是 Linux 在嵌入式領域的發展,越來越多的人開始投身到 Linux 內核級的開發中。面對日益龐大的 L
發表于 11-01 15:45
?4次下載
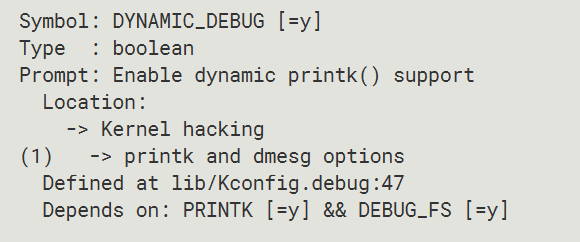
如何配置和使用Linux內核printk功能
了解如何配置和使用Linux內核printk功能,包括其動態調試功能。
這樣可以選擇性地打印調試消息,而無需重新編譯內核。
linux內核是什么_linux內核學習路線
Linux內核是一個操作系統(OS)內核,本質上定義為類Unix。它用于不同的操作系統,主要是以不同的Linux發行版的形式。Linux
發表于 09-16 15:49
?2784次閱讀
最硬核的Linux內核文章
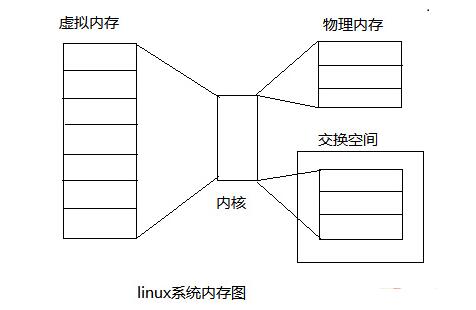
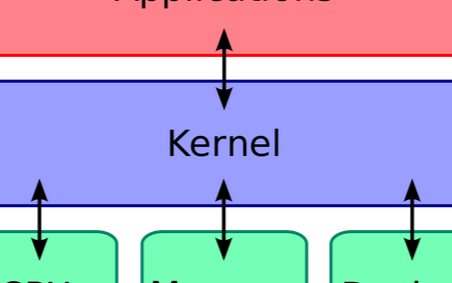
來源 :頭條號@Linux學習教程,冰凌塊兒 01 前言 本文主要講解什么是Linux內核,以及通過多張圖片展示Linux內核的作用與功能,
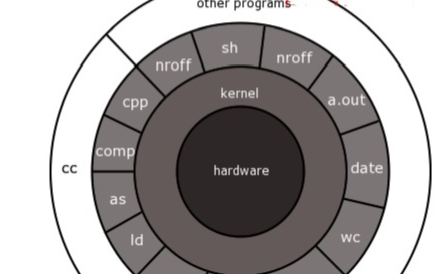
快速理解什么是Linux內核以及Linux內核的內容
01 前言 本文主要講解什么是Linux內核,以及通過多張圖片展示Linux內核的作用與功能,以便于讀者能快速理解什么是Linux
使用動態輸出打印內核的DEBUG信息
printk()是很多嵌入式開發者喜歡用的調試手段之一,但是,使用printk()每次都要重新編譯內核,很不方便。使用動態輸出在不需要重新編譯內核的情況下,方便的打印出





 工商網監
工商網監
評論