 GPS定位的基本原理
GPS定位的基本原理
淺析GPS定位基本原理
位置服務已經成為越來越熱的一門技術,也將成為以后所有移動設備(智能手機、掌上電腦等)的標配。而定位導航技術中,目前精度最高、應用最廣泛的,自然非GPS莫屬了。我們通常所說的GPS定位指的是衛星定位,但其實衛星定位是GNSS(Global Navigation Satellite System)定位,GPS定位只是GNSS定位的一種。網絡上介紹GPS原理的專業資料很多,而本文試圖從編程人員的角度出發,以一種程序員易于理解的方式來簡單介紹一下GPS定位的基本原理。當然,本文并沒有涉及具體的開發方面的技術。
一、GPS定位數學模型
之所以先介紹數學模型,是因為這個數學模型可能是程序員比較關心的問題。當然這個模型只是根據一些GPS資料而為程序員總結出來的一個簡化模型,細節方面可能并不符合實際,想了解具體細節請參考專業的GPS講解資料。
GPS定位,實際上就是通過四顆已知位置的衛星來確定GPS接收器的位置。
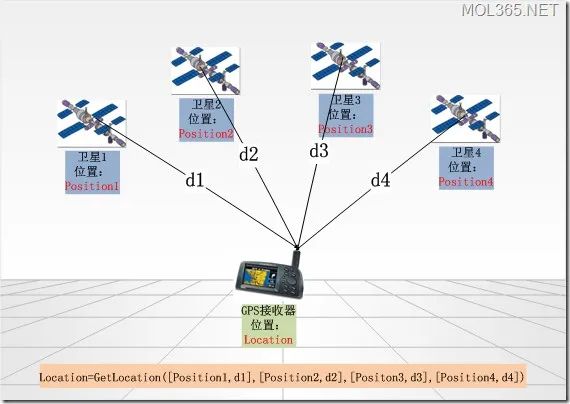
如上圖所示,圖中的GPS接收器為當前要確定位置的設備,衛星1、2、3、4為本次定位要用到的四顆衛星:
(1)Position1、Position2、Position3、Position4分別為四顆衛星的當前位置(空間坐標),已知;
(2)d1、d2、d3、d4分別為四顆衛星到要定位的GPS接收器的距離,已知;
(3)Location 為要定位的衛星接收器的位置,待求。
那么定位的過程,簡單來講就是通過一個函數GetLocation(),從已知的[Position1,d1]、[Position2,d2]、[Position3,d3]、[Position4,d4]四對數據中求出Location的值。
用程序員熟悉的函數調用來表示就是:Location=GetLocation([Position1,d1],[Position2,d2],[Position3,d3],[Position4,d4]);
二、逐層分析
一看到這個函數調用,程序員們就該來勁了:這些參數從哪里來?這個函數又是如何執行?由誰來執行的呢?立體幾何還沒有忘干凈的可能還要問:為什么必須要4對參數呢?那下面就來一起探究一下。
1.Position1、Position2、Position3、Position4這些位置信息從哪里來?
(1)實際上,運行于宇宙空間的GPS衛星,每一個都在時刻不停地通過衛星信號向全世界廣播自己的當前位置坐標信息。
(2)任何一個GPS接收器都可以通過天線很輕松地接收到這些信息,并且能夠讀懂這些信息(這其實也是每一個GPS芯片的核心功能之一)。
(3)這就是這些位置信息的來源。
2.d1、d2、d3、d4這些距離信息從哪里來?
(1)我們已經知道每一個GPS衛星都在不辭辛勞地廣播自己的位置,那么在發送位置信息的同時,也會附加上該數據包發出時的時間戳。
(2)GPS接收器收到數據包后,用當前時間(當前時間當然只能由GPS接收器自己來確定了)減去時間戳上的時間,就是數據包在空中傳輸所用的時間了。
(3)知道了數據包在空中的傳輸時間,那么乘上它的傳輸速度,就是數據包在空中傳輸的距離,也就是該衛星到GPS接收器的距離了。
(3)數據包是通過無線電波傳送的,那么理想速度就是光速c,把傳播時間記為Ti的話,用公式表示就是:di=c*Ti(i=1,2,3,4);這就是di(i=1,2,3,4)的來源了。
3.GetLocation()函數是如何執行的?
(1)這個函數是為了說明問題而虛構的,事實上未必存在,但是一定存在這樣類似的運算邏輯。
(2)這些運算邏輯可以由軟件來實現,但是事實上可能大都是由硬件芯片來完成的(這可能也是每一個GPS芯片的核心功能之一)。
4.為什么必須要四對參數?
(1)根據立體幾何知識,三維空間中,三對[Positioni,di]這樣的數據就可以確定一個點了(實際上可能是兩個,但我們可以通過邏輯判斷舍去一個),為什么這里需要四對呢?理想情況下,的確三對就夠了,也就是說理想情況下只需要三顆衛星就可以實現GPS定位。但是事實上,必須要四顆。
(2)因為根據上面的公式,di是通過c*Ti計算出來的,而c值是很大的(理想速度即光速),那么對于時間Ti而言,一個極小的誤差都會被放大很多倍從而導致整個結果無效。也就是說,在GPS定位中,對時間的精度要求是極高的。GPS衛星上是用銫原子鐘來計時的,但是我們不可能為每一個GPS接收器也配一個銫原子鐘,因為一個銫原子鐘的價格可能已經超過了這個GPS設備再加上使用GPS的這輛名貴汽車的價格。
(3)同時,由于速度c也會受到空中電離層的影響,因此也會有誤差;再者,GPS衛星廣播的自己的位置也可能會有誤差。其他等等一些因素也會影響數據的精確度。
(4)總之,數據是存在誤差的。這些誤差可能導致定位精確度降低,也可能直接導致定位無效。GetLocation(函數)中多用了一組數據,正是為了來校正誤差。至于具體的細節,我們就不用關心了,我們只要知道,多用一組數據,就可以通過一些巧妙的算法,消除或減小誤差,保證定位有效。這就是GetLocation()函數必須用四組數據的原因,也就是為什么必須有四顆衛星才能定位的原因。
總結下,GPS的誤差來自:
(1)電離層導致的誤差;
(2)接收設備導致的誤差;
(3)遮擋、多徑效應產生的誤差。遮擋是接收不到衛星信號。多徑效應是不但接收到了衛星直發的信號,還接收到了由高大建筑物反射而來的信號,這樣傳播時間就會出來錯誤,進而解算的位置也就會出錯。
5.GetLocation()函數返回的位置信息怎樣被GPS設備識別呢?
(1)前面說在進行位置計算時都是用的空間坐標形式表示,但是對GPS設備及應用程序而言,通常需要用的是一個[經度,緯度,高度]這樣的位置信息。
(2)那么我們可以想象,在GetLocation()函數返回位置結果前,可能會進行一個從空間坐標形式到經緯度形式的轉換
(3)我們不妨假設存在一個Convert(經緯度,空間坐標)這樣的函數來進行這個轉換。
6.GPS為什么啟動慢?
(1)需要時間搜星;
(2)接收到的GPS信號需要解調;
(3)衛星不斷發送周期為30s的電文,要對這30s的信息進行解析找到位置信息。
這就是所謂GPS在沒有任何知識的情況下啟動至少要持續30秒的原因。
7.單點定位與差分定位
(1)實際上上面所說的只是定位原理中的其中一種,稱為單點定位,或絕對定位:就是通過唯一的一個GPS接收器來確定位置
(2)目前定位精度最高的是差分定位,或稱相對定位:就是通過增加一個參考GPS接收器來提高定位精度
(3)上面我們已經圍繞一個虛擬的GetLocation()函數基本搞清楚了GPS定位的基本數學模型,對于編程而言,知道這些就足夠了(其實不知道也不影響編程)。如果好奇心還沒滿足的話,我們繼續了解一些GPS相關的背景知識。
三、GPS衛星是哪里來的?
GPS(Global Position System,全球定位系統),全稱為NAVSTAR GPS(NAVigation Satellite Timing And Ranging Global Position System,導航星測時與測距全球定位系統)。GPS是一個由美國國防部開發的空基全天侯導航系統,它用以滿足軍方在地面或近地空間內獲取在一個通用參照系中的位置、速度和時間信息的要求。
1.GPS發展歷程
1957年10月第一顆人造地球衛星SputnikⅠ發射成功,空基導航定位由此開始
1958年開始設計NNSS-TRANSIT,即子午衛星系統;
1964年該系統正式運行;
1967年該系統解密以供民用。
1973年,美國國防部批準研制GPS;
1991年海灣戰爭中,GPS首次大規模用于實戰;
1994年,GPS全部建成投入使用;
2000年,克林頓宣布,GPS取消實施SA(對民用GPS精度的一種人為限制策略)。
2.美國政府的的GPS策略
兩種GPS服務:
SPS--標準定位服務,民用,精度約為100M;
PPS--精密定位服務,軍用和得到特許的民間用戶使用,精度高達10M.
兩種限制民用定位精度的措施(保障國家利益不受侵害):
SA--選擇可用性,認為降低普通用戶的測量精度,限制水平定位精度100M,垂直157M(已于2005年5月1日取消);
AS--反電子欺騙。
3.其他衛星導航系統
GLONASS(全球軌道導航衛星系統),前蘇聯;
Galileo-ENSS(歐洲導航衛星系統,即伽利略計劃),歐盟;
北斗導航系統,中國。
四、GPS系統的構成
GPS系統=空間部分+控制部分+用戶部分。
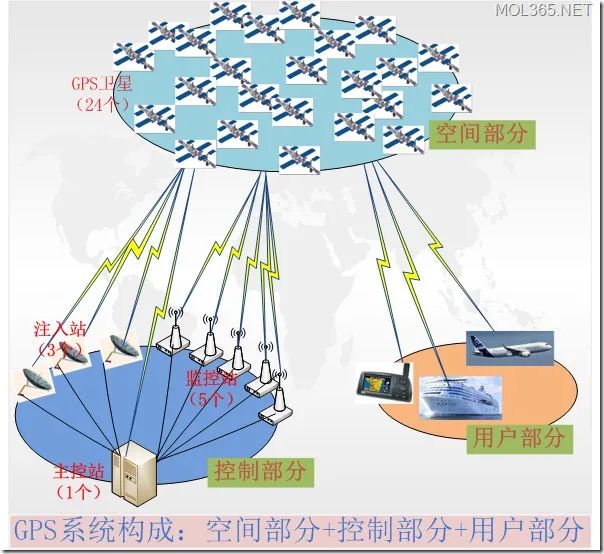
空間部分
GPS空間部分主要由24顆GPS衛星構成,其中21顆工作衛星,3顆備用衛星。
24顆衛星運行在6個軌道平面上,運行周期為12個小時。
保證在任一時刻、任一地點高度角15度以上都能夠觀測到4顆以上的衛星。
主要作用:發送用于導航定位的衛星信號。
構成:24顆衛星=21顆工作衛星+3顆備用衛星。
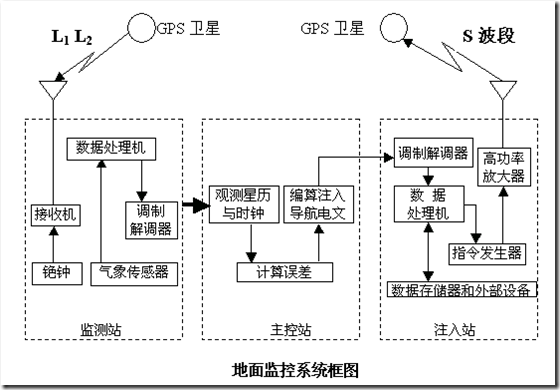
控制部分
GPS控制部分由1個主控站,5個檢測站和3個注入站組成。
組成:GPS控制部分=主控站(1個)+監測站(5個)+注入站(3個);
作用:監測和控制衛星運行,編算衛星星歷(導航電文),保持系統時間。
(1)主控站:從各個監控站收集衛星數據,計算出衛星的星歷和時鐘修正參數等,并通過注入站注入衛星;向衛星發布指令,控制衛星,當衛星出現故障時,調度備用衛星。
(2)監控站:接收衛星信號,檢測衛星運行狀態,收集天氣數據,并將這些信息傳送給主控站。
(3)注入站:將主控站計算的衛星星歷及時鐘修正參數等注入衛星。
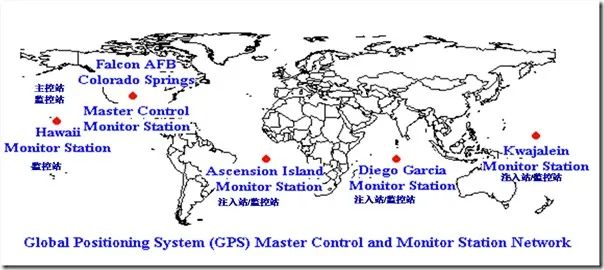
分布情況:
(1)主控站:位于美國科羅拉多州(Calorado)的法爾孔(Falcon)空軍基地。
(2)注入站:阿松森群島(Ascendion),大西洋;迭戈加西亞(Diego Garcia),印度洋;卡瓦加蘭(Kwajalein),東太平洋。
(3)監控站:1個與主控站在一起;3個與注入站在一起;另外一個在夏威夷(Hawaii),西太平洋。
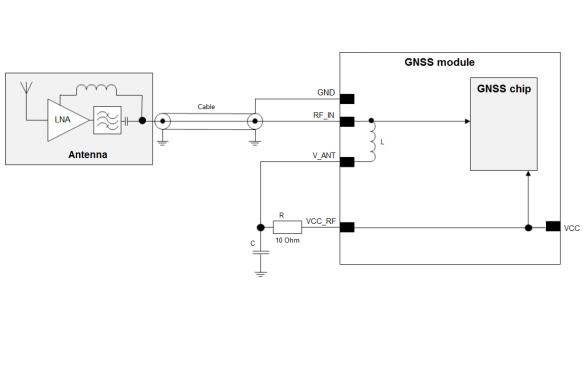
用戶部分
GPS用戶設備部分包含GPS接收器及相關設備。
GPS接收器主要由GPS芯片構成。如車載、船載GPS導航儀,內置GPS功能的移動設備,GPS測繪設備等都屬于GPS用戶設備。
組成:主要為GPS接收器
作用:接收、跟蹤、變換和測量GPS信號的設備,GPS系統的消費者。
來源:雨飛工作室
-
接收器
+關注
關注
15文章
2559瀏覽量
73357 -
定位
+關注
關注
5文章
1402瀏覽量
35815 -
數學模型
+關注
關注
0文章
83瀏覽量
12184
原文標題:淺析?GPS定位基本原理?
文章出處:【微信號:CloudBrain-TT,微信公眾號:云腦智庫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
數字壓力傳感器應用于GPS導航器
線性電源的基本原理是什么
GPS定位基本原理解析 精選資料推薦
無線充電的基本原理是什么
GPS基本原理及應用
GNSS定位的基本原理及應用的詳細資料說明
GPS定位誤差是怎么產生的
GPS定位基本原理與兩種測距計算方法資料下載






 工商網監
工商網監
評論