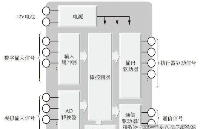
 汽車ECU的常規功能模塊
汽車ECU的常規功能模塊
- 常規功能模塊
① 電源:向ECU內的各模塊提供穩定的電壓(5V、3V等),且與發動機艙的12V電池連接;也可用于AD轉換器的標準電壓,可實現較高精度。
② 輸入緩沖器:將數字輸入信號轉換為可輸入至微控制器的信號級(信號電平)。
③ AD轉換器:將模擬輸入信號轉換為可輸入至微控制器的數字值。
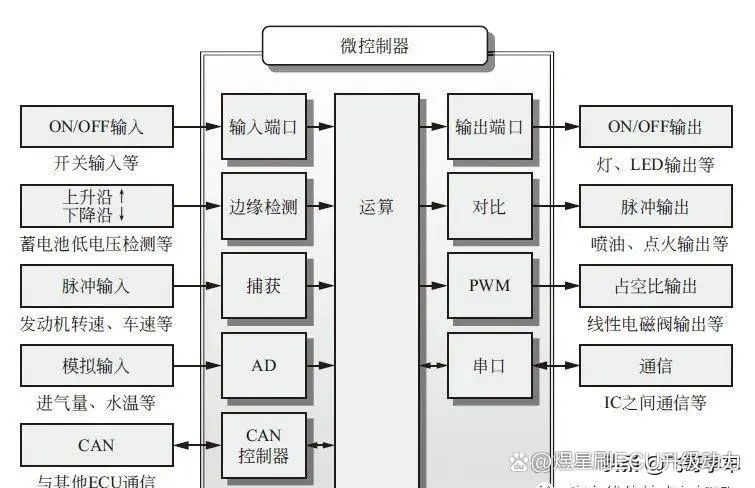
④ 微控制器:通過各種輸入信號算出控制量并輸出。
⑤ EEPROM:即帶電可擦可編程只讀存儲器(Electronically Erasableand Programmable Read Only
Memory),即使發動機停止后電源不再供電,也能存儲應記憶數據的存儲器。
⑥ 輸出驅動器:依據微控制器的輸出信號,轉換為執行器可驅動的信號形態,或者增幅電壓。
⑦
通信驅動器/接收器:通信驅動器是將微控制器的輸出數據轉換為滿足通信協議的通信信號;通信接收器是將其他ECU發送的信號轉換為可輸入至微控制器的信號級。
- 輸入/輸出ECU
作為與外部通信的接口,為了通過微控制器運算實現符合實際狀態的最佳控制,需要檢測外部狀態的輸入手段及實際控制驅動的輸出手段。
近年來為了滿足多種ECU之間密切協同控制,在ECU中還設置了通信手段。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
汽車電子
+關注
關注
3035文章
8243瀏覽量
169418 -
ecu
+關注
關注
14文章
914瀏覽量
55433 -
汽車
+關注
關注
14文章
3794瀏覽量
39205
發布評論請先 登錄
相關推薦
熱點推薦
汽車電子控制單元ECU的設計
語言Verilog HDL,給出了ECU 的體系結構以及各個功能模塊的具體設計和仿真結果。關鍵詞:汽車電子;電子控制單元;精簡指令集計算機;IP 核中圖分類號:TN492 文獻標識碼:AThe
發表于 10-06 15:13
汽車電子功能模塊保護中“拋負載”及保護選型有什么技巧
車輛的長期安全可靠性成為衡量汽車品質的一個重要指標。而保證汽車安全可靠,除了在汽車電子元器件的車規級的認證選型上需要關注之外,對于汽車電子功能模塊
發表于 03-06 07:25
SIMULINK功能模塊的處理
SIMULINK功能模塊的處理功能模塊的基本操作,包括模塊的移動、復制、刪除、轉向、改變大小、模塊命名、顏色設定、參數設定、屬性設定、模塊輸
發表于 06-19 12:50
?2688次閱讀
SIMULINK線的處理/SIMULINK自定義功能模塊
SIMULINK線的處理/SIMULINK自定義功能模塊 SIMULINK模型的構建是通過用線將各種功能模塊進行連接而構成的。用鼠標可以在功能模塊的輸入與輸出端
發表于 06-19 12:51
?5728次閱讀
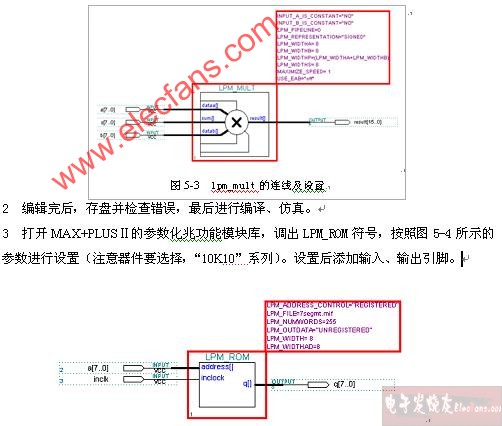
MAX+PLUSⅡ的參數化兆功能模塊庫的使用
實驗五、MAX+PLUSⅡ的參數化兆功能模塊庫的使用一 實驗目的1進一步掌握MAX+PLUSⅡ參數化兆功能模塊庫的使用。2了解參數化兆功能模塊庫LP
發表于 03-13 19:23
?1781次閱讀
PDA功能模塊的設計
PDA功能模塊的設計
Springboard擴展槽可集成在Visor與Visor Deluxe手持式電腦中,從一開始就為手持式電腦設計了真正的即插即用硬件擴展功能。由于獨特的
發表于 03-03 19:43
?1356次閱讀
QuartusⅡ中宏功能模塊的使用
QuartusⅡ軟件針對常用的功能,提供了參數化(Parameterized)的宏功能(megafunctions)模塊,通過調用宏功能模塊,可以減少工作量,加快設計的進程。 用戶可以
發表于 04-03 15:34
?12次下載
汽車電子控制單元ECU的IP核如何設計
本文給出了汽車電子控制單元 ECU 的 IP 核設計。該 IP 核基于 RISC 技術的單指令、單周期的體系結構,并采用了自頂向下(top-down)的設計方法和硬件描述語言 Verilog HDL,給出了 ECU 的體系結構以
發表于 10-31 08:00
?20次下載
汽車ECU是什么?ECU是如何工作的
如果把發動機比喻成汽車的“心臟”,那么汽車的“大腦”就應該是ECU了。何為ECU?ECU是如何工作的?本文詳細解析。
發表于 06-14 09:31
?1.2w次閱讀
AMT發動機V2 ECU的功能模塊
2005年1月的AMA規定要求,通過此軟件更新(V28),AMT還能夠使用鋰聚合物(LiPo)電池而不需要修改任何內容ECU的設置。鋰聚合物電池適用于AMT所有的發動機類型。 V2ECU功能模塊。 一或二通道操作。
發表于 12-11 09:14
?1186次閱讀
汽車ECU的內部構成與功能模塊
電源:向ECU內的各模塊提供穩定的電壓(5V、3V等),且與發動機艙的12V電池連接;也可用于AD轉換器的標準電壓,可實現較高精度。
汽車ECU的內部構成與功能模塊
貞光科技從車規微處理器MCU、功率器件、電源管理芯片、信號處理芯片、存儲芯片、二、三極管、光耦、晶振、阻容感等汽車電子元器件為客戶提供全產業鏈供應解決方案!常規功能模塊①電源:向ECU





 工商網監
工商網監
評論