") 基于STM32的SPI通信
基于STM32的SPI通信
引言
SPI是串行外設接口的縮寫,是一種高速的,全雙工,同步的通信總線。由于SPI高速和同步的特性,使其成為嵌入式系統(tǒng)和小型設備中使用最廣泛的幾種通信接口之一。本文將詳細講解一下SPI,并且最后基于STM32編寫一個例程。
介紹
SPI簡介
SPI(Serial Peripheral Interface)是一種串行外設接口,用于在微控制器(MCU)或數(shù)字信號處理器(DSP)等主設備與外部設備之間進行通信。SPI的設計旨在實現(xiàn)高速數(shù)據(jù)傳輸和簡單的硬件實現(xiàn)。
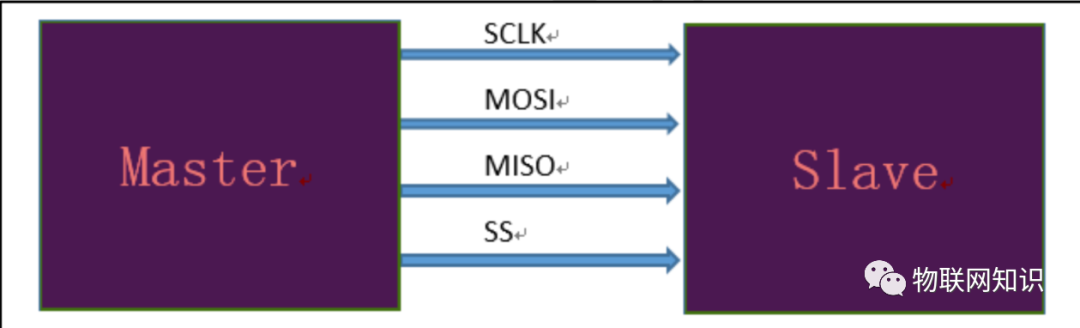
SPI接口通常由一個主設備(Master)和一個或多個從設備(Slave)組成。主設備控制通信的時序和數(shù)據(jù)傳輸,而從設備根據(jù)主設備的指令進行響應。SPI通信基于全雙工傳輸方式,主設備和從設備可以同時發(fā)送和接收數(shù)據(jù)。
物理層
SPI通信中的數(shù)據(jù)傳輸通過四根線實現(xiàn):
-
SCLK(Serial Clock):時鐘線,由主設備產(chǎn)生,并控制數(shù)據(jù)的傳輸速度。不同的設備支持的最
高時鐘頻率不同,兩個設備之間通訊時,通訊速率受限于低速設備。
-
MOSI(Master Output Slave Input):主設備輸出線,負責將數(shù)據(jù)從主設備發(fā)送到從設備。主機的數(shù)據(jù)從這條信號線輸出,從機由這條信號線讀入主機發(fā)送的數(shù)據(jù),即這條線上數(shù)據(jù)的方向為主機到從機。
-
MISO(Master Input Slave Output):主設備輸入線,負責將數(shù)據(jù)從從設備發(fā)送到主設備。
-
SS(Slave Select):從設備選擇線,用于選擇特定的從設備與主設備進行通信。當有多個從設備時,上面的三條線是共同使用的,而 NSS 則是用來區(qū)分多個不同的設備,當主機需要選擇某個從設備時,使用 NSS 信號線來尋址,把該從設備的 NSS 信號線設置為低電平,則該從設備被選擇,片選有效,然后主機與被選擇的從設備開始通訊。
-
SPI通信中的數(shù)據(jù)傳輸是基于幀(Frame)的概念,每個幀由一個傳輸字節(jié)(Byte)組成。主設備通過時鐘線控制數(shù)據(jù)傳輸?shù)臅r序,并通過主輸出線(MOSI)發(fā)送數(shù)據(jù),從設備則通過主輸入線(MISO)將數(shù)據(jù)發(fā)送回主設備。
協(xié)議層
通訊的起始和停止信號
當 NSS 信號線由高變低,是 SPI 通訊的起始信號。NSS 是每個從機各自獨占的信號線,當從機從自己的 NSS 線檢測到起始信號后,就知道自己被主機選中了 ,準備與主機通訊。NSS 由低變高,是 SPI 通訊的停止信號,表示本次通訊結束,從機的選中狀態(tài)被取消。
SPI 模式
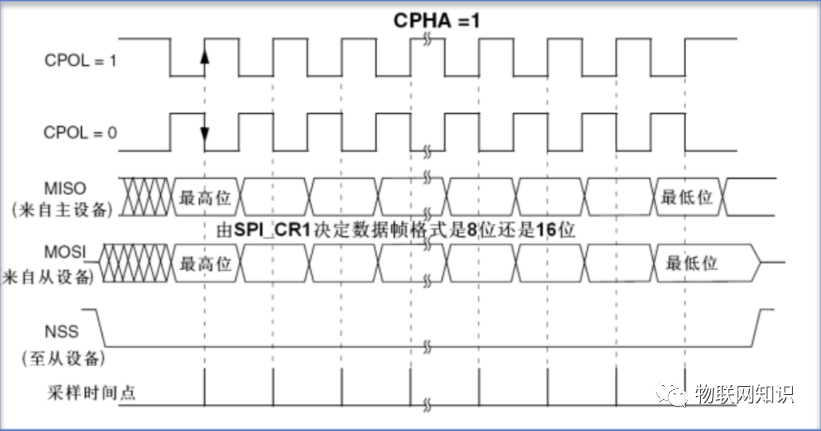
SPI通信中存在四種常見的模式,用于描述主設備和從設備之間數(shù)據(jù)傳輸?shù)臅r序和極性。他們的主要區(qū)別是總線空閑時 SCK 的時鐘狀態(tài)以及數(shù)據(jù)采樣時刻。這是通過 SPI_CR 寄存器的 CPOL 和 CPHA 位來控制。這些模式由兩個參數(shù)定義:時鐘極性(CPOL)和時鐘相位(CPHA)。
時鐘極性 CPOL 是指 SPI 通訊設備處于空閑狀態(tài)時,SCK 信號線的電平信號(即 SPI 通訊開始前、NSS 線為高電平時 SCK 的狀態(tài))。CPOL=0 時,SCK 在空閑狀態(tài)時為低電平,CPOL=1 時,則相反。
時鐘相位 CPHA 是指數(shù)據(jù)的采樣的時刻,當 CPHA=0 時,MOSI 或 MISO 數(shù)據(jù)線上的信號將會在 SCK 時鐘線的“奇數(shù)邊沿(串行同步時鐘的第一個跳變沿)”被采樣。當 CPHA=1 時,數(shù)據(jù)線在 SCK 的“偶數(shù)邊沿(串行時鐘的第二個跳變沿)”。

-
模式0(CPOL = 0,CPHA = 0):
時鐘極性(CPOL)為低電平。
時鐘相位(CPHA)為下降沿采樣。
數(shù)據(jù)在時鐘的下降沿進行采樣,數(shù)據(jù)的變化在時鐘的上升沿進行傳輸。
數(shù)據(jù)在時鐘的空閑狀態(tài)為低電平。
-
模式1(CPOL = 0,CPHA = 1):
時鐘極性(CPOL)為低電平。
時鐘相位(CPHA)為上升沿采樣。
數(shù)據(jù)在時鐘的上升沿進行采樣,數(shù)據(jù)的變化在時鐘的下降沿進行傳輸。
數(shù)據(jù)在時鐘的空閑狀態(tài)為低電平。
-
模式2(CPOL = 1,CPHA = 0):
時鐘極性(CPOL)為高電平。
時鐘相位(CPHA)為下降沿采樣。
數(shù)據(jù)在時鐘的下降沿進行采樣,數(shù)據(jù)的變化在時鐘的上升沿進行傳輸。
數(shù)據(jù)在時鐘的空閑狀態(tài)為高電平。
-
模式3(CPOL = 1,CPHA = 1):
時鐘極性(CPOL)為高電平。
時鐘相位(CPHA)為上升沿采樣。
數(shù)據(jù)在時鐘的上升沿進行采樣,數(shù)據(jù)的變化在時鐘的下降沿進行傳輸。
數(shù)據(jù)在時鐘的空閑狀態(tài)為高電平。
這四種模式的選擇取決于主設備和從設備之間的時鐘和數(shù)據(jù)采樣方式。具體選擇哪種模式取決于所使用的設備和應用的要求,以確保正確的數(shù)據(jù)傳輸和通信。
優(yōu)缺點
優(yōu)點
SPI接口具有以下幾個優(yōu)點:
- 高速數(shù)據(jù)傳輸:SPI接口通常能夠提供較高的數(shù)據(jù)傳輸速率,特別適用于對速度要求較高的應用。由于SPI使用全雙工通信方式,數(shù)據(jù)可以同時在主設備和從設備之間傳輸,實現(xiàn)更快的數(shù)據(jù)交換速度。
- 簡單硬件實現(xiàn):SPI接口的硬件實現(xiàn)相對簡單,通常只需要少量的引腳和簡單的電路即可。SPI接口沒有復雜的協(xié)議和通信控制器,因此在嵌入式系統(tǒng)和小型設備中使用SPI接口可以減少成本和復雜性。
- 靈活性:SPI接口支持點對點和多點通信。主設備可以連接多個從設備,每個從設備都有一個獨立的片選信號(Slave Select),可以根據(jù)需要選擇與主設備進行通信的從設備。這種靈活性使得SPI接口適用于連接多個外部設備或模塊的應用場景。
- 可靠性:SPI接口通常在短距離內進行通信,信號傳輸?shù)木嚯x相對較短,因此具有較低的傳輸誤差和干擾風險。此外,SPI接口通常使用全雙工通信,主設備和從設備可以同時發(fā)送和接收數(shù)據(jù),從而提高了通信的可靠性。
- 應用廣泛:SPI接口在各種領域都得到廣泛應用。它常用于連接各種外部設備,如傳感器、存儲器(如閃存和EEPROM)、顯示器、數(shù)字轉換器(ADC和DAC)等。由于其高速性和靈活性,SPI接口在通信和數(shù)據(jù)傳輸方面提供了一種有效的解決方案。
缺點
盡管SPI接口具有許多優(yōu)點,但也存在一些缺點需要考慮:
- 引腳占用:SPI通信通常需要使用多個引腳,包括時鐘線、數(shù)據(jù)輸入線、數(shù)據(jù)輸出線和片選信號線。這可能對系統(tǒng)設計帶來一定的復雜性,并且在引腳資源有限的情況下可能會造成問題。
- 距離限制:由于SPI通信通常是基于并行電平傳輸,其傳輸距離受到電信號衰減和干擾的限制。通信距離相對較短,一般在幾米以內。對于需要較長距離傳輸?shù)膽茫琒PI可能不是最佳選擇。
- 缺乏標準化:SPI接口本身沒有嚴格的標準化規(guī)范,導致不同設備和廠商可能會有不同的實現(xiàn)方式和特定的通信協(xié)議。這可能會導致兼容性問題,需要針對不同設備進行適配和定制。
- 無差錯校驗:SPI協(xié)議本身沒有提供內置的差錯檢測和校驗機制。這意味著在數(shù)據(jù)傳輸過程中,如果發(fā)生傳輸錯誤,接收方無法直接檢測到或糾正錯誤。對于對數(shù)據(jù)完整性要求較高的應用,需要額外的機制來確保數(shù)據(jù)的可靠性。
- 僅適用于點對點或簡單拓撲:SPI接口通常適用于點對點或簡單的拓撲結構,其中一個主設備控制一個或多個從設備。對于復雜的網(wǎng)絡結構或大規(guī)模系統(tǒng),SPI的連接和管理可能變得復雜,并且不容易擴展和維護。
使用例程
基于STM32的SPI通信
開發(fā)環(huán)境
安裝包在后臺回復對應名稱即可免費獲得
- STM32CubeMX
- Keil 5
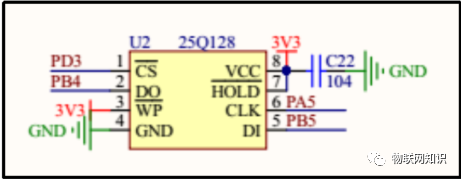
硬件連接
軟件實現(xiàn)
-
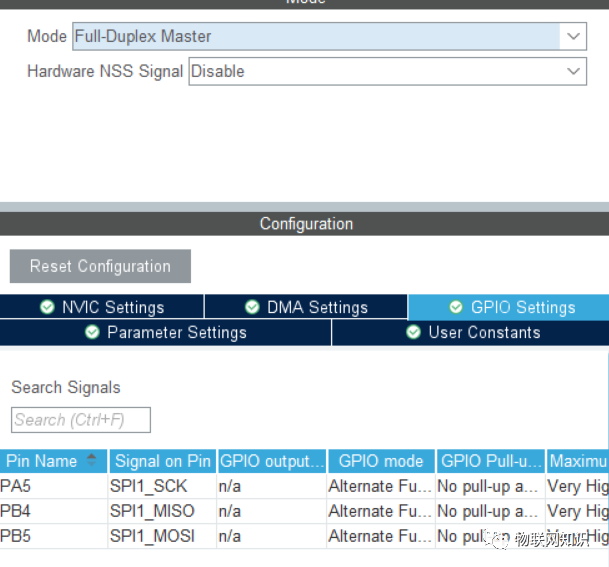
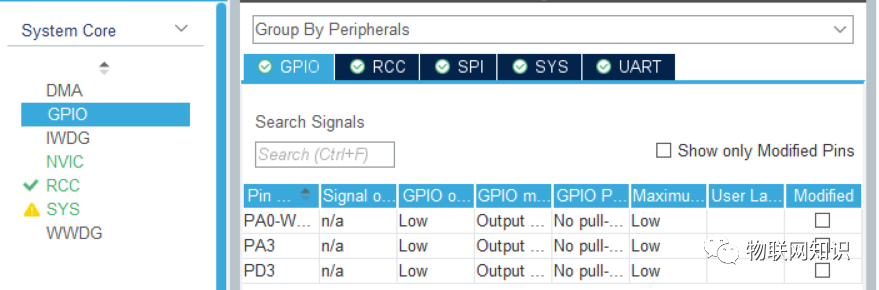
首先是使能引腳,選擇 SPI1 的雙全工模式。選擇 PD3 作為片選腳,也就是 NSS 信號線,產(chǎn)生起始和停止信號。
-
將 PD3 初始化為推挽輸出。可以看到 3 個 SPI 引腳都是使用 GPIO 的復用模式。
-
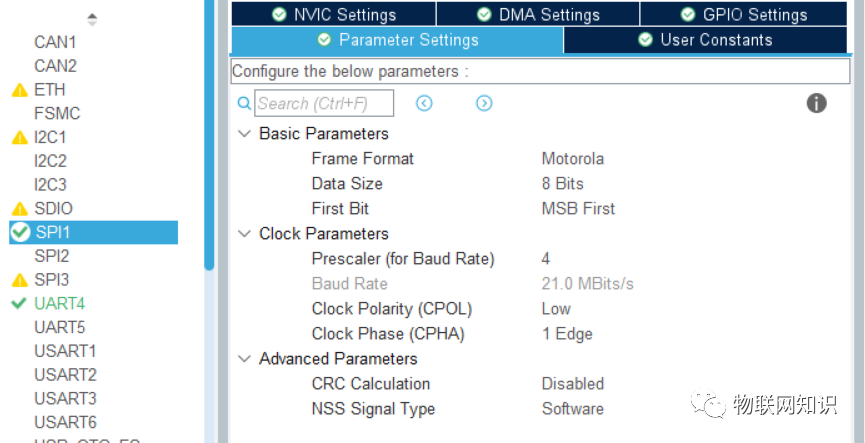
SPI參數(shù)配置
-
生成的程序里,主要的配置信息如下。
void MX_SPI1_Init(void)
{
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;//主機模式
hspi1.Init.Direction = SPI_DIRECTION_2LINES;//全雙工
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;//數(shù)據(jù)位為八位
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;//CPOL=0
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;//CPHA為數(shù)據(jù)線的奇變化沿
hspi1.Init.NSS = SPI_NSS_SOFT;//軟件控制NSS
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_4;//4分頻,84MHz/4=21MHz
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;//最高位先發(fā)送
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;//TIMODE模式關閉
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;//CRC關閉
hspi1.Init.CRCPolynomial = 10;//默認值,無效
if (HAL_SPI_Init(&hspi1) != HAL_OK)////初始化
{
Error_Handler();
}
}
總結
在現(xiàn)如今數(shù)據(jù)量劇增的時代,SPI這種通信速度快的通信接口以后一定會使用更加頻繁,所以還是要加以學習。
-
嵌入式系統(tǒng)
+關注
關注
41文章
3664瀏覽量
130816 -
接口
+關注
關注
33文章
8918瀏覽量
153134 -
通信
+關注
關注
18文章
6166瀏覽量
137318 -
STM32
+關注
關注
2288文章
10999瀏覽量
361991 -
SPI
+關注
關注
17文章
1767瀏覽量
94511
發(fā)布評論請先 登錄
STM32 SPI通信ST7789V顯示屏失真的原因?如何解決?
AD5270驅動,一半電阻輸出不變,驅動信號跟手冊描述一致,請問是什么問題?
STM32 SPI主模式配置好檢測不到時鐘信號
關于兩個STM32的SPI通信問題,真心希望得到大家?guī)椭。。?/a>
STM32 SPI通信高速全雙工的通信介紹
NodeMCU CH340與STM32的SPI通信不工作怎么解決?
求一個ADS1278與stm32的spi通信C語言例程
STM32 SPI通信常見問題分析資料下載

通俗理解STM32 SPI通信(主從雙機SPI通信)
STM32-SPI通信





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論