 愛普特32位MCU微控制器APT32F1023H8S6用于掃地機器人
愛普特32位MCU微控制器APT32F1023H8S6用于掃地機器人
掃地機器人的系統組成構架如下圖,它主要由數據采集單元、處理運算單元、執行單元和電源管理單元四部分組成。
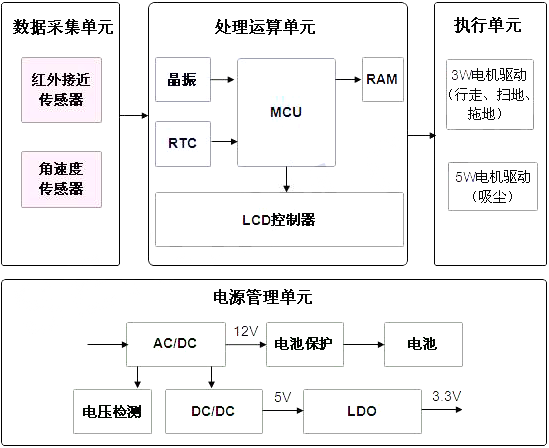
掃地機器人的系統組成構架
掃地機器人的四個組成部分中最主要的就是處理運算單元,這一單元主要完成傳感器檢測、路徑規劃、驅動控制和人機互動等主要工作,它是整個設備的核心部分,這一部分的性能好壞決定了掃地機器人的品質。
因此,按照以下這三個方面去選擇合適的微控制器很有必要:
1)用于掃地機器人的微控制器要實時的與數據采集單元、執行單元進行通訊,同時要快速的進行路徑規劃,所以要求微控制器具有高運行速度和數據處理能力。
2)用于掃地機器人的微控制器要有豐富的人機接口,便于人機互動。所以要求微控制器具豐富的GPIO及UART等外設。
3)掃地機器人工作時是使用電池供電的,所以微控制器要有低功耗的特點。
結合以上特點,本文推薦愛普特的C-Sky 32位CPU內核的APT32F1023系列MCU APT32F1023H8S6。
首先,APT32F1023H8S6微控制器的最高工作頻率可以達到48MHz,HWD硬件除法器進行快速的數據處理,可以滿足掃地機器人路線規劃算法處理,位置處理及執行控制等需求。
其次,APT32F1023H8S6在人機交互上具有更多的優勢,掃地機器人的人機交互主要由按鍵與顯示部分組成,APT32F1023H8S6有多達22個GPIO,芯片內支持17個掃描通道,可用于實現電容式觸摸按鍵,相較于傳統方案中的機械按鍵或薄膜按鍵來說,電容式觸摸按鍵更耐用,手感更好。另外,APT32F1023H8S6還集成多個UART、I2C、SPI等接口,可以方便實現其它的人機顯示接口。
APT32F1023H8S6采用的是低功耗工藝,芯片各功能模塊對低功耗做了極大優化,非常適合掃地機器人這種電池供電的設備使用。芯片內部集成有靈活的能耗管理系統,可控制芯片工作在活動、休眠、深度休眠、停機和關斷6種不同的功耗模式下。而且多數的外設模塊可以深度休眠甚至停機模式下工作,即可以降低系統的功耗又可以保證系統的正常工作。
在設計軟件時我們可以依據所使用的功能模塊的特點,讓CPU工作在不同的能耗模式下,實現應用實際電流的最優化。
概括來說,APT32F1023H8S6是一款低功耗、高集成密度的32位MCU,它非常適合掃地機器人這類電池供電、要求高速運算能力的應用。
APT32F1023H8S6其他特點:
?64KB Flash
?4KB RAM
?定時器
--2個16位定時器
--1個低功耗16位定時器
--1個32位超低功耗定時器
--1個32位的RTC
--1個16位脈沖計數器
--1個看門狗定時器
--16個32位通用寄存器
?12位1MSPS轉換速度的ADC
?工作電壓1.8V~5.5V
?工作溫度范圍40℃~85℃
?封裝:SSOP24SOP24SOP20QFN20
-
掃地機器人
+關注
關注
21文章
809瀏覽量
54346
發布評論請先 登錄
鈞敏科技AM2355驅動芯片在掃地機器人中的應用
再升級!愛普特微電子推出超高性價比全國產RISC核32位觸控MCU——APT32F104X

愛普特微電子推出國產RISC核32位觸控MCU—APT32F104X
再升級!愛普特微電子推出超高性價比全國產RISC核32位MCU——APT32F104X
恩智浦i.MX RT1052跨界MCU在掃地機器人中的應用

智能掃地機器人的工作原理和構成
霍爾元件在掃地機器人中的應用
掃地機器人應用解決方案
霍爾開關在掃地機器人中的應用
掃地機器人的核心技術突破
掃地機器人避障技術的發展史
供應 英集芯IP2348,適用于掃地機器人解決方案的鋰電池同步降壓充電芯片
掃地機器人高溫高濕試驗標準詳解及試驗方法

光耦知識分享‖探討光耦技術在掃地機器人的應用






 工商網監
工商網監
評論