 干貨 | 虹科KPA MoDK運行環境與搭建步驟(1)——運行環境簡介
干貨 | 虹科KPA MoDK運行環境與搭建步驟(1)——運行環境簡介
“虹科”工業自動化
本系列文章旨在幫助讀者對虹科KPA Automation體系進行一個簡要的理解,并且能使用MoDK進行快速的上手操作,包括:虹科KPA Automation、虹科KPA MoDK簡介,虹科KPA MoDK的運行環境搭建與例程測試。本文檔搭建的虹科KPA MoDK運行環境,是基于Win10,并且是以C/C++為開發語言進行的
01虹科KPA Automation運行體系
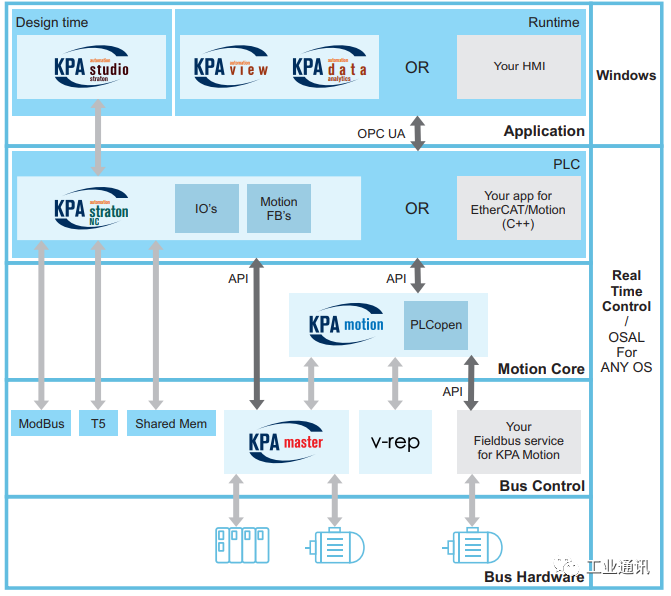
虹科KPA Automation是一套完整的控制體系,由幾個層級組成,自下而上分別是:設備層、總線層、控制層、應用層。每一層功能相對獨立,并提供層間交互的接口,高層的內容可以使用您自己的方法實現,如總線層使用KPA Master,控制層使用您自己的控制器。但是低層的內容不能被替換,如使用KPA motion而不使用KPA Master,這種方式不可行。
每一層的作用簡要如下:
設備層
實際的被控設備,由總線層進行數據收發。
總線層
接收來自控制層/設備層的數據,并轉發至設備層/控制層,目前支持的總線協議有:EtherCAT、ModBus、CAN、CANopen、PROFIBUS。具體支持的協議類型,還與控制層具體所選的控制器相關。MoDK也支持使用VREP機器人仿真平臺。
控制層
控制器所在的層級,可靈活選擇多種類型的控制器。可以選擇KPA Straton,結合MoDK/MDK時也可以選用C/C++應用程序。
應用層
主要用于數據的采集、監控和分析。
02虹科KPA MoDK簡介
虹科KPA MoDK在虹科KPA Automation控制體系中處于控制層一級,是控制系統中可選的一個模塊。結合虹科KPA Straton時,使用的是5種標準PLC語言開發,MoDK以功能塊的形式呈現;直接使用C/C++進行開發時,MoDK則以獨立的開發包/庫形式呈現。
MoDK的功能塊/函數接口完全符合PLCopen part1/part4標準,使用Straton進行開發時,只需按順序調用功能塊即可:初始化環境→初始化軸實例→運動控制;使用C/C++開發時的流程也類似,但是每一步的API調用則要遵循以下順序:功能塊變量聲明→功能塊實體創建→調用功能塊。具體的流程將在后續更新中詳細闡述。
虹科KPA MoDK目前支持的PLCopen運動控制函數如下:
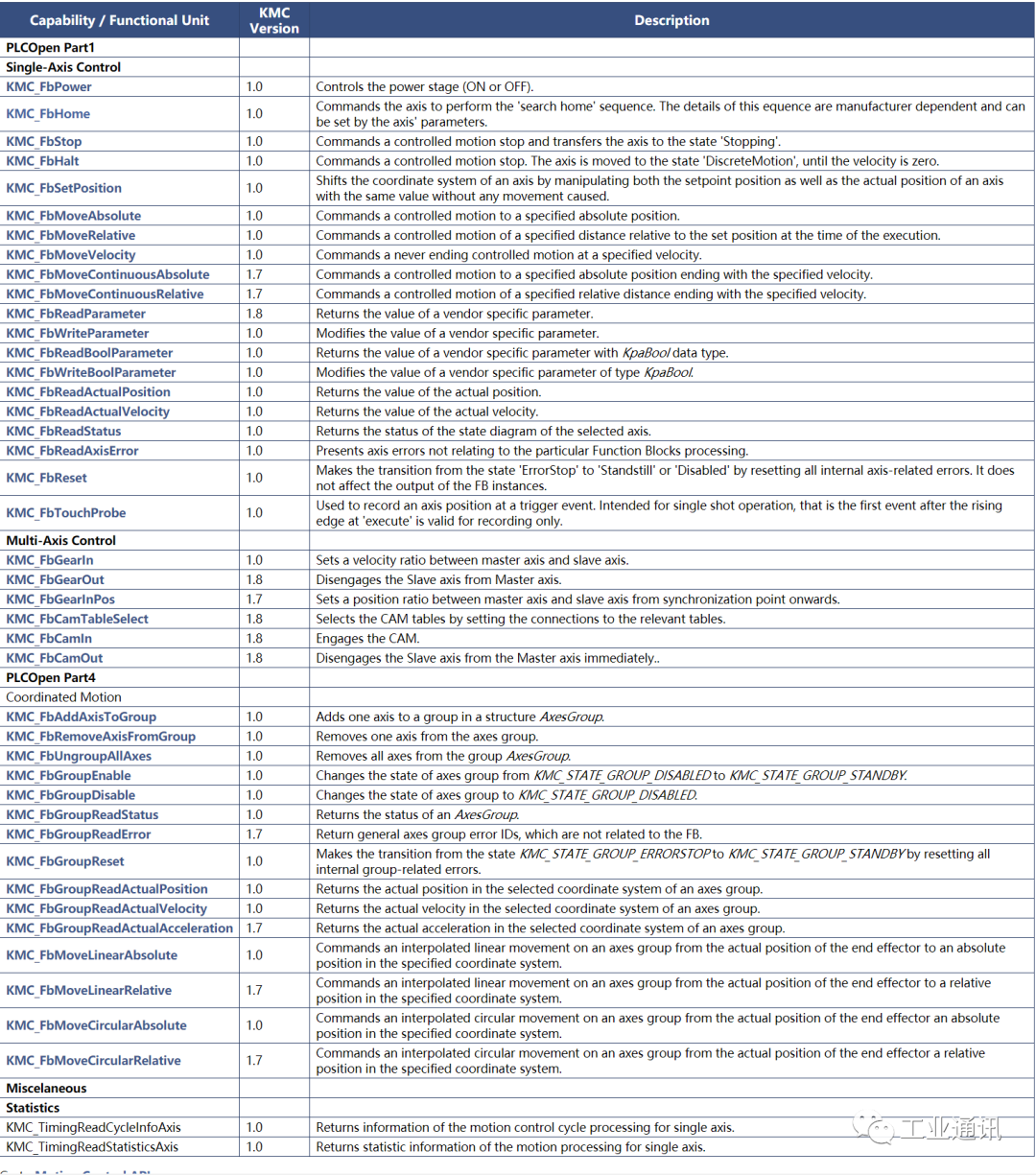 可以看到MoDK涵蓋了PLCopen part1/part4中的絕大多數功能塊,并有性能優異的路徑生成器,使得控制循環能低于1ms,能滿足絕大多數的應用需求。
可以看到MoDK涵蓋了PLCopen part1/part4中的絕大多數功能塊,并有性能優異的路徑生成器,使得控制循環能低于1ms,能滿足絕大多數的應用需求。虹科KPA MoDK的特性
1
虹科MoDK立足于虹科KPA自研的可擴展OSAL(操作系統抽象層),只要使用不同的OSAL庫文件進行編譯,即可運行于多種操作系統下。
2
最多支持三軸聯動,點對點的軸控制理論上不限制軸數,僅取決于運行平臺的性能。
3
控制循環低于1ms,同時擁有優秀的路徑生成器。
4
Motion函數遵循PLCopen part1/part4標準編寫,可集成于虹科KPA Straton環境中,使用PLC語言編程,更加容易上手使用;也可以跳脫出Straton環境,以C/C++庫形式提供開發包,使用計算機語言開發。
5
支持虹科KPA matser 1.x/暫不支持2.x版本。
6
支持控制3種對象:Simulation 虹科KPA 運行環境內部仿真(純文字參數仿真)/Vrep機器人仿真平臺/ECAT & CiA402設備。
7
初始化參數可以在Studio中的Motion Configuration Utility進行配置,減少初始化過程中的代碼量,并可以在運行過程中動態調整運動參數的最大值(如速度、加速度、加加速度)。
8
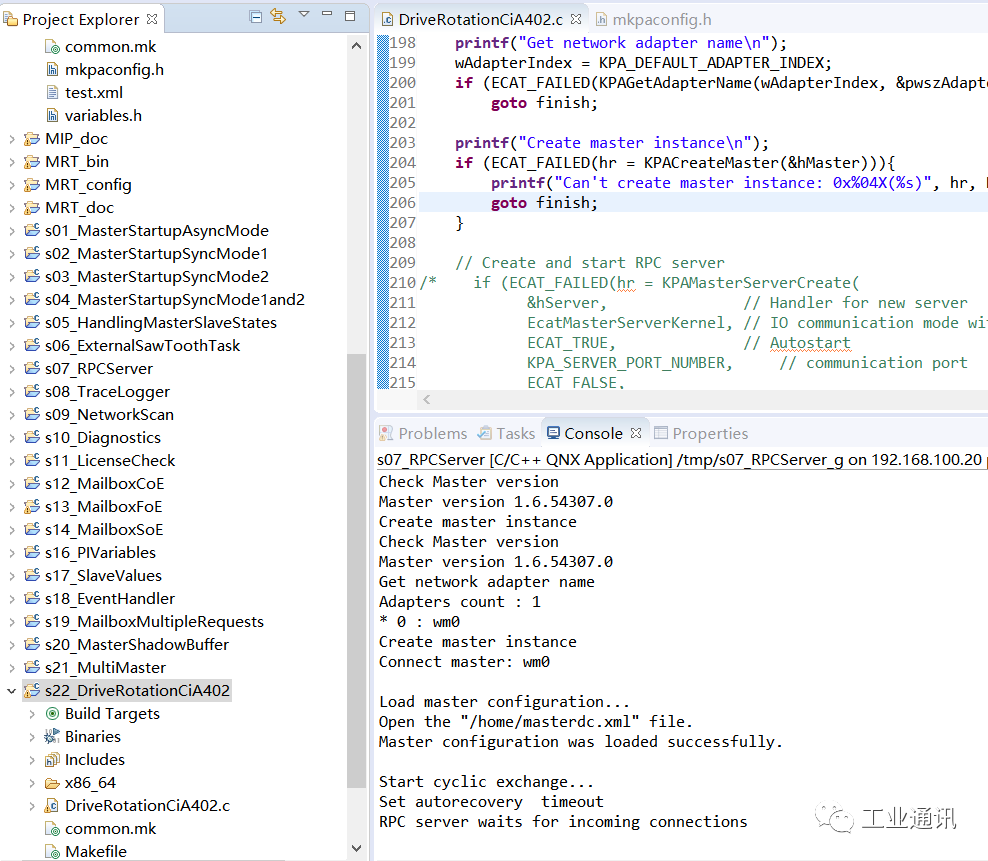
C/C++開發提供22個演示例程,涵蓋了motion的絕大多數功能,使用CMAKE設置參數進行編譯,可以得到不同平臺、不同操作系統下的工程文件,可直接進行演示。
-
自動化
+關注
關注
29文章
5738瀏覽量
81600
發布評論請先 登錄
10kV站所柜內運行狀態及環境指標監測管理平臺分析
KaihongOS操作系統:開發環境搭建

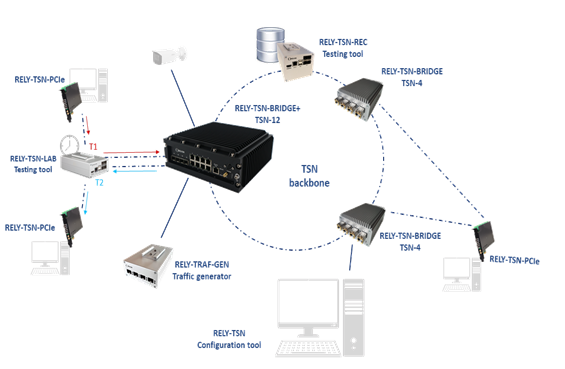
虹科方案 僅需4個步驟!輕松高效搭建虹科TSN測試網絡
如何搭建企業AI開發環境
SSM開發環境的搭建教程 SSM與Spring Boot的區別
干貨!基于RK3568的 AI 人工智能環境搭建步驟
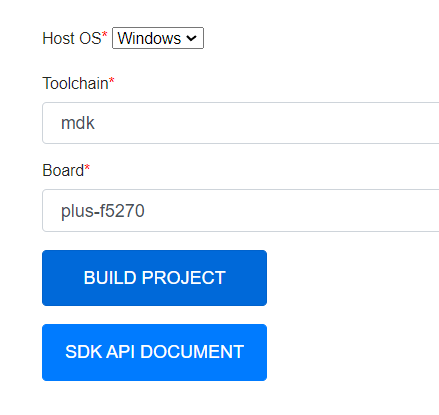
【MM32F5270】Keil開發環境搭建
Docker運行環境安裝
pycharm配置pytorch運行環境
pytorch環境搭建詳細步驟
PyTorch深度學習開發環境搭建指南
請問Eclipse環境如何搭建IoT Solution?
在美國VPS上設置開發和測試環境的基本步驟和技巧

虹科干貨 |?多設備協同無憂:Linux環境下PCAN固定設備ID/通道分配指南






 工商網監
工商網監
評論