 步進驅動方案-TMC5160和TMC2160的使用?
步進驅動方案-TMC5160和TMC2160的使用?
一、TMC5160和TMC2160可以PIN對PIN替換,TMC5160自己帶有梯形曲線加速功能,這是它與TMC2160唯一的區別。因此下面都以TMC5160來做介紹。


二、TMC5160的3種工作模式
TMC5160通過兩個引腳來控制它的工作模式:SD_MODE和SPI_MODE。
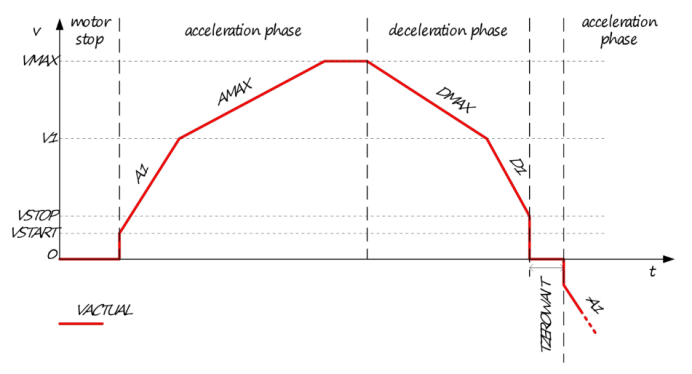
1、當SD_MODE接地,SPI_MODE拉高,TMC5160即工作在模式1。在該模式下,用戶通過SPI接口來設置TMC5160的寄存器。TMC5160使用自己的梯形曲線發生器來控制步進電機轉動,用戶需要設置:開始運動速度VSTART、第一段折線末速度V1、最大速度VMAX、停止速度VSTOP、第一段折線的加速度A1、第二段折線加速度AMAX、第四段折線的減速度DMAX、第五段折線的減速度D1。把上面的參數設置好,再設置工作模式:速度模式和位置模式。最后再設置目標位置。
如果是速度模式運行,不需要設置目標位置,電機就會開始轉動。如果是位置模式,則需要設置目標位置,且目標位置與電機當前位置值不同電機才會轉動。下圖中的紅線是電機的實際速度,不管是速度模式還是位置模式,電機的運行過程會按照下圖來進行。
2、當SD_MODE接高電平,SPI_MODE拉高,TMC5160工作在模式2。在該模式下,用戶通過SPI接口來設置TMC5160的寄存器。TMC5160的功能和DRV8825類似,外界通過脈沖和方向引腳來控制步進電機運動。
3、當SD_MODE接高電平,SPI_MODE接地,TMC5160工作在模式3。在該模式下,SPI接口失能,TMC5160的工作狀態由CFG引腳配置,外界通過脈沖和方向引腳來控制步進電機運動。TMC5160可以完全獨立工作,不需要接CPU。
三、TMC5160的功能模塊
TMC把自己的功能分為下面幾個獨立的功能模塊:
1、stealthChop2:使用電壓PWM斬波,電機絕對無噪聲,但只能用于電機低速狀態。
2、spreadCycle:使用傳統的恒流斬波,斬波周期中的MOS管打開時間、快衰減時間、滿衰減時間都可以控制。
3、stallGuard2:通過測量電機的反電動勢來測量電機的負載。測量到了負載,就可以根據負載自適應調節電流,檢測堵轉等。當電機轉速太低(比如1秒1圈),反電動勢太小,或者電機轉速太高,反電動勢達到電源電壓導致線圈無法輸出正弦電流,都會導致stallGuard2不能正常測量。
4、coolStep:根據stallGuard2測量的負載值,自動調節驅動電流,使之最小。
5、dcStep:根據驅動電流和負載,自動調節電機速度,使之最大而不失步。當負載增加,速度會自動降低。
6、microPlyer:細分內插器。當工作于模式2和3,外部輸入STEP信號控制電機轉動,microPlyer可以自動在兩個STEP脈沖之間插入2到256個微步,來使電機轉動更加平滑。microPlyer會測量兩個STEP脈沖之間的間隔,來把他們等分為2到256份,TMC5160就自動以2到256細分來驅動電機,當輸入一個脈沖,對于TMC5160來說就已經輸入了2到256個脈沖,再對應相同的細分數,這樣就完成了細分內插。局限在于,STEP信號必須比較穩定,否則會影響microPlyer對于脈沖間隔時間的測量。
7、ABN編碼器接口:TMC5160可以外接增量式編碼器,編碼器不僅用于失步的判斷,還可實現運動控制器的歸零功能(替代參考開關)。可編程預分頻器設置編碼器分辨率以適應電機分辨率。TMC5160內部包含一個32位編碼器計數器。
四、TMC5160的SPI接口
TMC5160的數據幀為固定的40位,在整個數據幀期間,SPI的片選都要保持有效(低電平)。數據幀由一個字節的地址和4個字節的數據組成。讀操作,地址字節的最高位是0。寫操作,地址字節的最高位是1。
不管是讀操作還是寫操作,在向TMC5160傳輸數據的同時,TMC5160會通過MISO傳輸狀態寄存器SPI_STATUS的值+上次操作的數據。比如,向CHOPCONF寄存器(地址0x6C)寫入0x000100C3數據,再向IHOLD_IRUN寄存器(地址0x10)寫入0x00061F02數據,再向TPOWER_DOWN寄存器(地址0x11)寫入0x0000000A數據,SPI的MOSI和MISO上的數據如下圖:
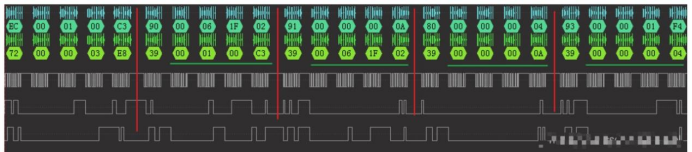
可以看到在向0x6C寫入0x000100C3數據的同時,MISO上會收到0x72和0x000003E8,這個0x72就是傳輸狀態寄存器SPI_STATUS的值,0x000003E8則是上次操作的數據內容。接下來向0x10寫入0x00061F02數據,同時接收到0x39和0x0x000003E8,0x39是傳輸狀態寄存器SPI_STATUS的值,0x000100C3則是上次操作的數據內容。上次操作是往0x6C寫入0x000100C3數據,所以此時返回的數據就是0x000100C3。
傳輸狀態寄存器SPI_STATUS的內容為:
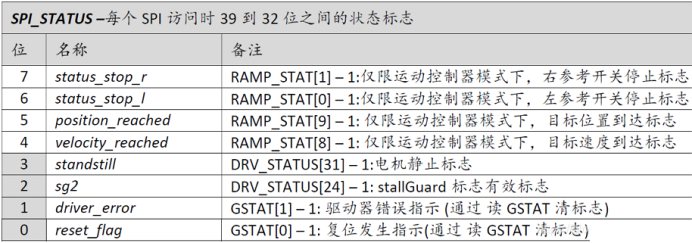
所以,利用TMC5160的通信特性。可以實時得到SPI_STATUS的值,從而得知TMC5160的狀態。也可以利用其返回機制,判斷SPI傳輸是否被干擾,數據是否有錯。
同樣的讀操作過程也是如此,需要發送兩個40位的數據幀才能讀到寄存器的值。比如讀XACTUAL寄存器(地址0x21),發送0x21+0x00000000的同時會收到SPI_STATUS+32位前次操作值,再次發送0x21+0x00000000,此時才會收到SPI_STATUS+XACTUAL寄存器的值。過程如下:

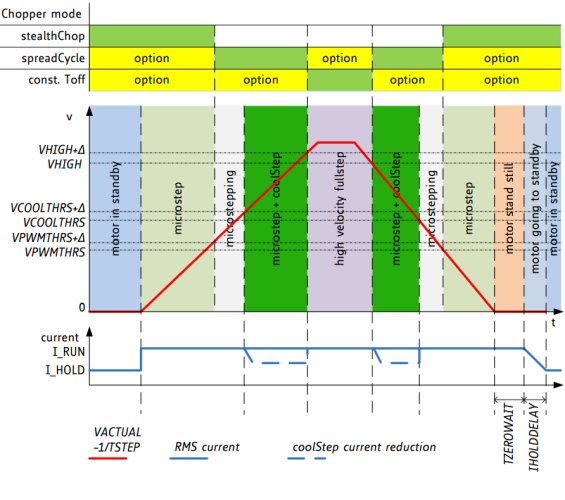
1、上圖顯示了TMC5160中4個電流參數的關系:I_RUN、I_HOLD、TPOWERDOWN(上圖中的TZEROWAIT)、IHOLDDELAY。I_RUN是電機運行電流,I_HOLD是靜止電流,TPOWERDOWN是電機停止到電流開始降低的延遲時間,IHOLDDELAY是電流從I_RUN降到I_HOLD的時間。
2、顯示了3個速度閾值與其對應的斬波模式。
當速度低于VPWMTHRS,使用stealthChop進行電壓PWM控制。
當速度處于VPWMTHRS和VHIGH之間,使用spreadCycle進行恒流斬波控制。
當速度大于VHIGH,使用恒定關斷時間的斬波模式。
只有當速度處于VCOOLTHRS和VHIGH之間,stallGuard2和coolStep才能使用。
六、stealthChop介紹
1、參數自整定
stealthChop不需要更多的配置,其參數可以自整定。用戶可以配置參數自整定的相關設置,或將存儲的參數作為參數自整定階段的初始值。自整定分為兩個步驟:
步驟1:自整定PWM_OFS參數。讓電機以運行電流值大小靜止一段時間。(一定要保證電機電流等于運行電流值,因此如果使能了電機靜止時候電流降低功能,需要先給步進脈沖將驅動器切換回運行電流,或者將IHOLD 設置成IRUN 。)
步驟2:自整定PWM_GRAD參數。讓電機以一定的速度運行電機,讓電機電流可以達到設定的運行電流。(典型速度范圍為60-300 轉/分)
參數是否自整定成功的依據是:在步驟2中讀PWM_SCALE_AUTO值,看其是否下降到接近0,如果下降到接近0,表示成功。
步驟1是否完成是判斷不了的,但是如果步驟1尚未完成就進行步驟2是不行的。
自整定的參數有兩個:PWM_OFS 和PWM_GRAD,當電機類型改變,參數需要重新整定。修改GLOBALSCALER或VS電壓會使參數自調整過程的結果無效。參數自整定好后可以從寄存器PWM_OFS_AUTO 和PWM_GRAD_AUTO中讀出來保存到程序中,以后直接賦值給TMC5160即可,不需要再次整定了。
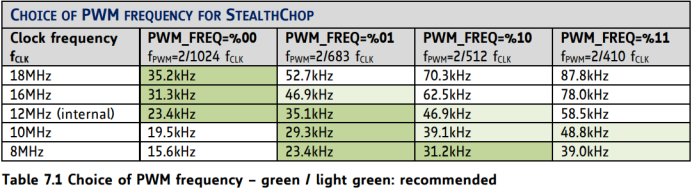
2、PWM斬波頻率
通過下表配置,如果使用TMC5160內部時鐘,則頻率為12MHz。下表中綠色越深,代表越推薦。
七、spreadCycle
相對于stealthChop 的電壓PWM 斬波控制,spreadCycle 是周期電流控制模式(類似于DRV8711)。因此,可以對電機速度或電機負載的變化作出極快的反應。有兩種周期斬波模式可用: 一種稱為spreadCycle的斬波算法和一種恒定關斷時間斬波模式。恒定關斷時間模式循環有三個階段:導通、快衰減和慢衰減。spreadCycle 模式循環有四個階段:導通、慢衰減、快衰減和第二慢衰減。
1、spreadCycle的周期和參數計算
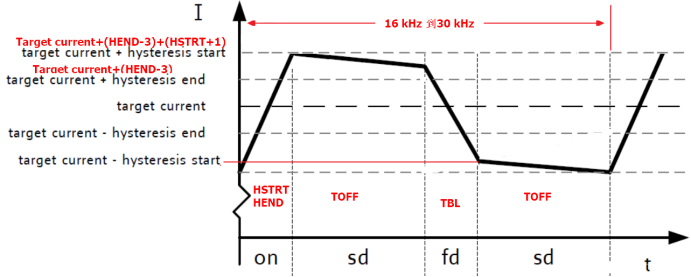
如上圖,處于on階段,MOS管打開線圈電流開始上升,當電流大target+HSTRT,MOS管關斷進入慢衰減階段,慢衰減持續TOFF設置的時間后,進入快衰減階段,當電流下降到target-HSTRT時,進入第二慢衰減階段,第二慢衰減階段又持續TOFF設置的時間后,完成一個斬波周期。
進入on階段和快衰減階段首先會有TBL的消隱時間,在這段時間電流比較器不工作,之后電流比較器才開始工作,而on階段和快衰減階段又是依靠電流比較退出的,因此on階段和快衰減階段的時間一定會大于TBL。
要把斬波頻率控制在16 kHz 到30 kHz。其中on階段的時間由target、HSTRT、HEND決定,由HSTRT、HEND控制的滯環寬度會影響on階段的時間。兩個慢衰減時間由TOFF決定。
慢衰減階段通常占靜止斬波周期的約30%-70%,并且對于降低電機和驅動器功耗是重要的。
2、磁滯參數HSTRT和HEND設置
為找到最佳設置,通常從一個低的磁滯設置(例如HSTRT=0,HEND=0 )開始,逐漸增加HSTRT,直到電機在低速設置下平穩運行。可通過測量電流探頭或采樣電阻上電壓測量電機電流時來更好的檢查這一點。如果磁滯設置太小,正弦波的兩個半波零點附近的之間有小的畸變。在中速(即每秒100至400步)時,滯環設置過小將導致電機嗡嗡聲和振動增加。過高的滯環設置將導致斬波頻率降低和斬波噪聲增加,同時不會對波形產生任何益處。
較高電流的電機通常也具有較低的線圈電阻,因此為磁滯選擇低到中的默認值(例如,有效滯環= 4 )通常適合大多數應用。設置過低將導致微步精度降低,而設置過高將導致更多斬波噪聲和電機功耗。當用示波器測量線圈在中等電流下電機靜止時的采樣電阻電壓時,過低的設置會顯示快衰減階段小于消隱時間。調整磁環讓快衰減時間比消隱時間稍長是最佳設置。如果難以達到要求,則可以減少TOFF設置。
3、經典恒定關斷時間斬波器
經典的恒定關斷時間斬波器是spreadCycle的替代方案。在參數調節后,同樣也有良好的性能。在dcStep的全步操作中,系統會與經典恒定關斷時間斬波器(自動)結合工作。經典的恒定關斷時間斬波器在每個導通階段之后采用固定時間的快速衰減。
八、選擇采樣電阻
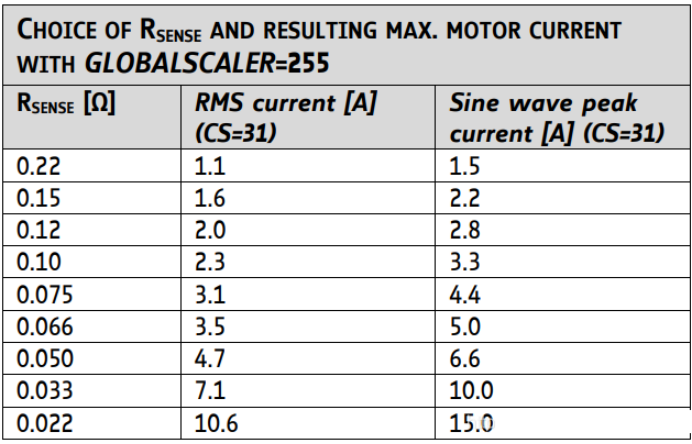
采樣電阻阻值決定了上限電流,由寄存器IRUN、IHOLD 和GLOBALSCALER 設置所需的具體電流值,公式為:上限電流*(GLOBALSCALER/256)*(IRUN/31)。當GLOBALSCALER = 0時,GLOBALSCALER 實際取值256。因此當 GLOBALSCALER = 0,IRUN = 31時,電流值為最大。RMS 電流的計算公式:
VFS :滿量程電壓 (請參考電氣參數VSRT)。
具體選擇可以參考下表:
九、stallGuard2
與stallGuard2相關的只有3個配置參數:SGT、sfilt、SG_RESULT。
SGT:控制堵轉檢測的靈敏度。值越低,靈敏度越高。
sfilt:測量濾波模式使能控制。如果設置,測量頻率會降低到每個電機電氣周期測量一次( 4 個全步)。測量頻率的降低會導致檢測靈敏度下降(靈敏度降低4倍),但是同時能提高堵轉判斷的準確度。
SG_RESULT:stallGuard2的測量結果。讀數越高表示機械負載越小。
SG_RESULT和電機負載的關系如下:
在啟動stallGuard2 和coolStep 之前,先通過SGT 設置調節stallGuard2 的敏感度。
1、調整 stallGuard2 閾值 SGT的步驟
步驟1:以適當的速度運行電機,并監控SG_RESULT。
步驟2:緩慢增加電機的機械負載。如果電機在SG_RESULT 達到零之前停止,說明靈敏度太低了,要減小SGT。如果SG_RESULT在電機停止之前達到零,則增大SGT。SGT 是有符號的,可正可負。
SGT調整好的判斷依據:在電機處于再增加一點負載就會堵轉的狀態時,SG_RESULT的值處于0到100之間,并且這時把負載去掉SG_RESULT會增加100或更多。
SGT可根據電機速度或使用環境設置多個值,以達到最可靠的堵轉檢測效果。
2、用stallGuard實現歸零
讓電機反轉到歸零點卡死,通過stallGuard檢測到電機堵轉來實現歸零。由于stallGuard需要一定的速度才能工作(速度閾值由TCOOLTHRS設定),請確保起始點離零點足夠遠,以提供加速階段所需的距離。設置SGT的值和斜坡發生器寄存器后,TMC5160開始控制電機往零點方向運動,如果同時打開了堵轉停止功能(SW_MODE 中設置sg_stop),一旦檢測到堵轉,斜坡發生器會停止運動并設定VACTUAL為零,從而停止電機,電機此時的位置即為零點。
2、stallGuard2 操作局限性
stallguard2在極端電機速度下運行不可靠: 1)、非常低的電機速度(對于許多電機,每秒不到一圈)會產生低反電動勢,使測量不穩定,同時還要考慮環境條件(溫度等)。2)、非常高的電機速度,因電機反電動勢達到電源電壓電機線圈無法輸出正弦電流驅動,也導致較差的響應。
十、coolStep
coolStep能在保證電機正常轉動的情況下自動降低電機電流。與之相關的參數有兩個:
SEMIN:閾值下限。4 位無符號整數。如果SG_RESULT低于此閾值,coolStep 會增加兩個線圈的電流。
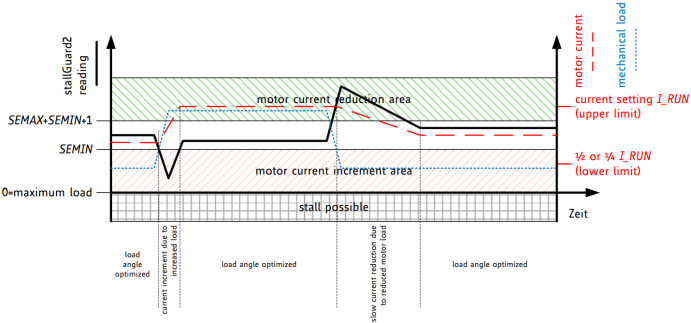
上圖顯示了coolStep 的工作過程:黑線代表SG_RESULT測量值。藍線表示電機上的機械負載。紅線表示電機線圈的電流。
當負載增加時,SG_RESULT 下降到SEMIN以下,coolStep 增加電流。當負載減小時,SG_RESULT 上升到(SEMIN + SEMAX + 1 ) * 32以上,電流減小。
此外還有幾個參數:
SEUP:電流增加步長。當SG_RESULT低于SEMIN,電流增加SEUP。
SEDN:電流減少步長。當SG_RESULT高于(SEMIN + SEMAX + 1 ),電流減少SEDN。
SEIMIN:電流下限。無論coolStep如果減少電流,電流不能低于本值。
1、響應時間
為了快速響應增加的電機負載,可以使用大的電流增量步長SEUP。如果電機負載變化緩慢,可以使用較低的電流增量步長來避免電機振蕩。如果使能sfilt 控制的濾波器,測量速率和調節速度將降低4 倍。
十一、STEP/DIR接口
STEP和DIR輸入接口提供了與許多現有運動控制器兼容的簡單標準接口。步進脈沖內插器(microPlyer)將提供高分辨率細分控制,讓一些最開始用粗細分設計應用中的電機運行更平滑。如果使用外部步進信號輸入 ,則可以關閉芯片內部集成的運動控制器。在這種情況下,唯一保持活動狀態的運動控制器寄存器是寄存器IHOLD _ IRUN。
1、時序
當CHOPCONF寄存器中的dedge模式位被設置時,STEP的雙邊沿都有效 。如果dedge 模式位清零,則只有上升沿有效。STEP 和DIR 引腳與系統時鐘同步。內部模擬濾波器消除信號上的毛刺,例如由PCB 過長引起的毛刺。如果信號源遠離芯片,特別是如果信號通過電纜傳輸,信號應該被濾波處理或差分傳輸。
2、改變分辨率
TMC5160內部有一個1024個正弦波條目的微步表,用于產生電機線圈的正弦電流。這1024 個條目對應于一個電周期或四個全步。微步分辨率設置決定了查表的步長。DIR極性決定查表的方向是增加( DIR = 0 )還是減少( DIR = 1 )。微步分辨率分別決定增量和減量。在最大分辨率(256細分)下,定序器每個STEP脈沖前進一步。128細分,定序器前進兩步。如果是整步則定序器前進256步。
定序器具有特殊的配置,允許在任何時候可以在不同的細分設置之間無縫切換。當切換到較低的細分分辨率時,它會計算目標。
分辨率內最近的步長,并讀取該位置的當前向量。這種行為對于像全步和半步這樣的低分辨率尤其重要,因為當比較電機順時針和逆時針運行時,步進序列中的任何故障都會導致不對稱運行。
審核編輯黃宇
-
步進電機
+關注
關注
152文章
3152瀏覽量
149031 -
引腳
+關注
關注
16文章
1530瀏覽量
52202
發布評論請先 登錄
TMC5160 步進電機驅動控制芯片trinamic
86 步進電機和脈沖+方向驅動一體開源分享:基于 TMC2160
TMC2160電機驅動器
如何利用STM32實現TMC5160的轉動?
電機驅控芯片:TMC5160介紹與使用
使用STM32簡單控制TMC5160驅動步進電機
TMC5160芯片的特點性能及應用
電機驅動TMC5160詳解

TMC2160步進電機驅動芯片
TMC5160步進電機驅動控制芯片工作原則





 工商網監
工商網監
評論