") One-box線控制動(dòng)系統(tǒng)在輔助駕駛和自動(dòng)駕駛中的應(yīng)用
One-box線控制動(dòng)系統(tǒng)在輔助駕駛和自動(dòng)駕駛中的應(yīng)用
根據(jù)制動(dòng)執(zhí)行機(jī)構(gòu)的不同,線控制動(dòng)系統(tǒng)可以分為液壓式線控制動(dòng)系統(tǒng)(Electro-Hydraulic Brake, EHB)和機(jī)械式線控制動(dòng)系統(tǒng)(Electro-Mechanical Brake, EMB)。其中,EHB 以傳統(tǒng)的液壓制動(dòng)系統(tǒng)為基礎(chǔ),用電子器件替代了部分機(jī)械部件的功能,使用制動(dòng)液作為動(dòng)力傳遞媒介,同時(shí)具備液壓備份制動(dòng)系統(tǒng),是目前的主流技術(shù)方案。進(jìn)一步地,根據(jù)集成度的高低,EHB 可以分為Two-box 和One-box 兩種技術(shù)方案。
上期文章對(duì)One-box線控制動(dòng)系統(tǒng)的工作原理做了介紹,本期將對(duì)One-box如何滿足輔助駕駛和自動(dòng)駕駛對(duì)制動(dòng)系統(tǒng)的要求展開討論。
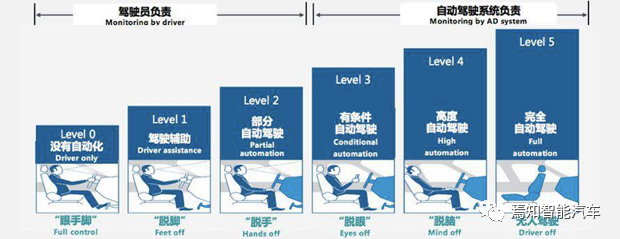
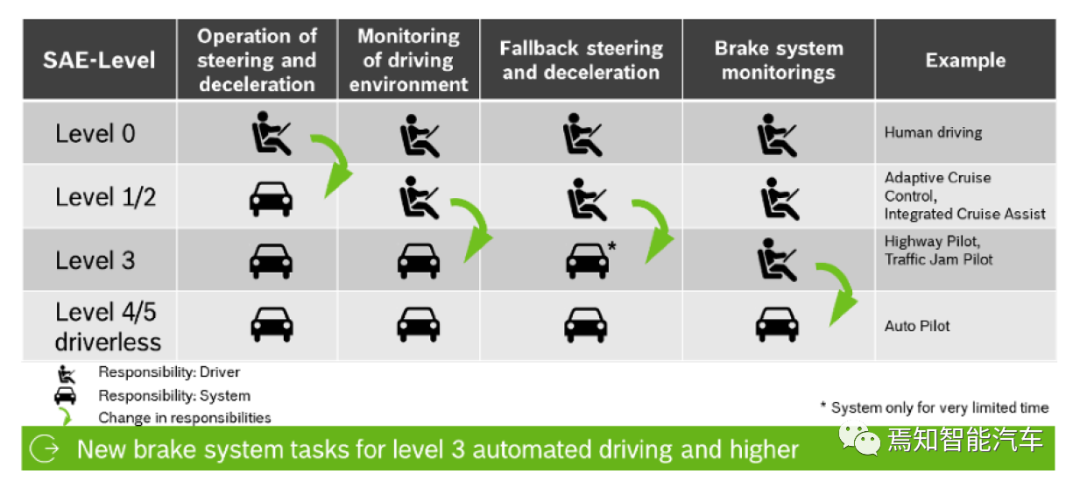
SAE J3016對(duì)汽車自動(dòng)駕駛分級(jí)標(biāo)準(zhǔn)
01輔助駕駛系統(tǒng)對(duì)One-box的要求
對(duì)輔助駕駛汽車而言,當(dāng)系統(tǒng)出現(xiàn)故障以后,要求系統(tǒng)正確及時(shí)地向駕駛員報(bào)告故障,由駕駛員承擔(dān)將車輛運(yùn)行到安全狀態(tài)(safe state)的責(zé)任,而制動(dòng)系統(tǒng)持續(xù)提供制動(dòng)能力是幫助駕駛員完成這一任務(wù)的關(guān)鍵,歐盟ECE R13和國標(biāo)GB 21670對(duì)制動(dòng)系統(tǒng)的應(yīng)急制動(dòng)能力提出了強(qiáng)制要求:
當(dāng)基礎(chǔ)制動(dòng)功能失效后,在駕駛員踏板輸入500Nm的情況下,應(yīng)急制動(dòng)的平均減速度不小于2.44m/s2.
為實(shí)現(xiàn)這一要求,One-box設(shè)計(jì)了機(jī)械備份(Hydraulic Backup),保證基礎(chǔ)助力系統(tǒng)發(fā)生失效后,駕駛員依舊能夠通過踩制動(dòng)踏板產(chǎn)生減速度。以博世One-box產(chǎn)品IPB產(chǎn)品為例,當(dāng)主動(dòng)建壓模塊無法正常工作(如電源故障,助力電機(jī)故障等)時(shí),系統(tǒng)進(jìn)入機(jī)械備份模式,此時(shí)閥1,4,5關(guān)閉,2,3打開,駕駛員踩下踏板可推動(dòng)制動(dòng)主缸內(nèi)的活塞移動(dòng),將制動(dòng)液推入四個(gè)輪缸并產(chǎn)生車輛減速度,如下圖所示。
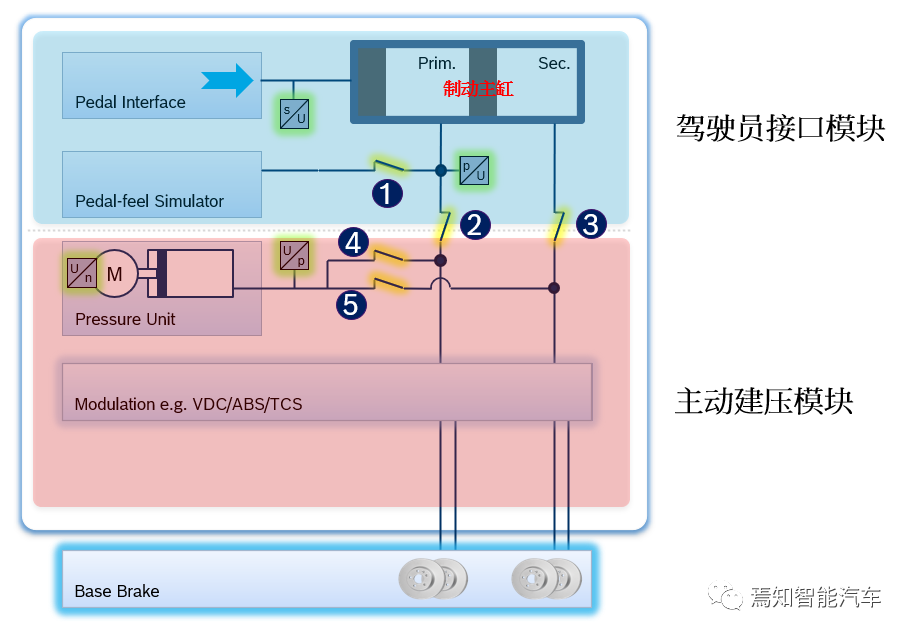
博世IPB(Integrated Power Brake)工作示意圖,圖片來自網(wǎng)絡(luò)
制動(dòng)主缸為雙腔式設(shè)計(jì),主腔(Primary Pressure Chamber)和副腔(Secondary Pressure Chamber)的制動(dòng)管路分別連接兩個(gè)車輪的輪缸,具體連接哪兩個(gè)車輪取決于’X’型布置或’II’型布置,乘用車通常為’X’型布置。為考慮機(jī)械備份模式下主腔或副腔發(fā)生制動(dòng)管路泄露的極端情況,博世IPB對(duì)機(jī)械備份下的制動(dòng)設(shè)計(jì)提出了更高的要求,確保沒有發(fā)生泄露的制動(dòng)回路仍然可以滿足駕駛員踏板輸入500Nm的情況時(shí)提供不小于2.44m/s2的減速度。在這樣的設(shè)計(jì)下,當(dāng)沒有發(fā)生管路泄露時(shí),IPB降級(jí)到機(jī)械備份模式后500Nm的踏板輸入能產(chǎn)生4.88m/s2的減速度。
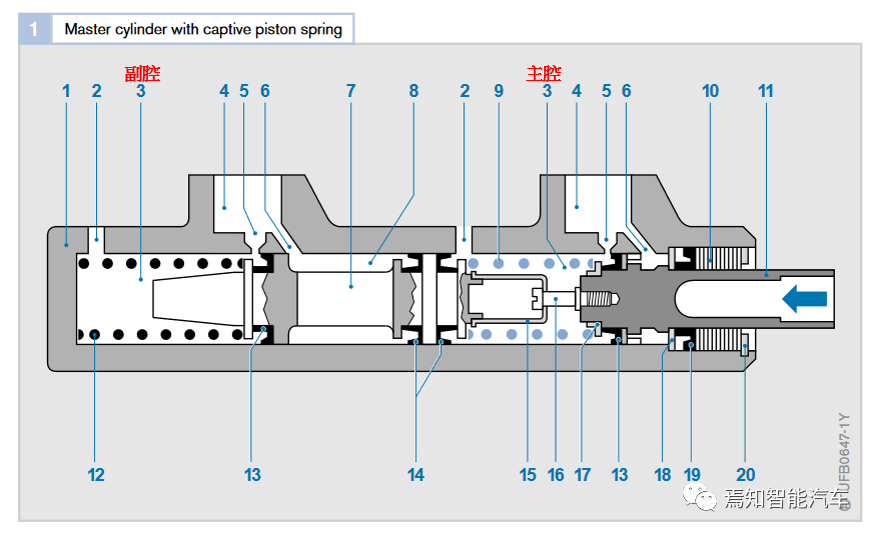
制動(dòng)主缸示意圖,圖片來自網(wǎng)絡(luò)
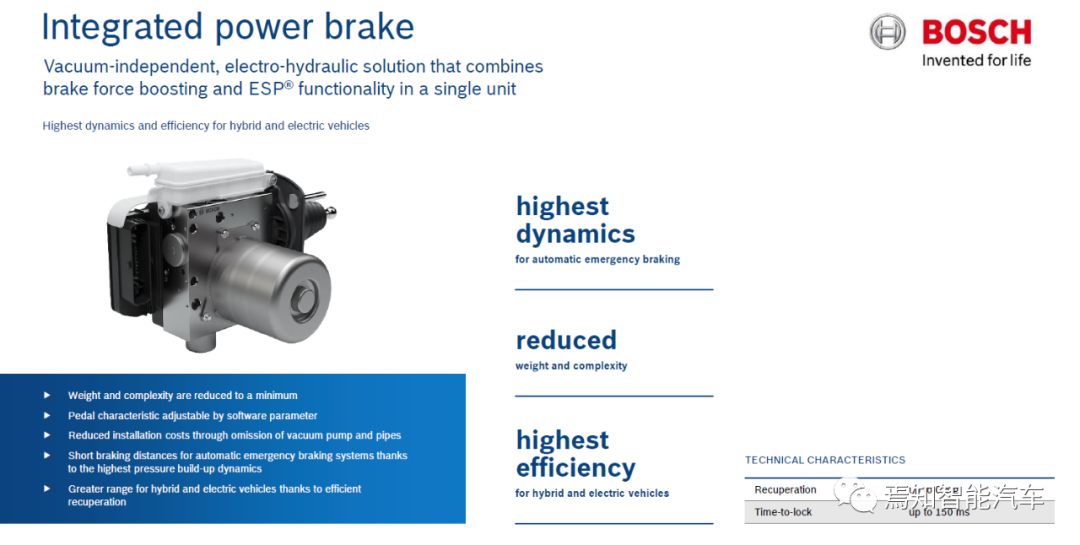
博世IPB(Integrated Power Brake)基礎(chǔ)介紹,圖片來自官網(wǎng)
值得一提的是,因?yàn)镺ne-box屬于制動(dòng)踏板解耦結(jié)構(gòu),因此在制動(dòng)主缸的設(shè)計(jì)上, One-box通常會(huì)縮小缸徑,在助力功能正常的情況下,可以在保證不影響駕駛員踏板感的情況下同樣能夠保持很好的建壓效果。但是缸徑縮小的設(shè)計(jì)需要考慮機(jī)械備份下的影響。對(duì)當(dāng)前的汽車設(shè)計(jì)來說,制動(dòng)踏板的踏板比和踏板最大深度是無法改變的,而在制動(dòng)主缸長(zhǎng)度不變的情況下,缸徑的縮小意味著相比于eBooster或者真空助力器,同樣的制動(dòng)踏板深度下One-box能流入輪缸的制動(dòng)液會(huì)減少。所以,為保證機(jī)械備份能夠滿足法規(guī)要求,制動(dòng)主缸的結(jié)構(gòu)設(shè)計(jì)需要考慮其中。
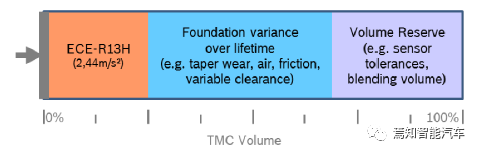
TMC液量示意圖,圖片來自‘8th International Munich Chassis Symposium 2017’
02自動(dòng)駕駛系統(tǒng)對(duì)One-box的要求
根據(jù)SAE J3016對(duì)汽車自動(dòng)駕駛分級(jí)標(biāo)準(zhǔn),對(duì)于Level 3及Level 3以上的自動(dòng)駕駛系統(tǒng),要求在出現(xiàn)單一故障的情況下,系統(tǒng)依舊能夠提供制動(dòng)或轉(zhuǎn)向能力以保證車輛能夠進(jìn)入安全狀態(tài),避免造成人身傷害。由于完成這一安全目標(biāo)的責(zé)任方從駕駛員變成了自動(dòng)駕駛系統(tǒng),這意味著One-box制動(dòng)系統(tǒng)中依賴制動(dòng)踏板輸入的機(jī)械備份無法滿足這一安全目標(biāo)。
自動(dòng)駕駛系統(tǒng)對(duì)制動(dòng)提出了新要求,圖片來自‘8th International Munich Chassis Symposium 2017’
目前業(yè)界普遍達(dá)成一致的是支持高速自動(dòng)駕駛(HAD, Highly Automated Driving)的汽車至少需要下表包含的冗余設(shè)計(jì),才能保證車輛在出現(xiàn)單一故障后系統(tǒng)能夠及時(shí)進(jìn)入合理的安全狀態(tài)。其中,無論安全狀態(tài)定義為“停在當(dāng)前車道”或“停在應(yīng)急車道”,制動(dòng)系統(tǒng)冗余都不可或缺。
| 冗余系統(tǒng)要素 | 原因 |
| 供電系統(tǒng)冗余 | 當(dāng)單一鏈路出現(xiàn)信號(hào)中斷,系統(tǒng)可實(shí)現(xiàn)信息的無縫安全銜接 |
| 通訊冗余 | 主電源失效后,備份電源能夠支撐ECU完成安全降級(jí)動(dòng)作 |
| 感知冗余 | 多傳感器數(shù)據(jù)融合技術(shù)可以保證車輛行駛構(gòu)成中精準(zhǔn)實(shí)現(xiàn)物體及行人的識(shí)別,從而支持車輛時(shí)刻做出正確的控制行為 |
| 上層決策系統(tǒng)冗余 | 兩個(gè)大腦互相監(jiān)督、互為備份,主大腦故障發(fā)生時(shí),備份大腦及時(shí)接管 |
| 制動(dòng)冗余 | 主制動(dòng)系統(tǒng)失效后,備份系統(tǒng)依然提供一定的制動(dòng)能力來維持制動(dòng)控制及制動(dòng)穩(wěn)定性控制 |
| 轉(zhuǎn)向冗余 | 如果故障發(fā)生后的安全狀態(tài)定義為繼續(xù)運(yùn)行而不是剎停,那么當(dāng)一路轉(zhuǎn)向系統(tǒng)故障后,備份系統(tǒng)需要能夠支持車輛完成接下來的運(yùn)行場(chǎng)景中的轉(zhuǎn)彎工況 |
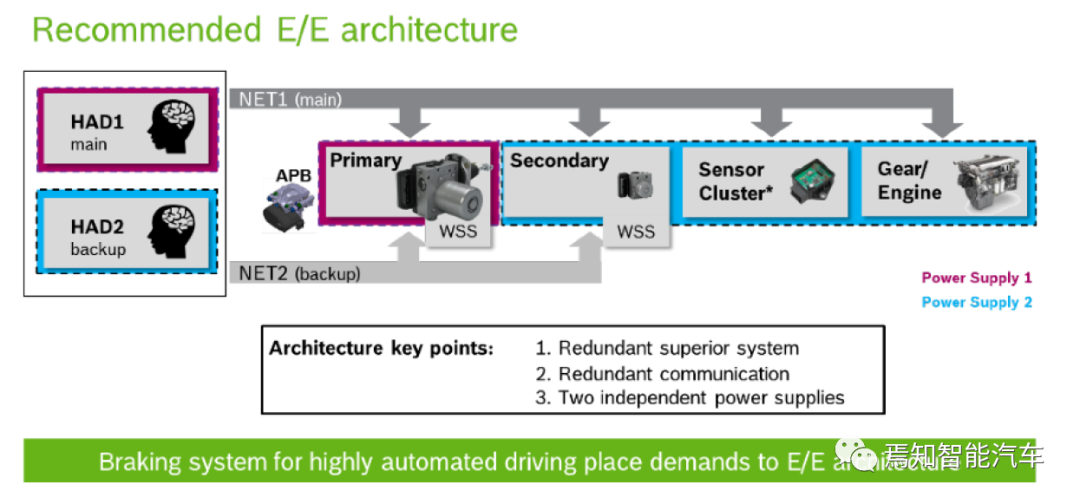
支持自動(dòng)駕駛系統(tǒng)的制動(dòng)冗余系統(tǒng)E/E架構(gòu)設(shè)計(jì),圖片來自‘8th International Munich Chassis Symposium 2017’
為實(shí)現(xiàn)制動(dòng)冗余,One-box需要搭配一個(gè)獨(dú)立的制動(dòng)單元RBU(Redundant Brake Unit)。One-box與RBU的制動(dòng)管路連接如下圖所示,制動(dòng)主缸兩個(gè)腔出口的制動(dòng)管路除了和One-box連通外,還連通RBU的輸入端,而RBU的兩路輸出管路則在分別與IPB中的輪缸管路相連。
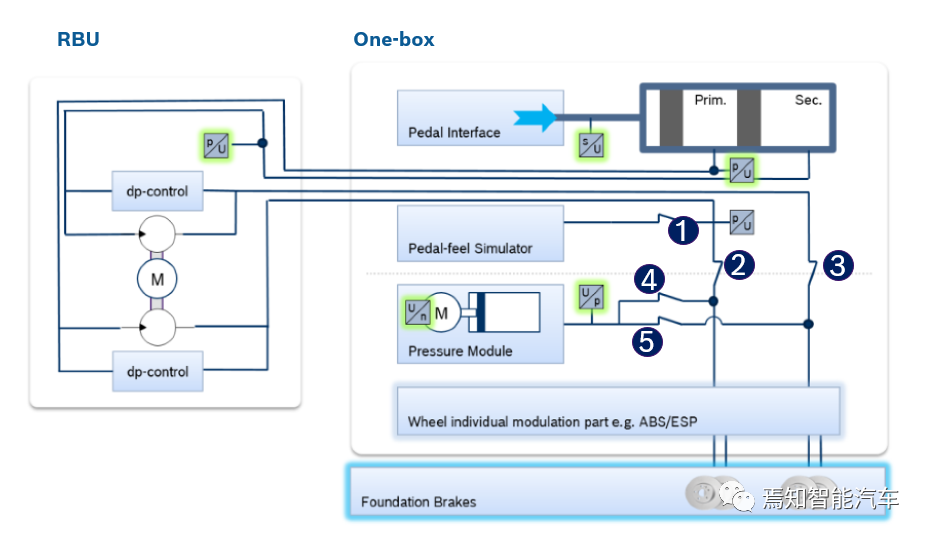
One-box與RBU管路連接示意圖,圖片來自‘8th International Munich Chassis Symposium 2017’
在正常情況下,One-box響應(yīng)制動(dòng)系統(tǒng)上層的制動(dòng)請(qǐng)求,閥1,閥2和閥3關(guān)閉,One-box主動(dòng)建壓模塊中的電機(jī)推動(dòng)推桿,將制動(dòng)液通過打開的閥4和閥5推入輪缸完成建壓。而當(dāng)One-box系統(tǒng)故障時(shí),系統(tǒng)進(jìn)入制動(dòng)備份模式,閥2和閥3打開,閥1,閥4和閥5關(guān)閉,RBU中的電機(jī)工作,將制動(dòng)主缸中的液壓通過閥2和閥3推入輪缸完成建壓。
高速自動(dòng)駕駛除了要求制動(dòng)系統(tǒng)具備基礎(chǔ)制動(dòng)功能冗余外,還要求車輛具有縱向穩(wěn)定性冗余,這就需要RBU同時(shí)具備縱向穩(wěn)定性控制的能力。目前市場(chǎng)上的RBU方案基本都是從底盤電子穩(wěn)定性系統(tǒng)(ESC, Electric Stability Controller)“減配”改造而來,能夠?qū)崿F(xiàn)縱向穩(wěn)定性控制。不同的是,RBU只能同時(shí)調(diào)節(jié)’X’型布置或’II’型布置的兩個(gè)輪端壓力而不能同時(shí)調(diào)節(jié)四個(gè)輪端壓力,所以控制性能相比于ESC會(huì)受到限制。但是由于當(dāng)One-box故障后,自動(dòng)駕駛系統(tǒng)會(huì)盡快進(jìn)入安全狀態(tài),車輛運(yùn)行時(shí)間受到很大的限制,因此從安全概率的角度,這一“減配”設(shè)計(jì)是可以接受的,同時(shí)也優(yōu)化了“One-box+RBU”的制動(dòng)組合的成本。
“One-box+RBU”的制動(dòng)組合的控制和接管策略可以總結(jié)如下(控制策略不唯一,根據(jù)E/E架構(gòu)的不同,策略可能有調(diào)整):
| 場(chǎng)景 | 制動(dòng)執(zhí)行控制器 |
| 無故障 | One-box |
| 上層主控制單元故障 | One-box |
| 上層備份控制單元故障 | One-box |
| 主網(wǎng)絡(luò)故障 | RBU |
| 備份網(wǎng)絡(luò)故障 | One-box |
| One-box故障 | RBU |
| RBU故障 | One-box |
其中,為實(shí)現(xiàn)自動(dòng)駕駛場(chǎng)景下的縱向穩(wěn)定性冗余的需求,需要搭載冗余輪速傳感器,分別為One-box本身搭載的穩(wěn)定性功能ABS和RBU端的穩(wěn)定性功能提供必要的輪速信號(hào)。目前博世基于冗余輪速傳感器推出的制動(dòng)冗余系統(tǒng)“三級(jí)ABS”方案為市場(chǎng)主流方案。
| 場(chǎng)景 | 穩(wěn)定性功能執(zhí)行單元 |
| 無故障 | One-box: fullABS (基于四個(gè)輪速傳感器單輪控制) |
| One-box單個(gè)輪速故障 | One-box: ABS degraded(基于三個(gè)輪速傳感器單輪控制) |
| One-box兩個(gè)及兩個(gè)以上輪速故障 | RBU:SBS (基于四個(gè)輪速傳感器單軸控制) |
審核編輯:湯梓紅
-
制動(dòng)系統(tǒng)
+關(guān)注
關(guān)注
0文章
136瀏覽量
16023 -
BOX
+關(guān)注
關(guān)注
0文章
16瀏覽量
13342 -
輔助駕駛
+關(guān)注
關(guān)注
1文章
245瀏覽量
15345 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14192瀏覽量
169483
原文標(biāo)題:智能底盤技術(shù)(18)| One-box線控制動(dòng)系統(tǒng)在輔助駕駛和自動(dòng)駕駛中的應(yīng)用
文章出處:【微信號(hào):阿寶1990,微信公眾號(hào):阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
自動(dòng)駕駛真的會(huì)來嗎?
細(xì)說關(guān)于自動(dòng)駕駛那些事兒
自動(dòng)駕駛的到來
無人駕駛與自動(dòng)駕駛的差別性
即插即用的自動(dòng)駕駛LiDAR感知算法盒子 RS-Box
高級(jí)安全駕駛員輔助系統(tǒng)助力自動(dòng)駕駛
UWB主動(dòng)定位系統(tǒng)在自動(dòng)駕駛中的應(yīng)用實(shí)踐
如何讓自動(dòng)駕駛更加安全?
自動(dòng)駕駛汽車的處理能力怎么樣?
自動(dòng)駕駛系統(tǒng)設(shè)計(jì)及應(yīng)用的相關(guān)資料分享
自動(dòng)駕駛技術(shù)的實(shí)現(xiàn)
自動(dòng)駕駛線控底盤VCU功能介紹
LabVIEW開發(fā)自動(dòng)駕駛的雙目測(cè)距系統(tǒng)
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 社區(qū)
- 小組
- 論壇
- 問答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:[email protected]
- 內(nèi)容合作
- 黃晶晶:[email protected]
- 內(nèi)容合作(海外)
- 張迎輝:[email protected]
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:[email protected]
- 投資合作
- 曾海銀:[email protected]
- 社區(qū)合作
- 劉勇:[email protected]
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論