 永磁同步電機磁場定向控制電流環PI調節器的參數整定
永磁同步電機磁場定向控制電流環PI調節器的參數整定
前言
本章節采用工程設計的方法,推導出電流環PI調節器參數的計算公式,由此來設計永磁同步電機磁場定向控制的電流內環PI調節器參數,并通過Matlab/Simulink對設計的PI調節器進行Bode圖分析,最后通過一個設計實例進行仿真驗證。
一、調節器的工程設計方法
要實現調節器的工程設計方法,首先要簡化問題,突出設計的主要矛盾。 簡化的基本思路就是把調節器的設計過程分成兩步:
1、選擇調節器的結構,以確保系統穩定,同時滿足所需要的穩態精度
2、再選擇調節器的參數,以滿足系統動態性能指標的要求
選擇調節器的結構,使系統能滿足所需要的穩態精度,這是設計過程中的第一步。 由于III型及III型以上的系統很難穩定,因此常把I型系統和II型系統作為系統設計的目標。
二、電流環PI調節器的參數整定
工程設計方法的原則是:先設計內環后設計外環,因此對于永磁同步電機磁場定向控制系統先設計電流內環PI調節器,將電流環校正為 典型I型系統 。
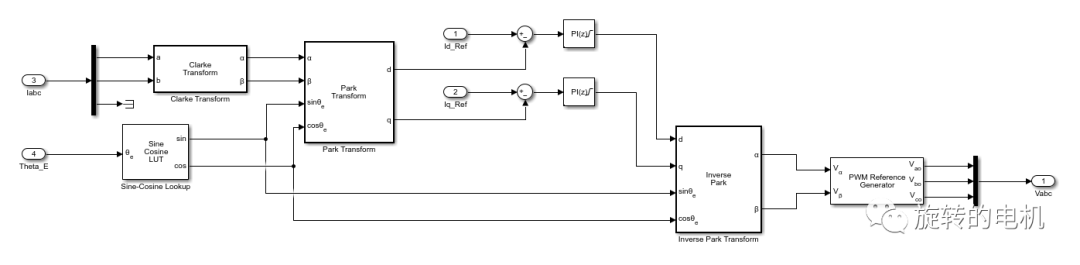
2.1.電流環的結構框圖
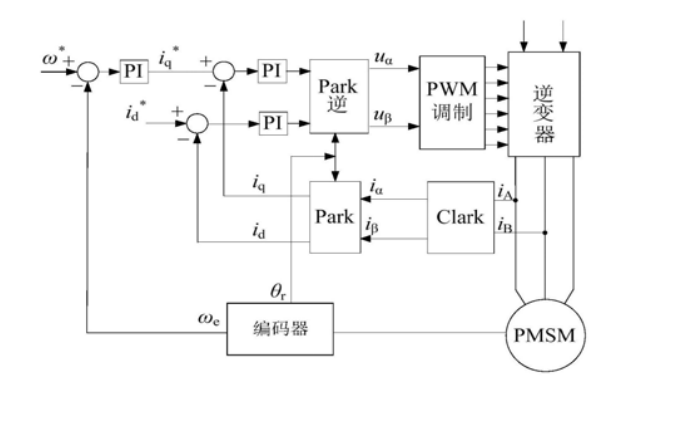
對表貼式SPM永磁同步電機,多采用Id=0來進行控制,使定子電流全部用來產生電磁轉矩。 由于dq軸電流內環具有對稱性和相似的系統特性,所以d軸和q軸的電流調節器參數整定過程類似,本章節以q軸電流調節器參數整定為例進行設計。
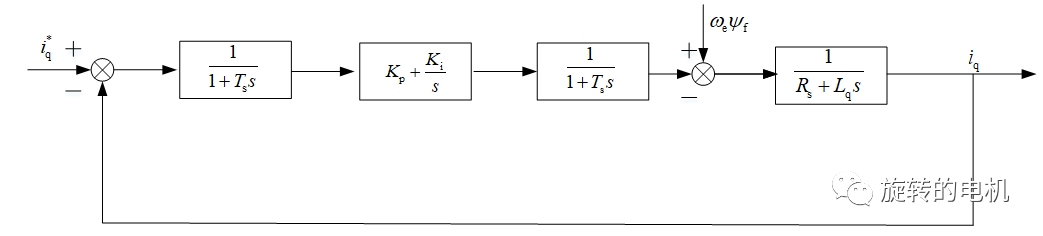
上圖為控制系統電流環結構框圖,q軸電流給定值iq*與q軸電流反饋值iq的誤差為電流環的輸入,該誤差經過PI調節器輸出q軸電壓控制信號Uq,通過Uq控制電磁轉矩。
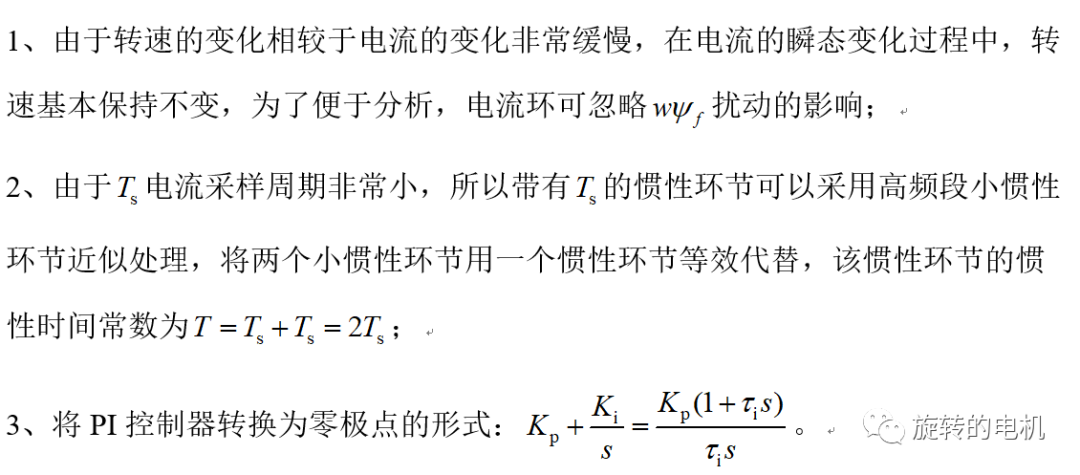
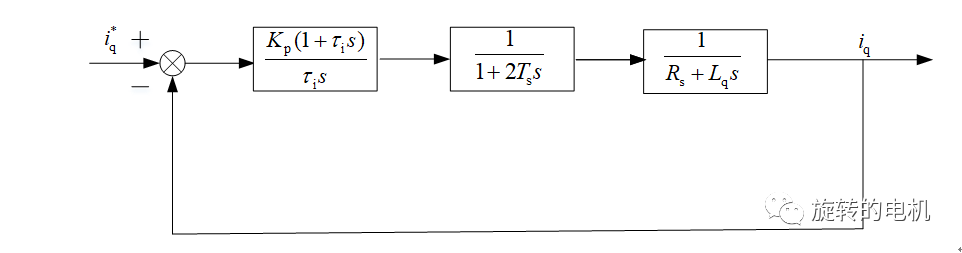
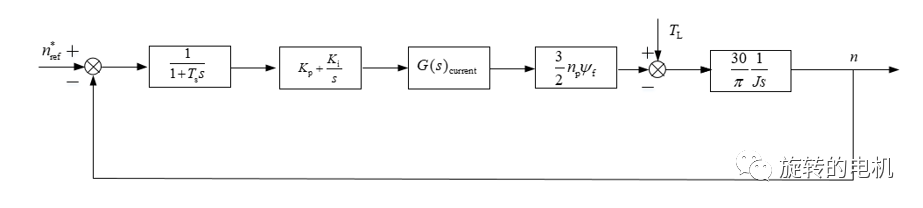
通過下述處理,進一步簡化電流環的結構框圖
電流環的結構框圖簡化為:
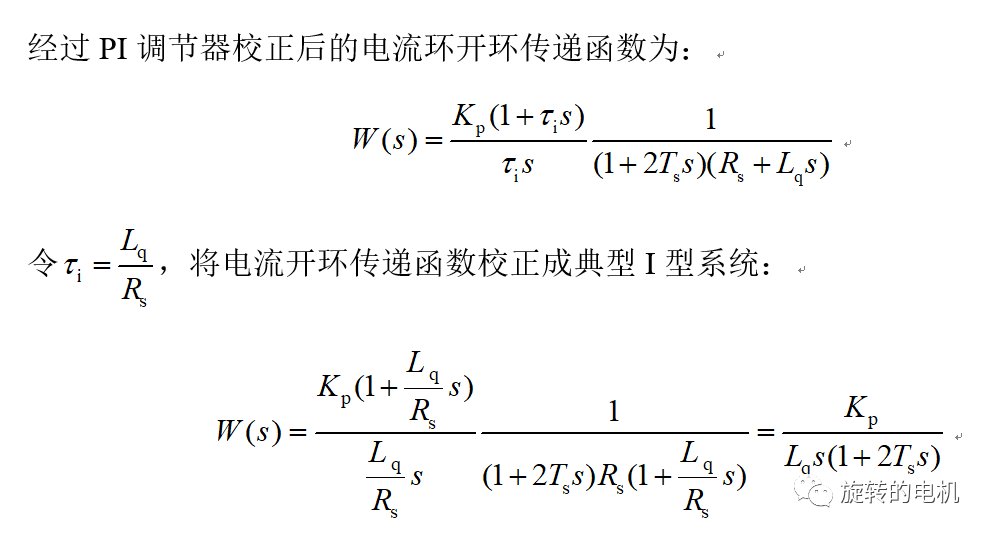
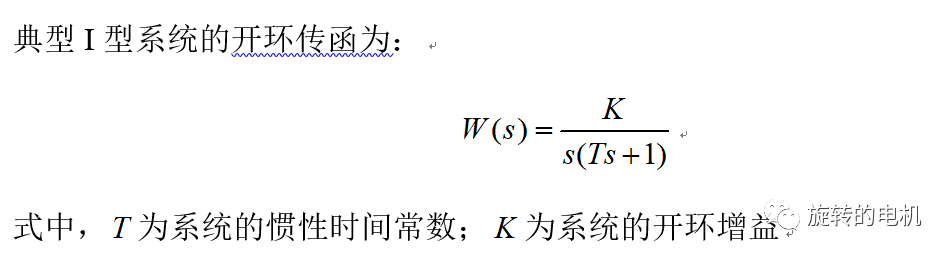
2.2.典型I型系統
取T=0.001,K=100,繪制典型I型系統的Bode圖:
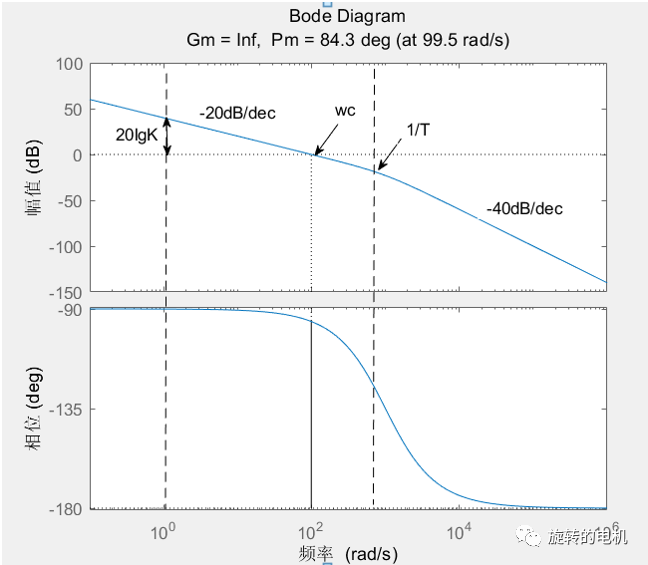
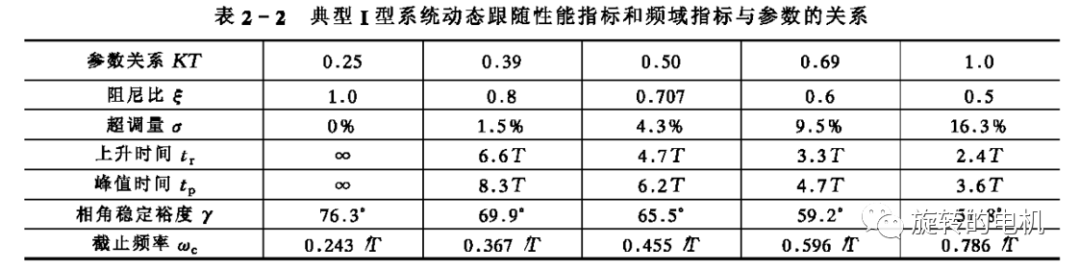
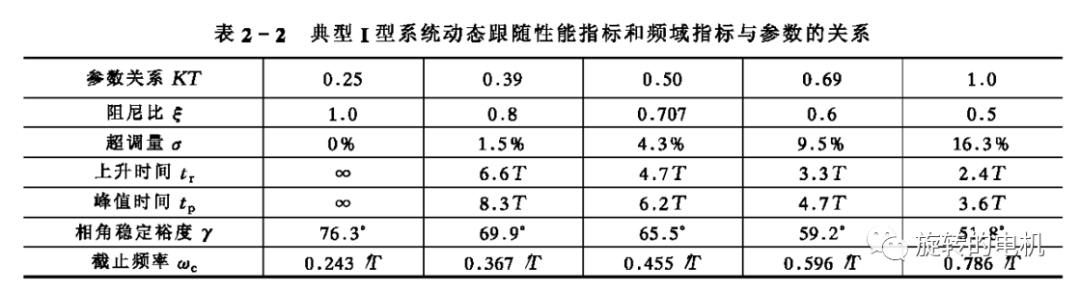
由上圖,典型I型系統對數幅頻特性的中頻段以-20dB/dec斜率穿越0分貝線,只要參數選擇能夠保證足夠的中頻帶寬度,系統就一定是穩定的。 典型I型系統中只包含開環增益K和時間常數T兩個參數,時間常數T往往是控制對象本身固有的,系統唯一可變的只有開環增益K,設計時根據性能指標選擇K的大小。
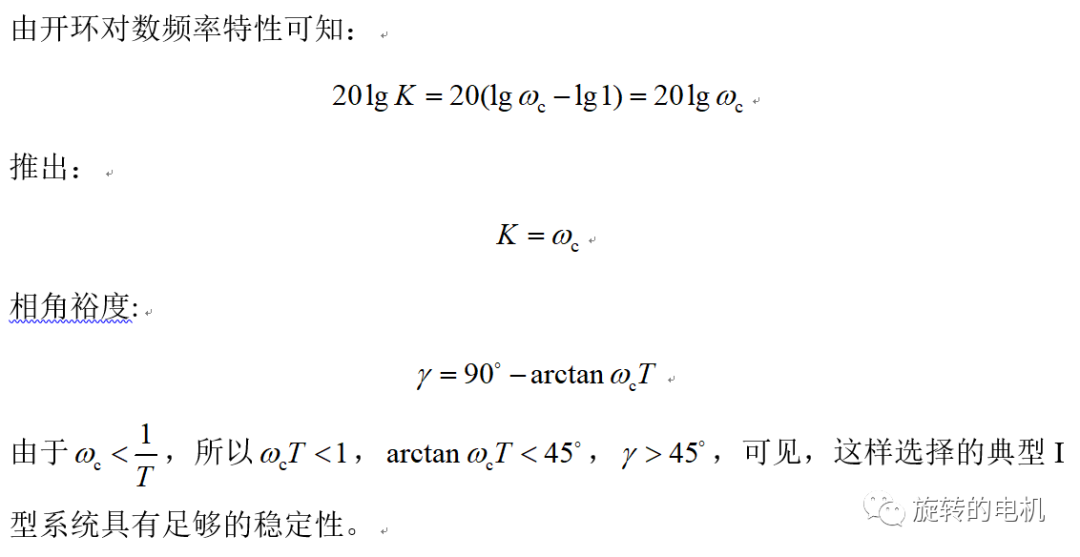
但是上式也表明,K值越大,截止頻率wc也就越大,系統的響應越快,但相角裕度越來越小,系統穩定性越來越差,系統快速性和穩定性之間存在矛盾,具體選擇參數K時二者應折中處理。 工程設計時,一般參照典型I型系統動態性能指標參數表進行K值的選取。

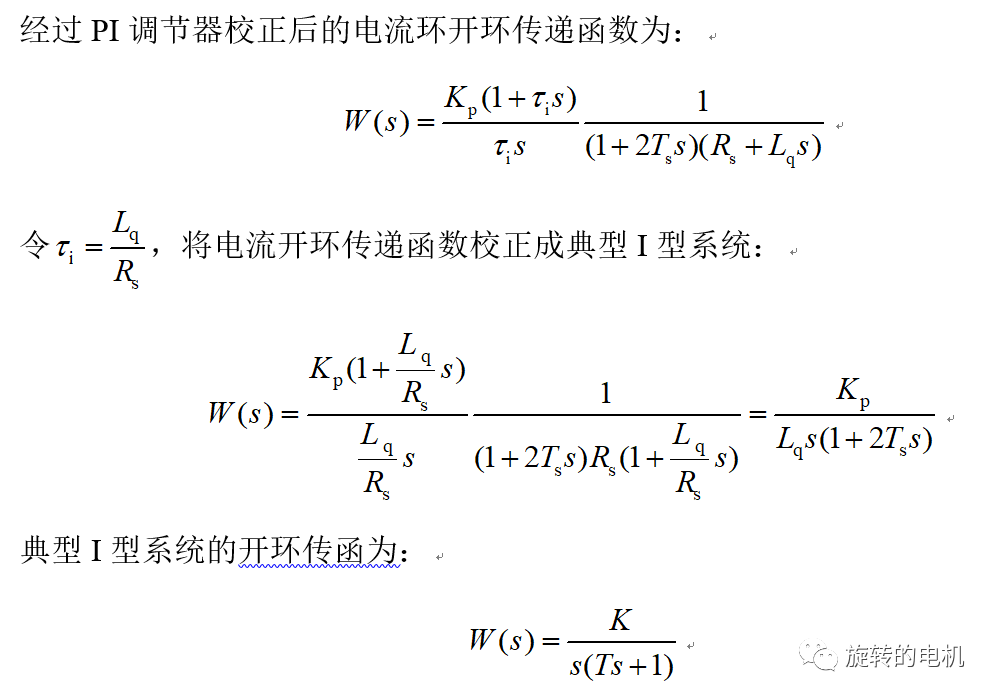
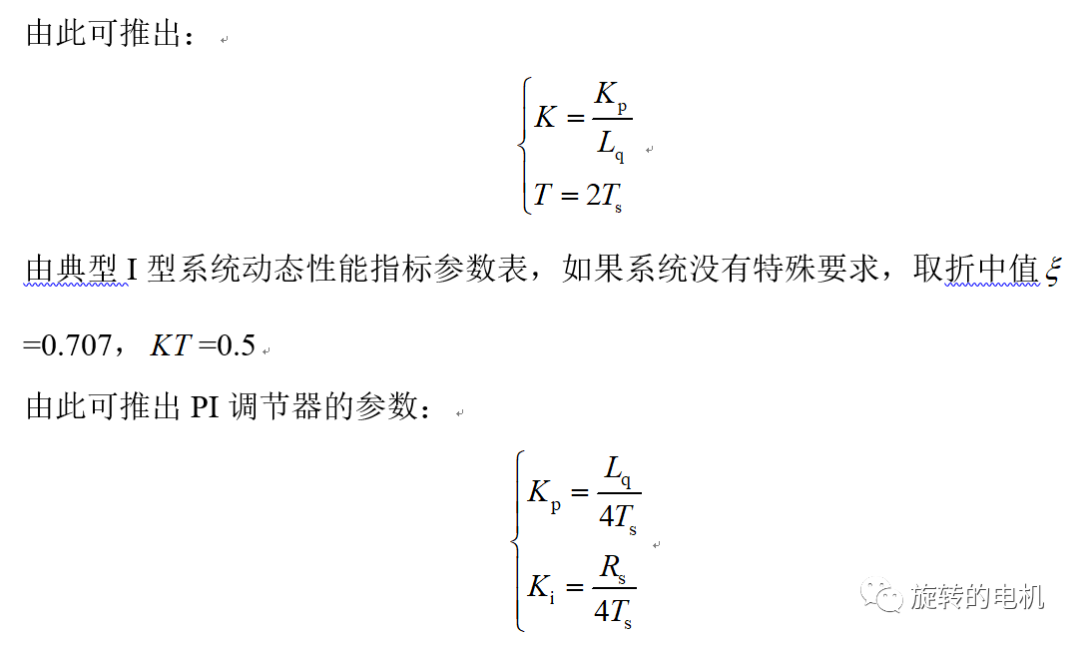
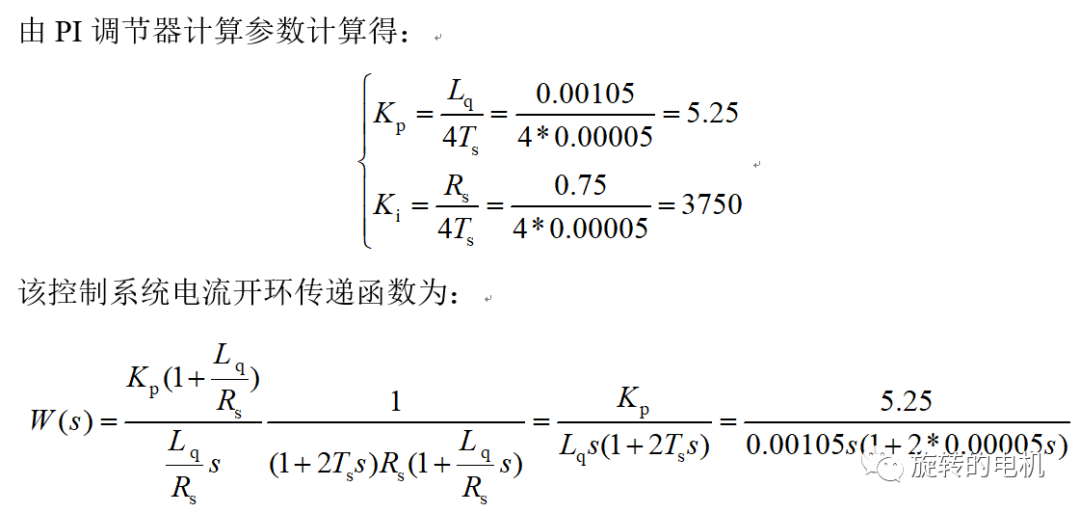
2.3.電流環PI參數整定計算公式
三、電流環PI調節器設計實例
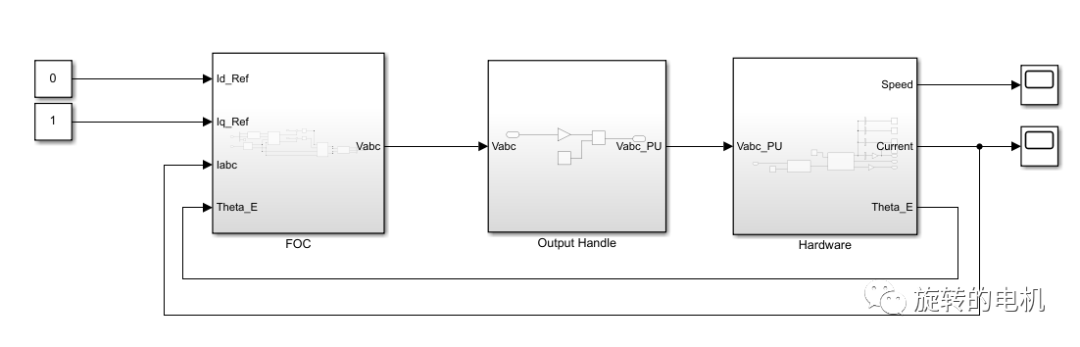
3.1.永磁同步電機磁場定向的電流閉環控制
有關永磁同步電機磁場定向的電流閉環控制的詳細分析,請閱讀。
3.2.電流環PI參數計算
電機參數如下:
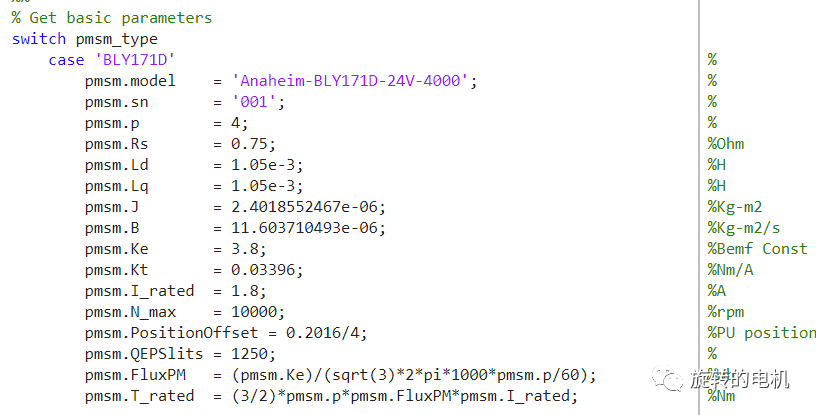
設定電流環采樣頻率為20KHz,即Ts=0.00005s,由電流環PI調節器參數計算公式得:
繪制該系統的Bode圖如下:
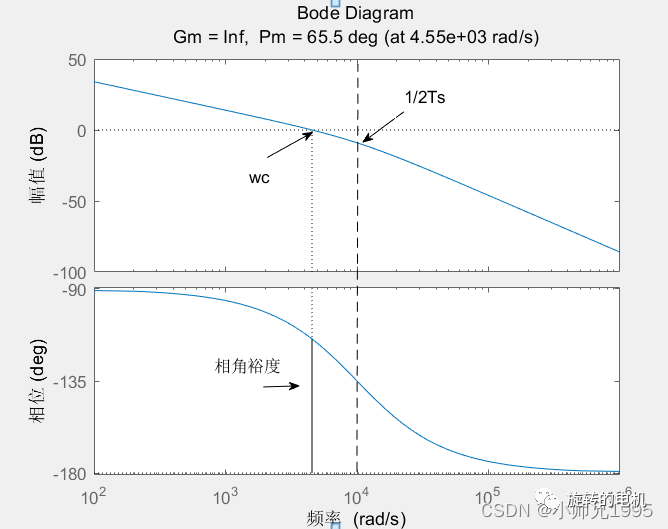
截止頻率wc=4550,相角裕度65.5度,與下表KT=0.5所述的系統性能指標一致,表明PI控制器設計成功。
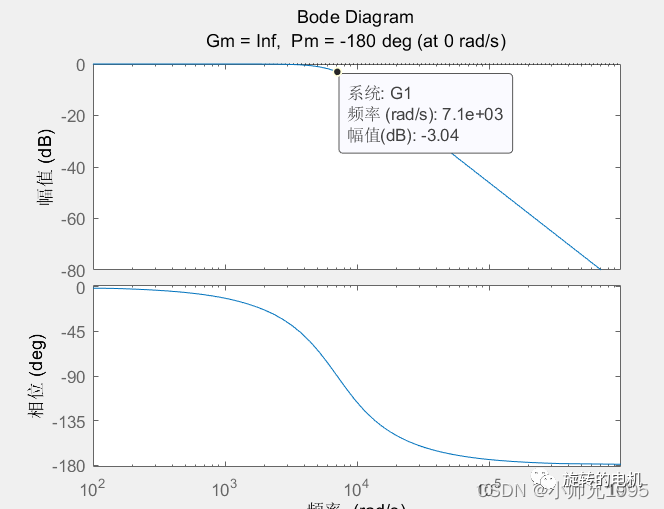
下圖為該系統閉環傳函的Bode圖,從圖中可已看出該系統的帶寬頻率約為7100rad/s。
3.3.仿真分析
將Kp=5.25,Ki=3750帶入電流閉環仿真模型dq軸的PI調節器中進行仿真分析,結果如下:
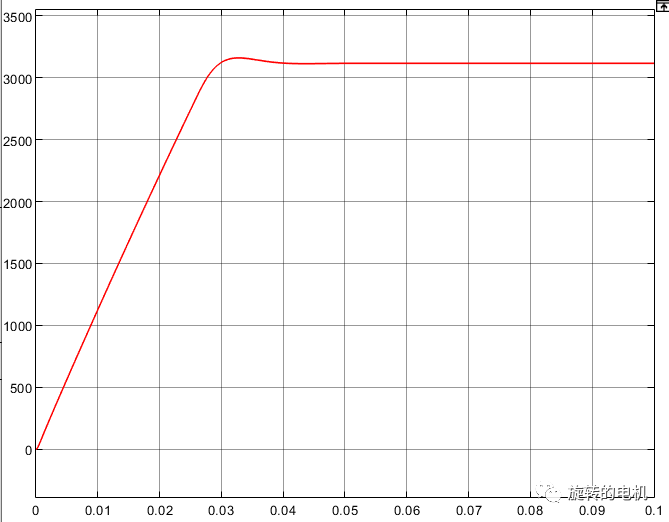
電機轉速:
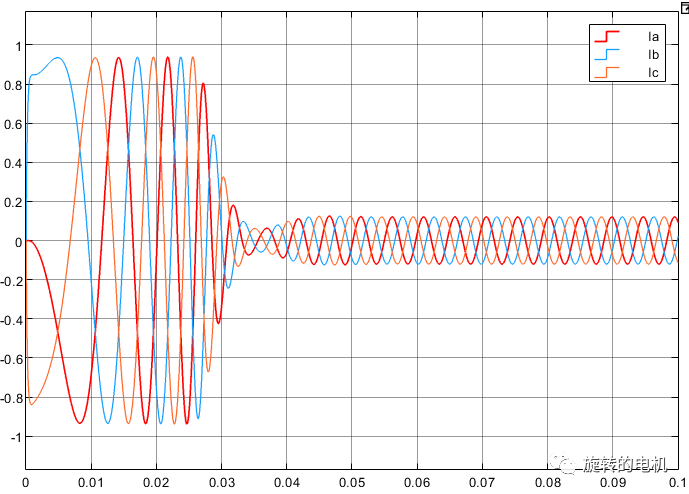
電機定子電流:
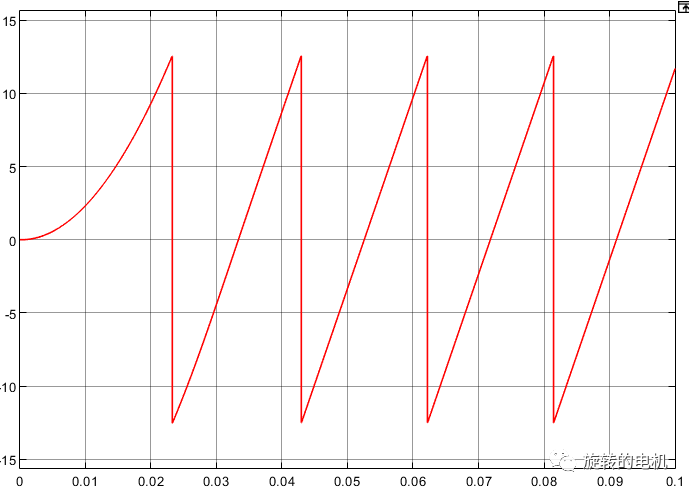
轉子位置:
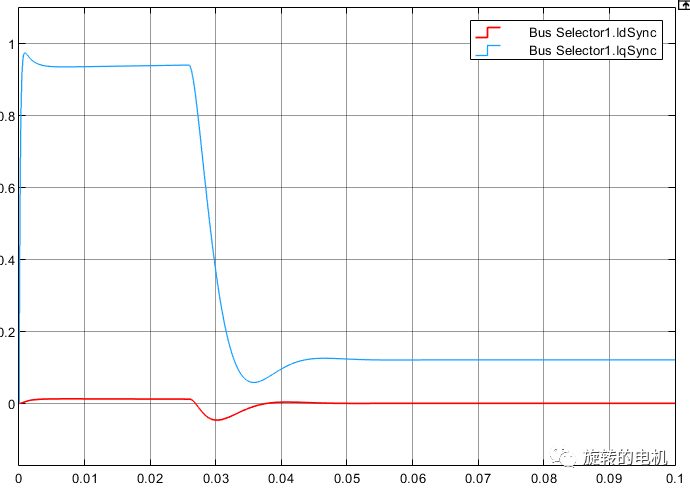
同步旋轉坐標系下的定子電流Id、Iq:電機啟動時以設定的最大電流1A進行啟動,當轉速達到穩態值時電流立即降了下來,實現了理想最優的啟動過渡過程,反映出電流控制器參數設計成功,當然如果控制效果不好可以在工程設計參數的基礎上進行參數微調。
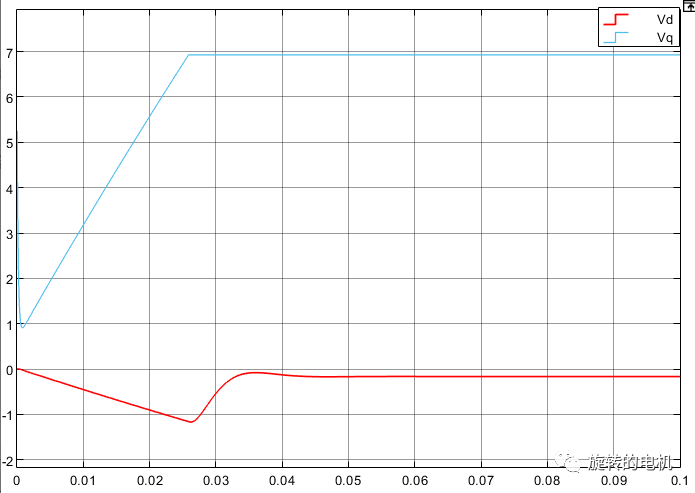
同步旋轉坐標系下的定子電壓:
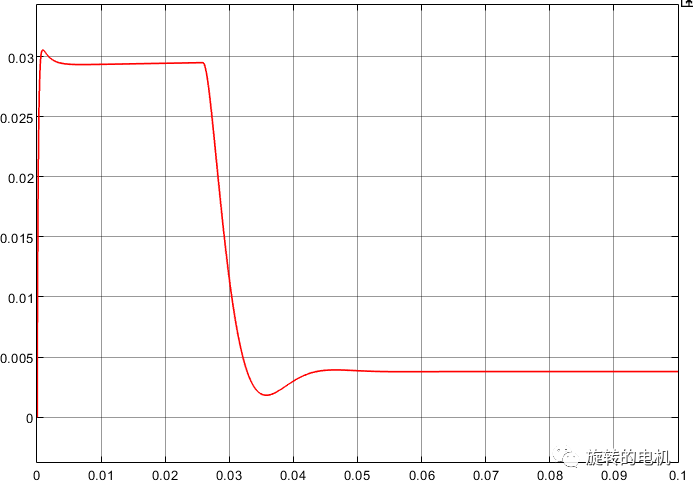
電磁轉矩:
總結
本章節采用工程設計的方法,推導出了電流環PI調節器參數的計算公式,由此來設計永磁同步電機磁場定向控制的電流內環PI調節器參數,并通過Matlab/Simulink對設計的PI調節器進行了Bode圖分析,最后通過一個設計實例進行了仿真驗證,為后文的分析奠定基礎。
-
matlab
+關注
關注
188文章
2995瀏覽量
233158 -
永磁同步電機
+關注
關注
28文章
876瀏覽量
50304 -
Simulink
+關注
關注
22文章
539瀏覽量
63605 -
磁場定向控制
+關注
關注
0文章
16瀏覽量
10533 -
PI調節器
+關注
關注
1文章
21瀏覽量
8596
發布評論請先 登錄






 工商網監
工商網監
評論