 四種最常用的環路補償網絡對比
四種最常用的環路補償網絡對比
一文幾乎窮舉了環路各種補償網絡的傳遞函數及其OPA/OTA電路實現,其中PI, TYPE 2, PID, TYPE 3是四種最常用的補償網絡。實際應用時,PID往往還會在微分項中再加一個低通濾波的極點(“不完全微分”),防止高頻增益上翹,保證一定的增益裕量GM。
此類能抑制高頻噪聲的實用PID結構,稱為PIDF(PID+Filter)。
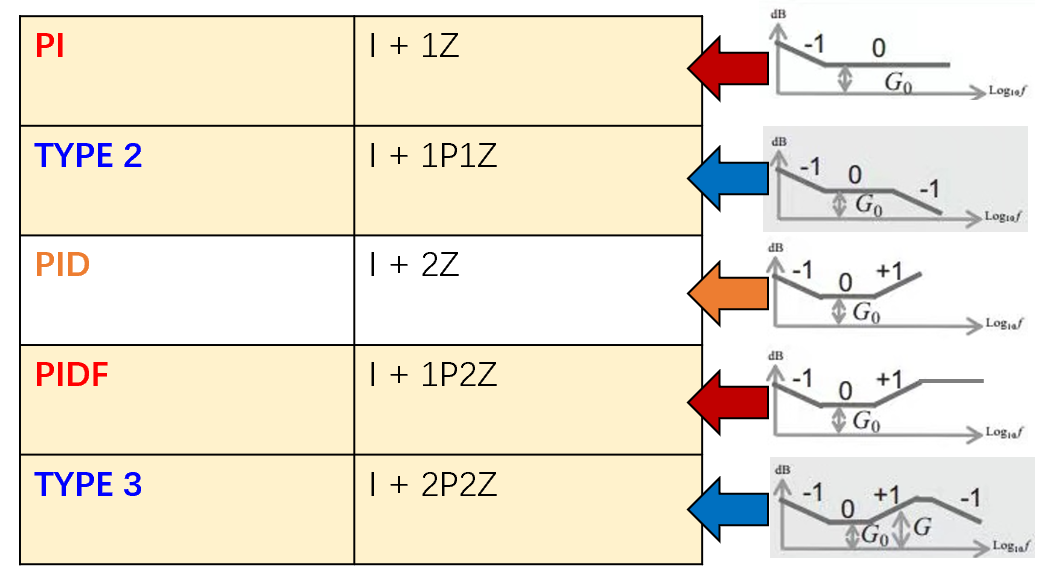
PI, 類型 2, PID, PIDF, 類型 3
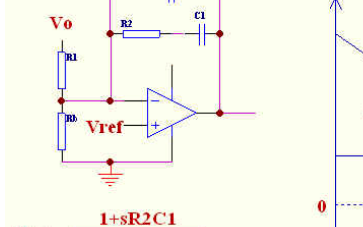
PIDF的實現方式不止一種,基于運放OPA的電路實現如下。
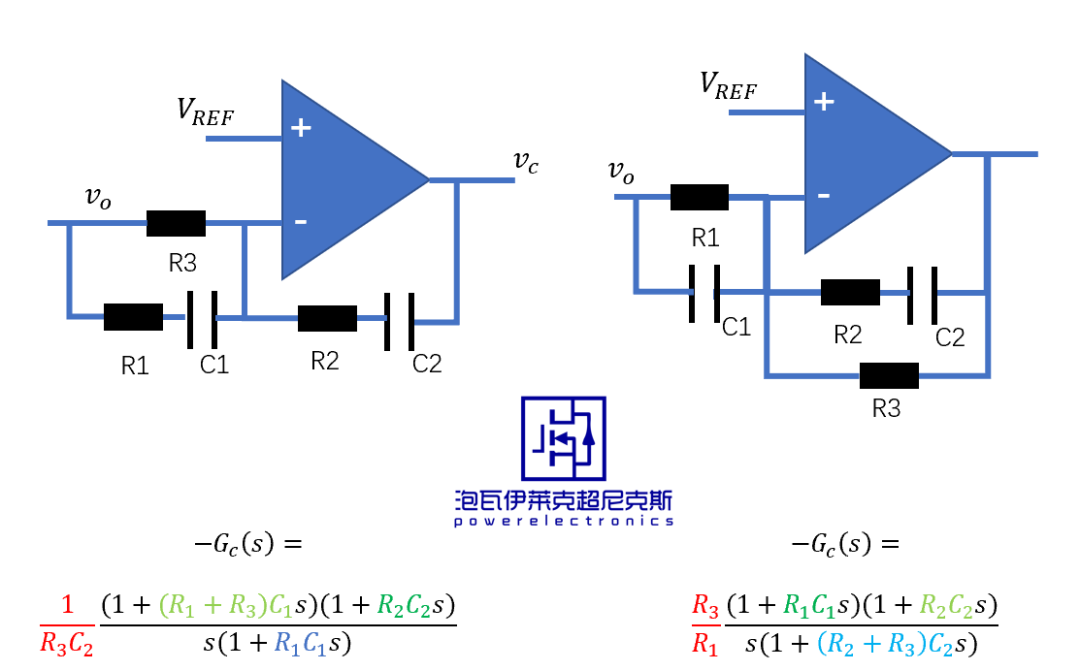
PIDF的OPA運放電路實現
四種最常用的補償
PI,類型 2,PIDF,類型 3
把PI, TYPE 2, PIDF, TYPE 3這四種補償網絡放在一起對比,更有研究的意義。
TYPE 2對比PI
都可提供最大0°的相位,但TYPE 2多了一個高頻極點,高頻增益/相位均衰減;
TYPE 3對比PIDF
都可提供最大+90°的相位,但TYPE 3多了一個高頻極點,高頻增益/相位均衰減;
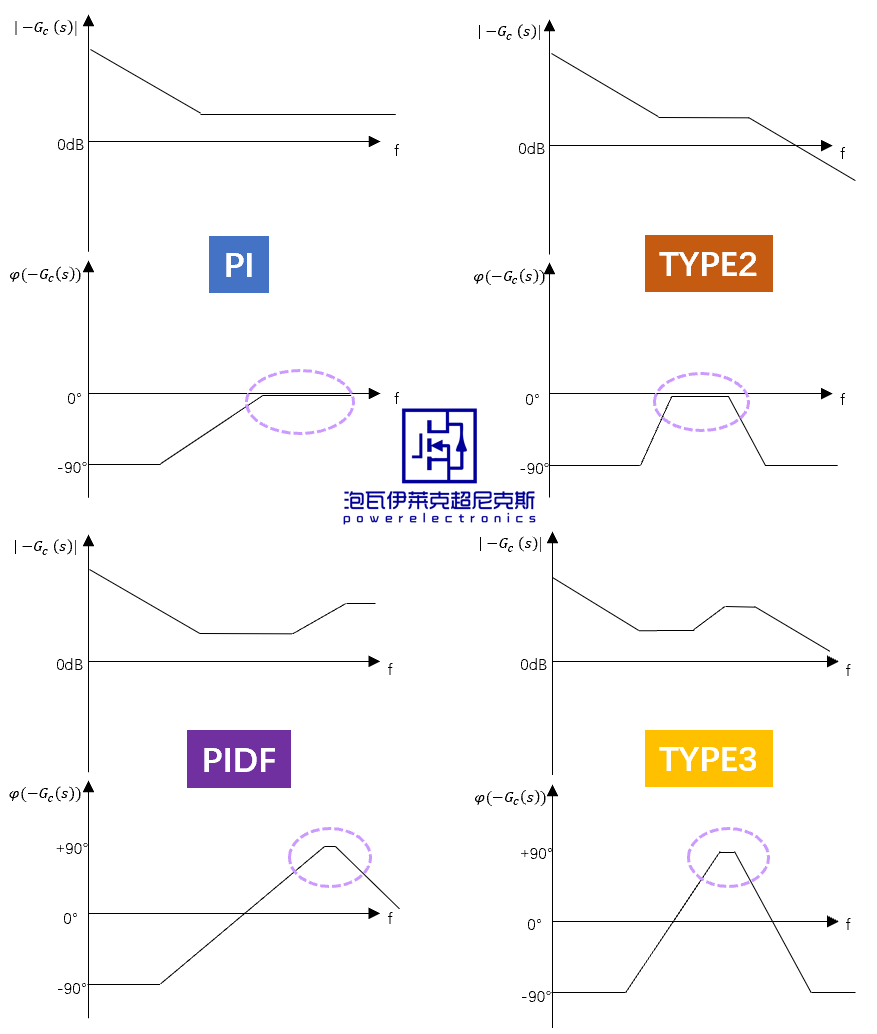
PI, TYPE 2, PIDF, TYPE 3的頻率特性
本文將繼續以電壓模式Buck的環路為例,從補償后的結果出發,深入對比上文提到的這四種補償。
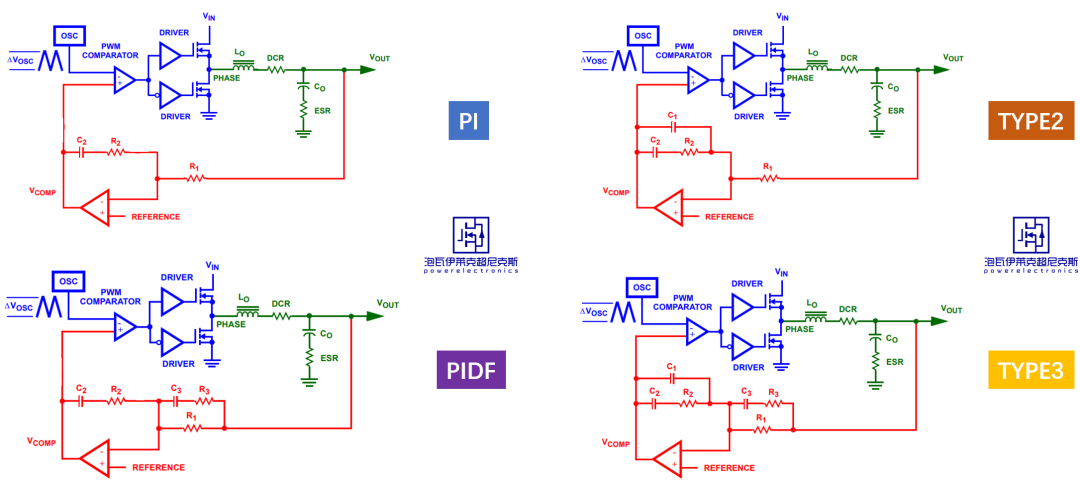
PI, TYPE 2, PIDF, TYPE 3補償的Buck電路
“公平”的對比
不同補償下,環路均設計到最優
當補償器的類型選定,級聯后的環路傳函的系統類型也被固定,調參使帶寬(穿越頻率fc)越高,動態響應的速度越快; 相位裕量(PM)越高,時域的穩定性越好。
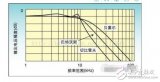
以電壓模式控制的Buck為研究對象,利用PSIM自帶的SmartCtrl ^?^ 模塊,觀察不同fc(定PM)和不同PM(定 fc )的環路特性。 下圖綠色是Buck開環控制-輸出的被控對象傳函,玫紅色是補償完的環路loop gain傳函,藍色是時域波形:負載電流小信號階躍下的輸出電壓調節波形。
不同fc(定PM)和不同PM(定fc)的環路特性
容易得到結論1:
最優的環路設計應使得帶寬(穿越頻率fc)最大的同時,相位也達到最大,以取得最大的相位裕量PM 。
繼續在SmartCtrl ^?^ 模塊中分別觀察TYPE 2和TYPE 3補償的環路,下圖橫軸是目標 fc ,縱軸是目標PM,任一坐標點代表一組(fc,PM)的設計目標,和對應補償網絡的參數。
淡黃色是高于fsw的區域,紅色是不穩定或無解的區域,白色是環路穩定的可行區域,其中的(fc,PM)組合都是可行解。 當最大fc都設定在約1/6**fsw*時,兩者的最優設計點分別在如下紅星位置,TYPE 3的最大PM明顯高于TYPE 2,這符合預期。
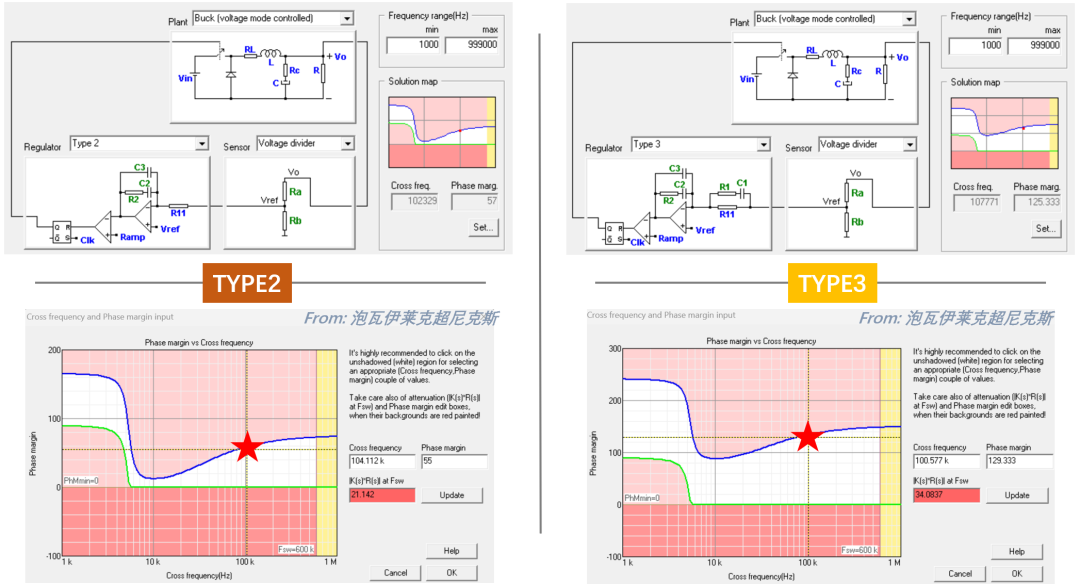
TYPE 2和TYPE 3補償的環路最優設計點
容易得到結論2:
不同類型的補償網絡,在設計成相同環路帶寬(穿越頻率 fc )的情況下,能達到的最大相位和相位裕量PM是不同的。
提過,fc的極限在理論上可逼近1/2* fsw ,但考慮到充足的相位裕量,及工程上仍用小信號平均建模指導設計的事實,我們仍將最大 fc設置在(1/6~1/5)*fsw附近。 只要fsw確定,最大fc也隨即確定,調節補償網絡參數使得fc*處的相位最大(即PM最大),則環路被設計到最優。 總之,針對相同的被控對象,比較不同類型的補償網絡時,要把每種補償下的環路都設計到最優,才可得到“公平”的比較結果。
被控對象的特點
基于一個電壓模式控制的Buck實例
研究過電壓模式控制的Buck,輸出電容的ESR相對較大時,能在環路中高頻段提供更多的相位提升。
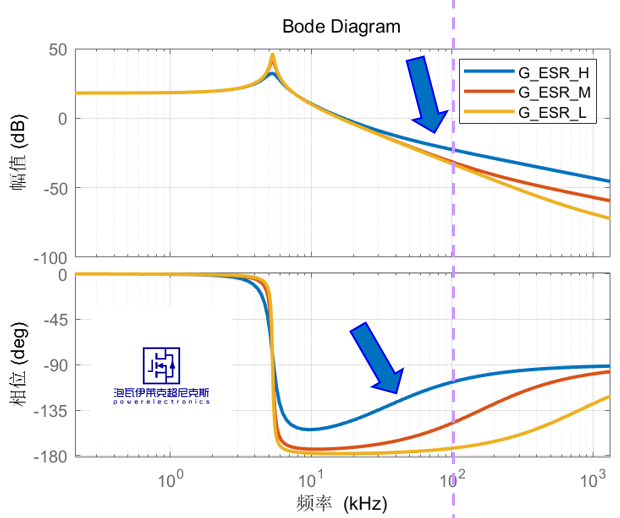
不同ESR的Buck開環被控對象,本例選ESR最大的藍色
為了讓沒有額外相位提升能力的PI和TYPE 2補償網絡,也能提供足夠的PM,使比較更有實際價值,本文采用上圖中電容ESR最高的藍色作為實例,參數如下表。 最大fc則設定在約1/6*fsw=100kHz,上圖紫色虛線處。
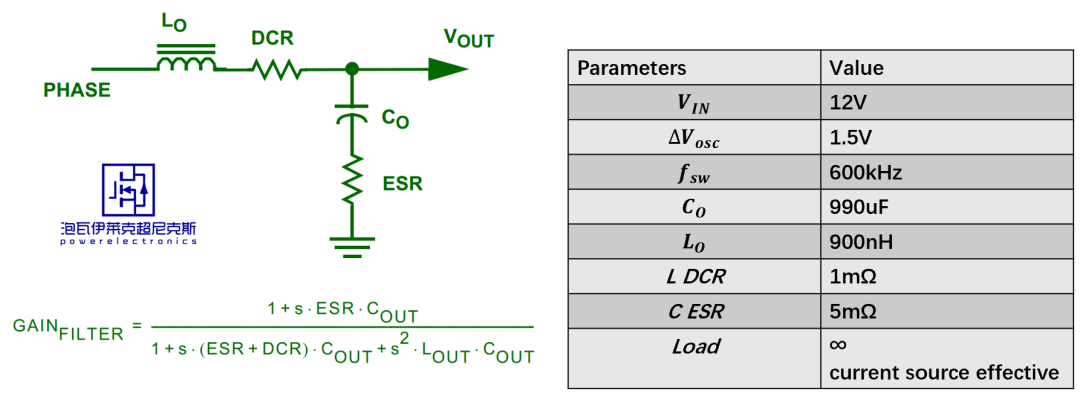
Buck開環被控對象的參數
PI, TYPE 2, PIDF, TYPE 3大比拼
基于一個電壓模式控制的Buck實例
將PI, TYPE 2, PIDF, TYPE 3四種補償網絡能提供最大相位的頻段,都設計在上圖被控對象的100kHz附近(紫色虛線處),同時在該點的增益相同(和被控對象級聯后為0dB),即認為它們都處于環路的最優設計點附近,這是公平比較的基礎。
在fc=100kHz處,PI和TYPE 2都提供了約0°的相位,而PIDF和TYPE 3都提供了約65°的相位。
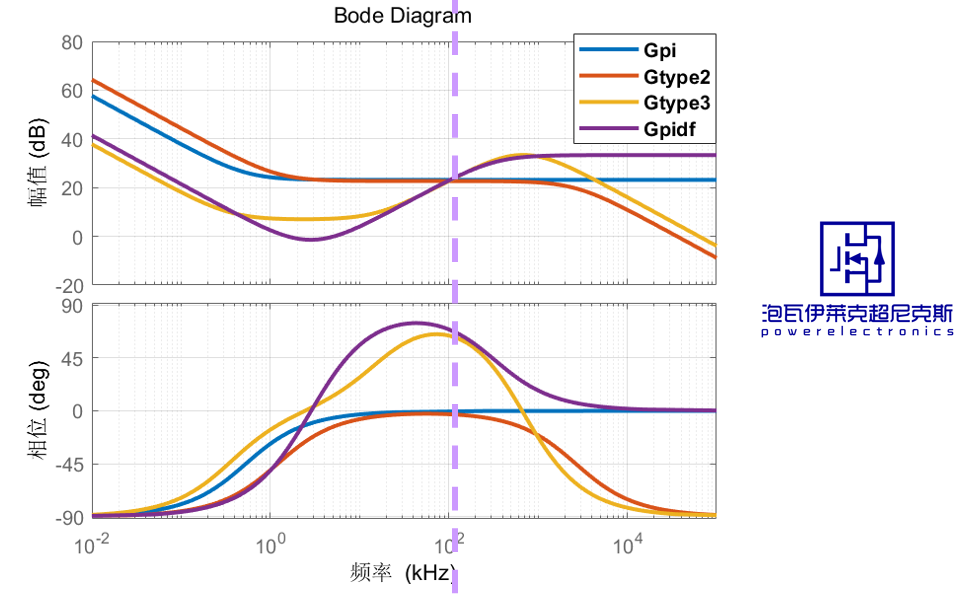
PI, TYPE 2, PIDF, TYPE 3在最優設計下的補償網絡頻率特性
如下是對應級聯后的環路loop gain結果,在 fc= 100kHz處,PI和TYPE 2的PM≈70°,PIDF和TYPE 3的PM≈140°。
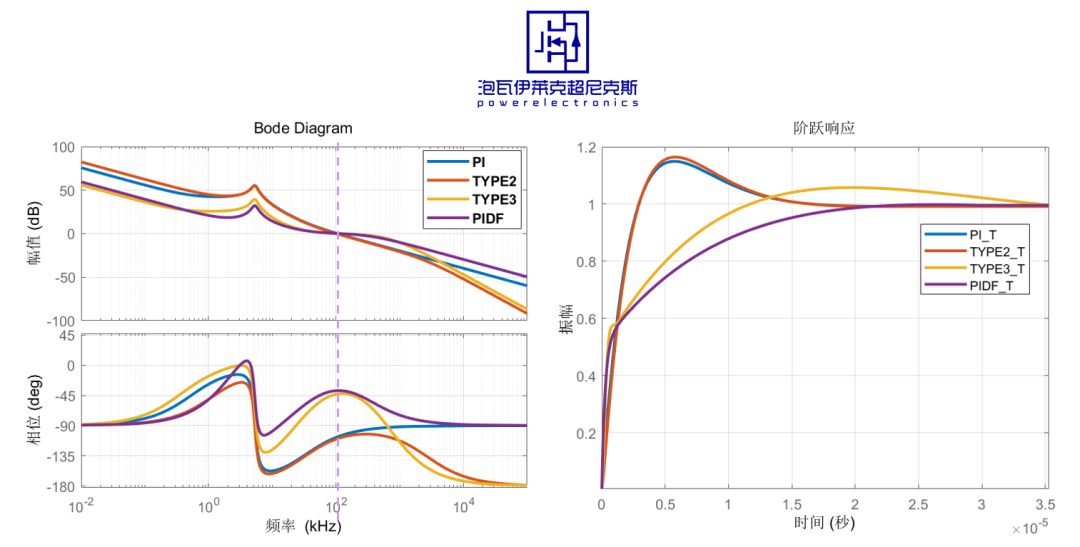
PI, TYPE 2, PIDF, TYPE 3在最優設計下的環路頻率特性,和閉環階躍響應
由環路頻率特性,配合閉環階躍響應的結果可知:
從時域穩定性(振蕩/過沖)的角度,PIDIF/TYPE 3優于PI/TYPE 2,因為它們的相位裕量PM更大
從穩態誤差的角度,PI/TYPE 2優于PIDF/TYPE 3,因為它們的低頻增益更高
從抑制高頻干擾的角度,TYPE 2/TYPE 3優于PI/PIDF,因為它們的高頻增益更低,增益裕量GM更大
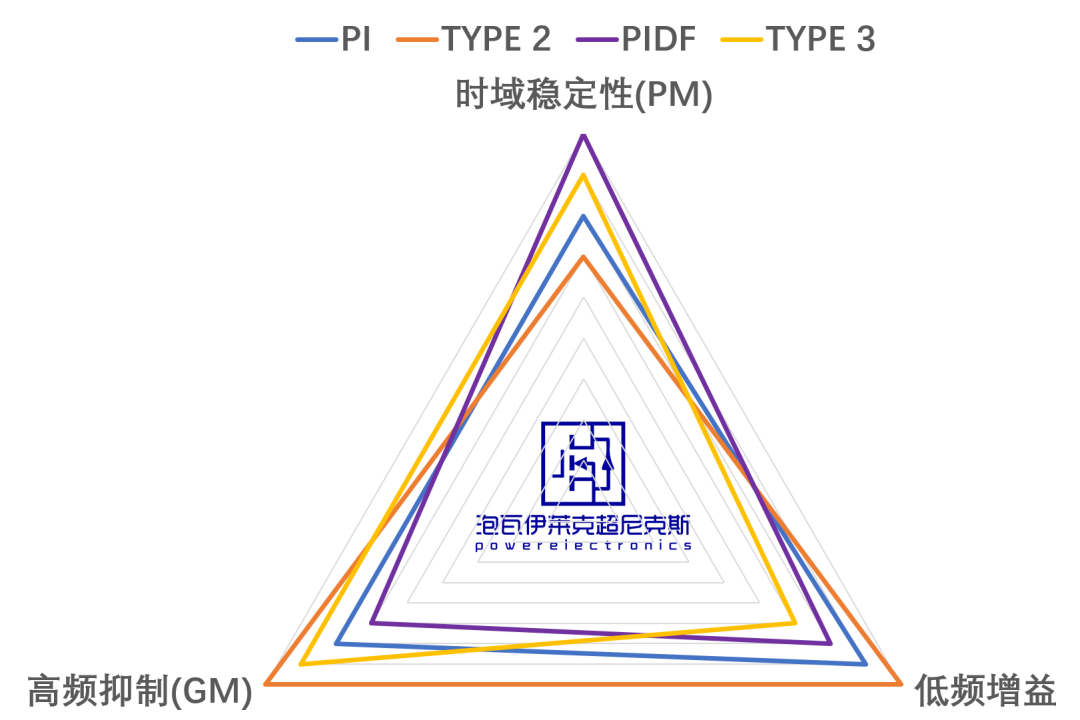
PI, TYPE 2, PIDF, TYPE 3的比較結果
-
網絡
+關注
關注
14文章
7761瀏覽量
90316 -
PID
+關注
關注
37文章
1479瀏覽量
87287 -
OTA
+關注
關注
7文章
604瀏覽量
36175 -
傳遞函數
+關注
關注
0文章
103瀏覽量
14211 -
環路補償
+關注
關注
2文章
95瀏覽量
6363
發布評論請先 登錄
FPGA設計的四種常用思想與技巧
FPGA設計的四種常用思想與技巧
電源設備中常用的四種變換電路(續)
常用FPGA/CPLD四種設計技巧
濾波器有幾種?四種濾波器之間對比詳解





 工商網監
工商網監
評論