") 用于ROS移動(dòng)機(jī)器人高集成電源解決方案(一)
用于ROS移動(dòng)機(jī)器人高集成電源解決方案(一)

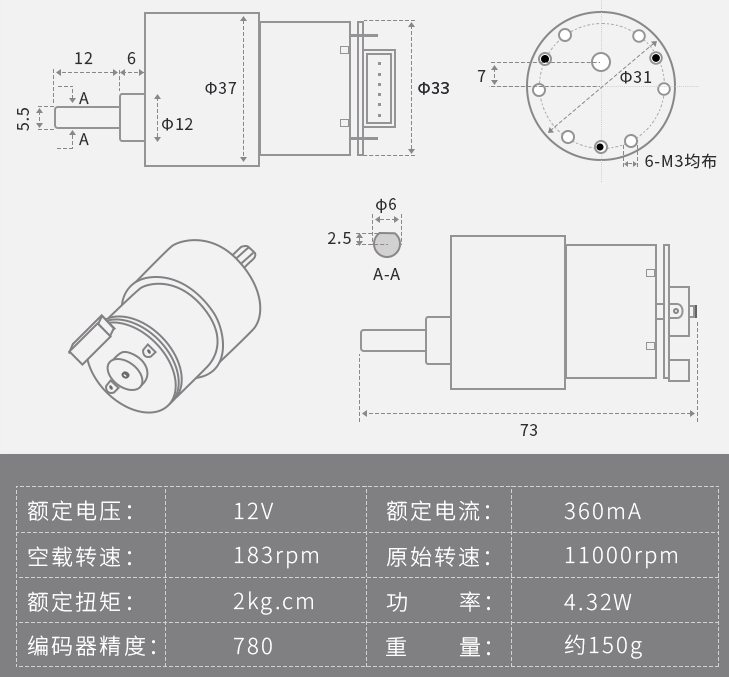
這篇文章一起來看看ROS移動(dòng)機(jī)器人供電系統(tǒng)。 目前某寶常見的ROS學(xué)習(xí)套件,大都采用12V有刷直流電機(jī),供電電壓常采用3節(jié)鋰電池串聯(lián)后得到12.6V電壓。 經(jīng)過電壓轉(zhuǎn)換后給電機(jī),控制器,樹莓派,雷達(dá)等傳感器供電。 電源的穩(wěn)定性對(duì)一個(gè)系統(tǒng)而言是至關(guān)重要的。 所以接下來的兩篇文章會(huì)給大家介紹用于ROS移動(dòng)機(jī)器人高集成電源解決方案。
這篇文章,主要進(jìn)行系統(tǒng)電源整體分析,以及對(duì)于很多人來說都比較頭疼的鋰電池選型問題。
電壓類型
一個(gè)硬件系統(tǒng)中往往會(huì)存在著多種電壓。 在ROS移動(dòng)機(jī)器人中有12.6V電壓,5V電壓,3.3V電壓。 對(duì)于這種多電壓類型并且存在高電壓差的系統(tǒng),在硬件設(shè)計(jì)中往往采用逐級(jí)降壓的方式。 在高壓差時(shí)為提高能量轉(zhuǎn)換效率多采用開關(guān)電源,如常用的非隔離式BUCK拓?fù)浣Y(jié)構(gòu),隔離式反激拓?fù)浣Y(jié)構(gòu)。 在低壓差時(shí),為得到低紋波純凈的電源,多采用線性降壓方式。
關(guān)于BUCK,線性電源的原理在第一個(gè)項(xiàng)目已經(jīng)進(jìn)行了介紹,可從我的歷史文章中查看。
鋰電池選型
鋰電池的選型要考慮多種因素,如電池體積,容量,放電倍率,循環(huán)充放電次數(shù),價(jià)格。 選型結(jié)果應(yīng)該是權(quán)衡了以上多種因素后得到的。
鋰電池放電倍率是一個(gè)重要的參數(shù):它用來表示電池充放電電流大小的比率,即倍率。 如1200mAh的電池,1C表示1200mA(1200mAh的1倍率),10C表示12000mA(1200mAH的10倍率)。
鋰電池放電倍率越大表明鋰電池能夠以越大的電流進(jìn)行放電,選擇合適的放電倍率對(duì)于ROS移動(dòng)機(jī)器人是很重要的。 鋰電池放電倍率不夠時(shí)當(dāng)電機(jī)啟動(dòng)瞬間或者電機(jī)轉(zhuǎn)向時(shí),在PID算法的控制下,想要達(dá)到系統(tǒng)瞬態(tài)響應(yīng)的需求,需要鋰電池提供很大的電流(電流值跟電機(jī)負(fù)載,PID參數(shù)都有關(guān)系),如果鋰電池不能提供這么大的電流,鋰電池電壓會(huì)被迅速拉低,控制部分電壓出現(xiàn)抖動(dòng),單片機(jī)復(fù)位重啟都有可能。
系統(tǒng)最大電流推算
系統(tǒng)中耗電大戶分別為:兩個(gè)直流電機(jī),樹莓派,雷達(dá),控制器。
樹莓派的供電電源需滿足2A的電流供給能力,雷達(dá)和控制器使用5V/2A便可以滿足需求。由于電機(jī)屬于感性負(fù)載,在電機(jī)啟動(dòng)瞬間,電機(jī)電流可達(dá)到額定電流的4-7倍。在設(shè)計(jì)中,假設(shè)電機(jī)啟動(dòng)瞬間,電流為額定電流的7倍。
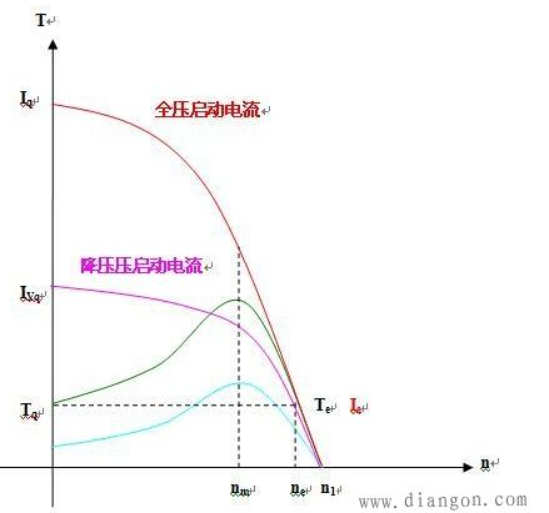
例如,一個(gè)額定電流為360ma的有刷直流電機(jī),啟動(dòng)瞬間電流可以達(dá)到2520ma,留出20%的設(shè)計(jì)余量,此時(shí)在啟動(dòng)瞬間,一個(gè)電機(jī)最大需要消耗3024ma的電流,兩個(gè)電機(jī)則需要電池提供6A以上的電流。結(jié)合樹莓派,雷達(dá),控制器的耗電量,可知電池最大需要提供10A以上的電流。
根據(jù)電池放電倍率可知,當(dāng)使用一個(gè)容量為2600mAh的三串鋰電池時(shí),鋰電池的放電倍率應(yīng)該大于3.8C才能夠滿足系統(tǒng)的供電需求。
鋰電池選型推薦
| 體積 | 選擇18650動(dòng)力電芯 |
|---|---|
| 容量 | 2600mAh |
| 放電倍率 | >4C |
| 價(jià)格 | 12元/節(jié) |
-
鋰電池
+關(guān)注
關(guān)注
260文章
8413瀏覽量
176166 -
BUCK
+關(guān)注
關(guān)注
32文章
487瀏覽量
66147 -
移動(dòng)機(jī)器人
+關(guān)注
關(guān)注
2文章
789瀏覽量
34142 -
線性電源
+關(guān)注
關(guān)注
5文章
205瀏覽量
24931 -
ROS
+關(guān)注
關(guān)注
1文章
288瀏覽量
17740
發(fā)布評(píng)論請(qǐng)先 登錄
資料:移動(dòng)機(jī)器人能否自動(dòng)充電?
Labview My RIO 移動(dòng)機(jī)器人
機(jī)器人、協(xié)作機(jī)器人和移動(dòng)機(jī)器人,你分的清楚嗎
如何實(shí)現(xiàn)移動(dòng)機(jī)器人的設(shè)計(jì)?
請(qǐng)問怎么設(shè)計(jì)一種室外移動(dòng)機(jī)器人組合導(dǎo)航定位系統(tǒng)?
什么是移動(dòng)機(jī)器人軟硬件系統(tǒng)問題
最實(shí)用的STM32和ROS機(jī)器人的串口通信方案
差速移動(dòng)機(jī)器人軌跡跟蹤控制方法
移動(dòng)機(jī)器人的三種主要運(yùn)動(dòng)系統(tǒng)
如何利用掃地機(jī)輪子制作ROS移動(dòng)機(jī)器人地盤
基于Matlab和VR技術(shù)的移動(dòng)機(jī)器人建模及仿真
制作ROS移動(dòng)機(jī)器人地盤

用于ROS移動(dòng)機(jī)器人高集成電源解決方案(二)
DRC3000:商用移動(dòng)機(jī)器人整體解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論