 ROS移動機器人中常用的編碼器
ROS移動機器人中常用的編碼器
前兩篇文章介紹了電機基礎知識和直流有刷電機驅動電路。這篇文章介紹ROS移動機器人中電機測速傳感器----編碼器。ROS移動機器人中常用到的編碼器有兩種分別為光電編碼器(光學式檢測)和霍爾編碼器(磁場原理檢測)。
光電編碼器
光電編碼器是一種通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖信號的傳感器。 光電編碼器由光電碼盤和光電檢測裝置組成,由下圖所示:
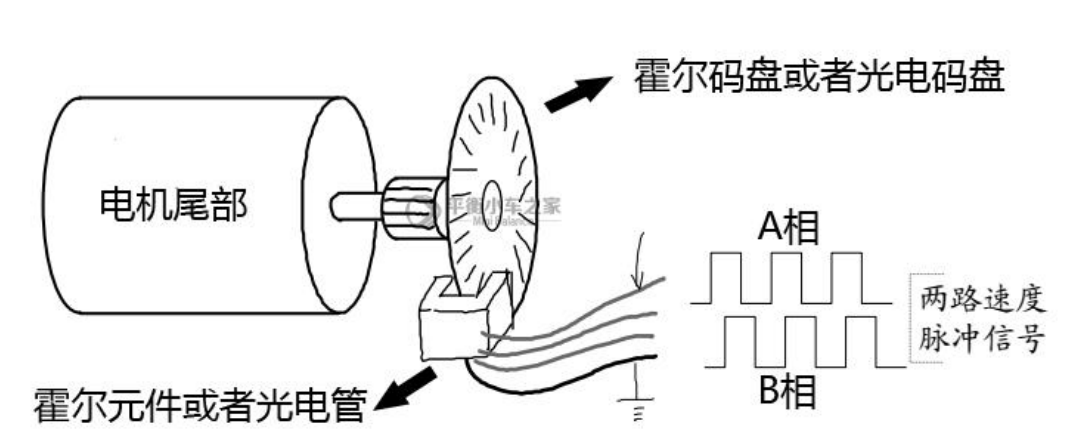
光電碼盤與電機轉子同軸,電機旋轉時帶動光電碼盤與電機同軸旋轉,此時在光電碼盤作用下會使得光電接收管接收到的光信號出現斷斷續續的情況。 比如接收到光信號編碼器輸出高電平,不能接收到光信號編碼器輸出低電平,這樣編碼器就能夠輸出如上圖所示的脈沖信號,通過單片機輸入捕獲或專用編碼器接口就能夠檢測出電機轉速。
在ROS系統中,程序需要知道電機是正傳還是反轉,為了實現這個功能。 在輸出脈沖上采用了兩相(A相,B相)相隔90度的脈沖信號。 這樣在電機旋轉時,通過判斷A相與B相的先后關系便能夠確定的正反轉。
在實際應用中我們只需要使用STM32的正交編碼器接口,便可以輕松愉快地得到電機轉速與方向。
霍爾編碼器
與光電編碼器相似,霍爾編碼器通過霍爾傳感器檢測磁場的變化來輸出脈沖信號,如下圖所示為用于檢測磁極變化的傳感器,當正對著的磁極發生變化時(比如N級切換到S級),霍爾傳感器的輸出腳便會出現高低電平的切換(比如低電平切換到高電平)。
霍爾編碼器只有霍爾傳感器是不能工作的,還需要用到觸發霍爾傳感器輸出信號改變的磁環。
顧名思義,圖中的磁環中內嵌了很多磁極,磁極成交錯排列(N-S-N-S... ),這樣只需要將兩個霍爾傳感器按照90度電角度安裝固定后,讓霍爾磁環隨著電機轉子一同旋轉,就能夠輸出與光電編碼器相似的正交脈沖信號。
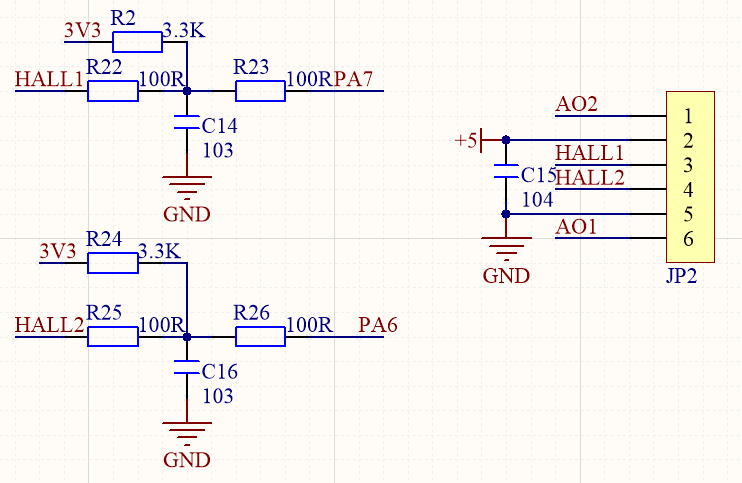
編碼器接口電路
編碼器接口電路,比較簡單。 在霍爾信號輸入口出增加濾波電路,濾除傳輸線上的信號干擾,然后送往單片機進行電機速度計算。
-
接口電路
+關注
關注
8文章
469瀏覽量
57501 -
編碼器
+關注
關注
45文章
3768瀏覽量
137032 -
驅動電路
+關注
關注
155文章
1576瀏覽量
109545 -
移動機器人
+關注
關注
2文章
784瀏覽量
33982 -
ROS
+關注
關注
1文章
284瀏覽量
17539
發布評論請先 登錄
Labview My RIO 移動機器人
機器人、協作機器人和移動機器人,你分的清楚嗎
旋轉編碼器怎么節約移動機器人功耗?
家庭移動機器人避障常用傳感器及相關技術
如何實現移動機器人的設計?
什么是移動機器人軟硬件系統問題
最實用的STM32和ROS機器人的串口通信方案
差速移動機器人軌跡跟蹤控制方法
如何利用掃地機輪子制作ROS移動機器人地盤
電機在ROS移動機器人系統中的作用
制作ROS移動機器人地盤

ROS移動機器人中常用的兩種電機
ROS移動機器人的通信接口電路設計





 工商網監
工商網監
評論