 如何列寫控制系統微分方程
如何列寫控制系統微分方程

如何列寫控制系統微分方程:
列寫控制系統微分方程注意事項:1,由系統原理圖畫出系統方塊圖,并列寫系統各元件的微分方程。2,信號傳遞單向性,前一個元件輸出是后一個元件的輸入;3,后級元件不對前級元件產生負載效應。4,消去中間變量得到描述系統輸出量與輸入量之間關系的微分方程;
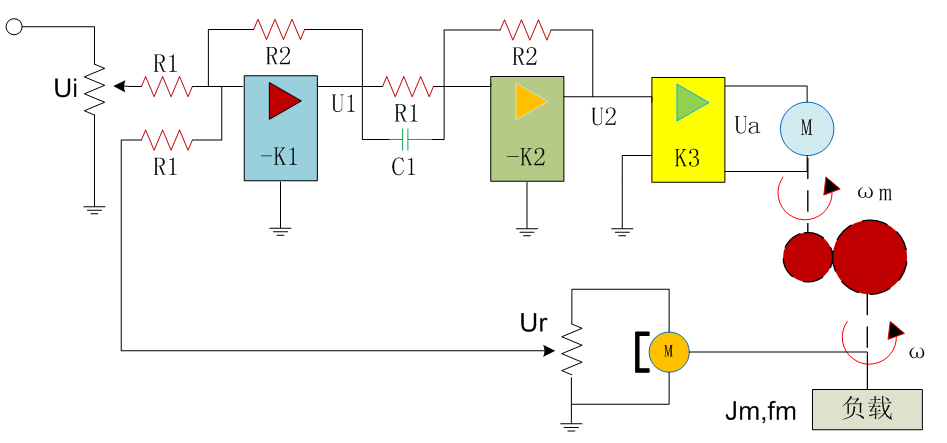
控制系統被控對象是電動機通過齒輪帶動負載,系統輸出量是轉速ω,參據量是Ui,控制系統由給定電位器、運算放大器1、運算放大器2、功率放大器3、齒輪減速器、測速發電機等部分組成。首先分別列寫各元器件微分方程:
運算放大器1:參據量Ui與速度反饋電壓Ut經過放大后產生偏差放大信號輸出。

運算放大器2:帶有RC網絡的放大電路,U2與U1之間的微分方程為:

式中,K2=R2/R1是運算放大器2的比例系數,τ=R1C是微分時間常數。因此,這是一個比例微分控制元件;
運算放大器3:功率放大器,輸入輸出方程為:

直流電動機:
首先把已知的齒輪系等效轉動慣量、粘性摩擦系數和等效負載轉矩帶入齒輪系動態微分方程:

列寫輸出轉矩等效微分方程:

然后結合直流電機電壓方程、電磁轉矩方程列寫直流電機微分方程為:

齒輪系:設齒輪系的輸入與輸出角速度比為i,則電動機轉速ωm經齒輪系減速后變為ω:

測速發電機:測速發電機輸出電壓Ut與其轉速ω成正比:

消去方程中間變量Ut、U1、U2、Ua,ωm,整理后獲得控制系統微分方程:

該式用于研究給定電壓Ui和擾動轉矩Mc作用于系統時,速度控制系統的動態性能。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制系統
+關注
關注
41文章
6780瀏覽量
112149 -
功率放大器
+關注
關注
102文章
3977瀏覽量
134774 -
運算放大器
+關注
關注
217文章
5712瀏覽量
176592 -
信號
+關注
關注
11文章
2852瀏覽量
78261 -
微分方程
+關注
關注
0文章
21瀏覽量
9674
發布評論請先 登錄
相關推薦
熱點推薦
Matlab偏微分方程工具箱應用說明
poimesh 在矩形區域上產生規則的網絡refinemesh 細化三角形網絡wbound 寫一個邊界描述文件wgeom 寫一個幾何描述文件pdecont 畫輪廓圖pdemesh 畫偏微分方程的三角形
發表于 09-22 15:26
Matlab求解微分方程(ODEs/PDEs)
本帖最后由 A670521546 于 2011-7-8 10:29 編輯
常微分方程(ODEs)的MATLAB數值解法》偏微分方程(PDEs)的MATLAB數值解法》Z變換和差分方程
發表于 07-08 08:42
使用傳遞函數代替常系數微分方程
的分母為系統的特征多項式;極點:特征多項式等于0組成特征方程的根;階數:特征多項式的最高階數n;根軌跡增益:;拉普拉斯變換:可采用傳遞函數代替常系數微分方程來描述系統的特性。這就為采用
發表于 05-21 08:43
用微分方程來描述自動控制系統各變量的動態關系
要進一步研究一個自動控制系統, 就需要建立系統的數學模型來描述一個系統。 所謂數學模型, 就是描述系統輸入、 輸出變量以及內部各變量之間關系的數學表達式。 常用
發表于 09-15 07:20
常微分方程的MAtLAB解法
摘要:對一些不能求解解析解的常微分方程和偏微分方程進行精確求解是非常困難的,探討了用MATLAB方法對此類方程進行求解,結合實例介紹了MATLAB數值計算的方法,先將物體的運
發表于 01-08 21:24
?61次下載

一類高階非線性微分方程的解法
對于高階線性微分方程,各教材均有系統的求解方法 .而對于一般高階非線性微分程,由于沒有系統的解法,故有關微分方程的專門教材也未給與更多的介紹
發表于 03-03 22:12
?24次下載
Matlab的微分、積分和微分方程
微分、積分和微分方程4.1. 知識要點和背景:微積分學基本定理 4.2 實驗與觀察(Ⅰ):數值微積分4.2.1實驗:積分定義、微分
發表于 10-17 00:32
?4719次閱讀






 工商網監
工商網監
評論