") 通過多個扭矩限制設置改善抓取操作
通過多個扭矩限制設置改善抓取操作
機器人夾持器通常用于夾持零件以進行運輸。夾持器背后的驅動力可以是氣動的、液壓的或電動的。哪種類型最適合抓握?
答案取決于應用要求和負載的大小。雖然液壓的高功率和氣動的成本效益可能對某些人有吸引力,但應考慮電動機的一致性、效率、易于維護和內置驅動器功能。
在這篇文章中,我們將解釋扭矩限制功能如何使無刷電機成為一種非常可行的夾具解決方案。
挑戰(zhàn): 逐漸增加夾持力以牢固地夾持負載
 |
傳統(tǒng)夾持器 夾具上裝有氣動裝置,可夾住負載并將其輸送到下一道工序。 氣動夾具的問題 在搬運一定質量的重物時,由于夾持力不一致,夾持器可能會掉落負載。 |
解決方案: 使用扭矩限制功能逐漸增加夾持力
扭矩限制功能可用于按電機額定扭矩的百分比遞增地降低或增加電機扭矩。它可用于 Oriental Motor 的許多閉環(huán)電機系統(tǒng)。
 |
實際應用示例 扭矩限制功能提供優(yōu)化的多級夾持力,逐漸增加夾持器的夾持力,并在不損壞負載的情況下安全地夾持負載。 怎么運行的 電機的扭矩可以通過流過其繞組的電流量來增加或減少。扭矩限制功能監(jiān)測和控制電機電流以限制扭矩。 |
|
如何使用 在運行之前,使用驅動器的前面板或 MEXE02 支持軟件以數(shù)字方式設置所需扭矩限制設置的數(shù)據(jù)。 啟動電機并用低扭矩限制設置輕輕抓住負載。當電機超過設定的扭矩限制時,TLC 輸出將打開。 一旦 TLC 輸出打開,切換到高扭矩限制設置。 如果 TLC 輸出保持 ON,則表示負載已牢固夾持,因此可以開始運輸過程。 |
時序圖 - 扭矩限制功能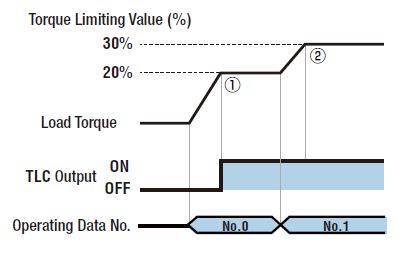 |
|
具有 16 種不同的速度和扭矩限制設置,相同的 BLE2 系列無刷電機和驅動器可以針對各種負載進行配置。* *對于閉環(huán)步進電機系統(tǒng),最多可提供 256 種設置。 |
  |
| 輸出功率 | 30 瓦、60 瓦、120 瓦、200 瓦、400 瓦 |
| 轉矩限制設定范圍*1 | 0~300% |
| 最大設置數(shù) | 16 |
| 扭矩限制精度*2 | ±10% |
| 速度控制范圍*3 | 80~4000轉/分 |
*1:額定轉矩值為100%時的值。
*2: 最大錯誤。由于設置速度、電源電壓和電機電纜延長長度,設置值和產(chǎn)生的扭矩之間可能會出現(xiàn)大約 ±10%(在額定扭矩和額定速度下)
。
*3:也可提供速度控制范圍為2~4000r/min的BXⅡ系列。
審核編輯黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
扭矩
+關注
關注
1文章
64瀏覽量
12864 -
無刷電機
+關注
關注
60文章
874瀏覽量
47033 -
夾持器
+關注
關注
0文章
23瀏覽量
4804
發(fā)布評論請先 登錄
相關推薦
熱點推薦
Allegro Skill布局功能之遠程抓取器件介紹
過使用“遠程抓取器件”功能,用戶可以批量選取多個器件,隨后通過鼠標左鍵逐個點擊放置,實現(xiàn)高效精準的器件布局。該功能特別適用于在大規(guī)模芯片周邊配置去耦電容、電阻等元件,能夠快速將元件定位到目標焊盤附近或芯片背面。

主驅電機系統(tǒng)的扭矩估算方案
主驅電機是電動汽車核心的部件之一,主要作用是產(chǎn)生驅動扭矩或制動扭矩,驅動車輛前進并進行動能回收。扭矩估算算法也成為主驅電機扭矩安全的重點。目前常用的

操作指南:pytorch云服務器怎么設置?
設置PyTorch云服務器需選擇云平臺,創(chuàng)建合適的GPU實例,安裝操作系統(tǒng)、Python及Anaconda,創(chuàng)建虛擬環(huán)境,根據(jù)CUDA版本安裝PyTorch,配置環(huán)境變量,最后驗證安裝。過程中需考慮
hyper v 內存,hyper v 內存設置的操作步驟和方法是什么?
在利用Hyper-V搭建和管理虛擬機的過程中,合理設置虛擬機的內存至關重要。內存分配是否恰當,會直接影響到虛擬機的運行性能和穩(wěn)定性。若內存分配過少,虛擬機可能運行緩慢甚至頻繁卡頓;而分配過多,則會
深度解析!RK3568 加持機械臂是如何實現(xiàn)顏色識別與抓取的?
一、產(chǎn)品簡介TL3568-PlusTEB人工智能實驗箱國產(chǎn)高性能處理器64位4核低功耗2.0GHz超高主頻1T超高算力NPU兼容鴻蒙等國產(chǎn)操作系統(tǒng)二、實驗目的1、了解機械臂識別顏色抓取積木的基本流程

減速電機扭矩的含義
減速電機扭矩是指減速電機輸出端所產(chǎn)生的力矩大小,它是衡量減速電機性能的重要參數(shù)之一。扭矩的單位通常用牛頓米(N·m)表示。減速電機扭矩的大小直接影響到減速電機的傳動效率和使用效果,因此在選擇減速電機時,需要根據(jù)實際需要來選擇合適

國產(chǎn)芯RK3568教學實驗箱操作案例:顏色識別抓取積木
相應的位置中。機械臂通過攝像頭檢測算法識別不同顏色,物品擺放位置固定;對每個舵機編寫固定夾取路徑,不同顏色轉動角度不同。
實現(xiàn)原理
代碼重點劃分為三部分:顏色識別,機械臂抓取,機械臂復位。
(1)返回
發(fā)表于 12-05 14:30
Python庫解析:通過庫實現(xiàn)代理請求與數(shù)據(jù)抓取
在Python中,有多個庫可以幫助你實現(xiàn)代理請求和數(shù)據(jù)抓取。這些庫提供了豐富的功能和靈活的API,使得你可以輕松地發(fā)送HTTP請求、處理響應、解析HTML/XML/JSON數(shù)據(jù),以及進行復雜的網(wǎng)絡操作。
電機的轉速和扭矩的關系
之前看過一個視頻是有關電動汽車的電機運行特性,低速時電機難以輸出大扭矩,是電機高速旋轉帶動輪胎通過輪胎與地面的接觸摩檫力帶動汽車前進;
但是由轉速和扭矩關系式P=Tw,扭矩和轉速成反比
發(fā)表于 09-07 16:08
設置靜止無功補償器限制電壓波動的原因
設置靜止無功補償器(SVC)來限制電壓波動的原因主要包括以下幾點: 一、穩(wěn)定電力系統(tǒng) : 1、動態(tài)響應 :SVC能夠快速響應負荷變化,調節(jié)無功功率輸出,維持電壓在預設范圍內,防止電壓崩潰。 2、阻尼






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論