") 加州圣地亞哥空間探測(cè)機(jī)器人簡(jiǎn)介
加州圣地亞哥空間探測(cè)機(jī)器人簡(jiǎn)介
這篇文章來(lái)源于DevicePlus.com英語(yǔ)網(wǎng)站的翻譯稿。
今天,我們介紹一款由加利福尼亞大學(xué)圣地亞哥分校(UCSD)的聰慧工程師研制的空間探測(cè)機(jī)器人模型。該團(tuán)隊(duì)目前正在研發(fā)的主探測(cè)車旨在實(shí)現(xiàn)自主式全地形勘探。
Device Plus已經(jīng)與100多所美國(guó)頂尖大學(xué)展開(kāi)合作,希望通過(guò)資助一些缺乏資金或資源的項(xiàng)目來(lái)促進(jìn)學(xué)生創(chuàng)新。目前,Device Plus正在提供硬件贊助計(jì)劃,并希望與活躍的學(xué)生工程組織合作,以構(gòu)建我們的“連接”部分。請(qǐng)通過(guò)以下電子郵件聯(lián)系我們,獲取有關(guān)這個(gè)機(jī)會(huì)的更多信息:[email protected]!
介紹:Yonder Dynamics
Yonder Dynamics 是加州大學(xué)圣地亞哥分校的本科生機(jī)器人組織。我們成立于2016年夏天,主要專注自主式機(jī)器人領(lǐng)域的各種項(xiàng)目。我們認(rèn)為,自主式機(jī)器人才是運(yùn)輸、農(nóng)業(yè)、醫(yī)藥以及太空探索等一切領(lǐng)域的未來(lái)。
我們的主要目標(biāo)是參加2017年6月舉行的大學(xué)探測(cè)車挑戰(zhàn)賽——面向本科生的最大的國(guó)際探測(cè)車大賽。我們計(jì)劃成為比賽歷史上第一支實(shí)現(xiàn)完全自主式探測(cè)車(無(wú)需人力控制)的隊(duì)伍。我們認(rèn)為這場(chǎng)比賽將是展示我們的技術(shù)并與該領(lǐng)域的其他人會(huì)面的絕佳機(jī)會(huì)。我們的靈感之一來(lái)自波士頓動(dòng)力公司(Boston Dynamics)生產(chǎn)的全地形機(jī)器人。
目前,我們的團(tuán)隊(duì)正在打造一款完全自主式的全地形勘探車。該空間探測(cè)車Testcar的平臺(tái)低成本,我們可以在上面開(kāi)發(fā)軟件和控制系統(tǒng),并將主車身建造在上面。到目前為止,我們已經(jīng)實(shí)現(xiàn)了計(jì)算機(jī)控制駕駛和自動(dòng)測(cè)距,并將繼續(xù)集成各種ROHM傳感器,結(jié)合我們的XBee收發(fā)器來(lái)測(cè)試通信設(shè)備和協(xié)議。這些都將會(huì)在隨后的大學(xué)探測(cè)車挑戰(zhàn)賽上展示。我們希望測(cè)試XBee收發(fā)器的最大性能,同時(shí)從ROHM傳感器獲取實(shí)時(shí)數(shù)據(jù)。Testcar只是利用傳感器收集數(shù)據(jù)進(jìn)行測(cè)試,但是參賽的探測(cè)車會(huì)利用這些傳感器協(xié)助實(shí)現(xiàn)自主導(dǎo)航系統(tǒng)。
ROHM傳感器評(píng)估套件
ROHM 傳感器評(píng)估套件是一款兼容 Arduino 的開(kāi)發(fā)套件,可以允許用戶在項(xiàng)目中快速添加各種傳感器。簡(jiǎn)潔的布局和緊湊的設(shè)計(jì)使其成為初學(xué)者和高級(jí) Arduino 發(fā)燒友的完美原型制作工具。
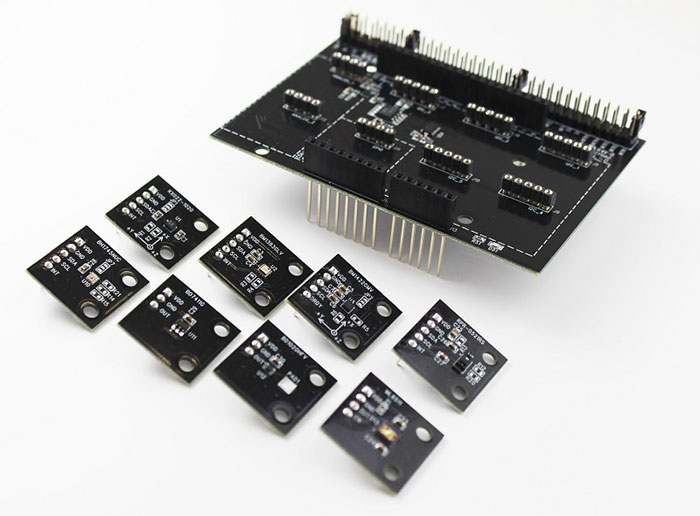
圖1.帶有8種不同兼容傳感器的ROHM Sensor Shield開(kāi)發(fā)板(右上)/@CoreStaff
有關(guān)如何設(shè)置Sensor Shield開(kāi)發(fā)板以及如何連接Arduino的指南,請(qǐng)參閱上一篇文章Arduino傳感器 – ROHM傳感器評(píng)估套件概覽
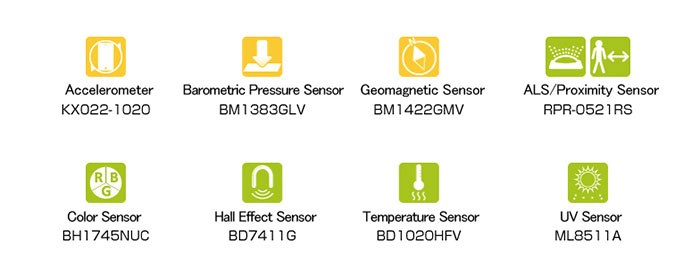
該傳感器評(píng)估套件搭載Sensor Shield開(kāi)發(fā)板以及8種不同的ROHM傳感器:加速度計(jì)、氣壓傳感器、地磁傳感器、照度/接近傳感器、色彩傳感器、霍爾傳感器、溫度傳感器和紫外線傳感器。
有關(guān)Sensor Shield開(kāi)發(fā)板和每種傳感器的詳細(xì)資料以及各個(gè)傳感器的Arduino庫(kù)下載鏈接請(qǐng)?jiān)L問(wèn)以下網(wǎng)站: https://www.rohm.com.cn/sensor-shield-support/shield, 套件的說(shuō)明書(shū)描述了如何使用Sensor Shield開(kāi)發(fā)板和各個(gè)傳感器。該說(shuō)明書(shū)隨產(chǎn)品附送,也可以在該網(wǎng)站上下載。
ROHM傳感器評(píng)估套件的快速概覽
Testcar 將使用 ROHM 的三個(gè)傳感器——加速度計(jì)、接近傳感器模塊和溫度傳感器。在隨后的更新中,我們將展示如何使用這些傳感器來(lái)幫助探測(cè)車進(jìn)行導(dǎo)航。我們會(huì)將它們安裝到 Testcar 上,然后并檢查是否能夠準(zhǔn)確接收數(shù)據(jù)。
硬件:
ROHM Sensor Shield開(kāi)發(fā)板
ROHM 加速度計(jì)(KX022-1020)
ROHM照度/接近傳感器模塊(RPR-0521RS)
ROHM溫度傳感器(BD1020HFV)
Venus GPS
HC-SR04 溫度傳感器
HC-05 藍(lán)牙模塊
XBee 收發(fā)器
Arduino Uno
面包板和線纜
計(jì)算機(jī)
RC 車(任何車輛都可以)
軟件:
Arduino IDE
工具:
紙板
管膠帶
基本設(shè)置:
1. 將傳感器安裝到所提供的電路板上 。
ROHM 傳感器套件含有一塊可以連接所有傳感器的電路板。該工作可以根據(jù)附帶的說(shuō)明書(shū)輕松完成。然后將電路板連至Arduino的匹配端口,以進(jìn)行訪問(wèn)和控制;同時(shí)連接用于導(dǎo)航的基本 Venus GPS 器件以及用于控制汽車的Xbee收發(fā)器(如下所示)。
2. 利用ROHM產(chǎn)品驅(qū)動(dòng)庫(kù)進(jìn)行傳感器測(cè)試。
ROHM 為其傳感器產(chǎn)品提供了附帶的驅(qū)動(dòng)庫(kù),這使得我們能夠輕松設(shè)置并運(yùn)行加速度計(jì)、照度傳感器和溫度傳感器。產(chǎn)品驅(qū)動(dòng)庫(kù)地址如下:https://www.rohm.com.cn/sensor-shield-support/shield
3. 利用示例 XBee 代碼進(jìn)行 XBee 測(cè)試 – XBee可以在標(biāo)準(zhǔn)面包板上搭建。
XBees 是一款基本的低成本收發(fā)器(就像 ROHM 產(chǎn)品一樣),并附帶示例代碼,便于使用。在標(biāo)準(zhǔn)面包板上搭建收發(fā)器并插入 Arduino 之后,我們可以安裝軟件包,準(zhǔn)備就緒。
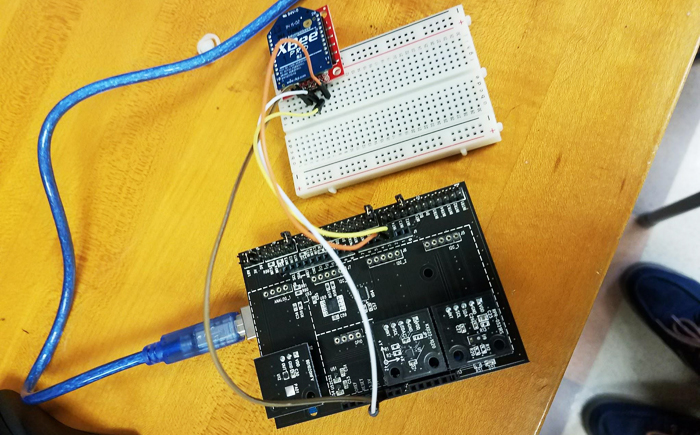
圖 2. 面板上搭建的 XBee ,已連接 Arduino
4. 修改 XBee 代碼以集成 ROHM 傳感器庫(kù) 。
這非常簡(jiǎn)單——XBee 標(biāo)準(zhǔn)代碼已經(jīng)內(nèi)置了汽車控制等類似任務(wù)的信號(hào)。我們只是添加了與ROHM代碼庫(kù)的連接程序,以便可以進(jìn)行遠(yuǎn)程通話。
5.連至RC小車。
這取決于您的車。我們用紙板和膠帶制作了一個(gè)平臺(tái)。
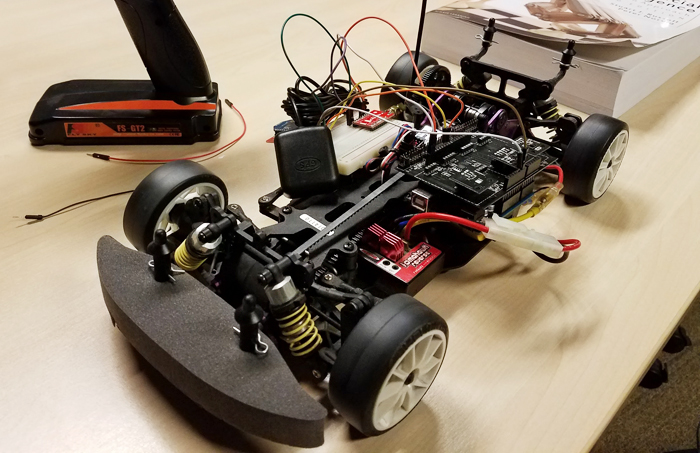
圖 3. RC 車上的 ROHM 傳感器套件
6. 獲取RC車輛的實(shí)時(shí)數(shù)據(jù) !
我們還添加了更多組件,比如 HC-SR04 超聲波傳感器和HC-05藍(lán)牙模塊。我們的項(xiàng)目在不斷演進(jìn),而且團(tuán)隊(duì)也一直在努力改進(jìn)探測(cè)車的附加特性和功能。
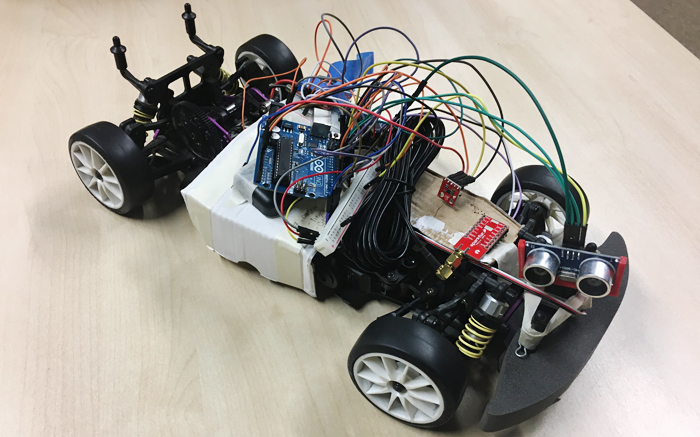
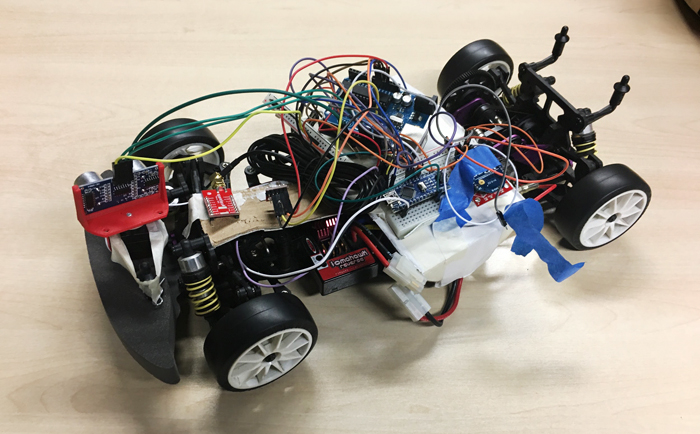
圖 4. 組裝完成的 Testcar
未來(lái)工作
ROHM 傳感器都非常棒,我們很高興將其納入我們的探測(cè)車原型。目前這個(gè)平臺(tái)上的測(cè)試一切順利,所以我們的下一步將會(huì)增加 Testcar 的功能,以便讓探測(cè)車可以自主穿過(guò)一個(gè)迷宮。這需要添加一個(gè)測(cè)距儀,并將傳感器數(shù)據(jù)連至神經(jīng)網(wǎng)絡(luò),以讓小車變得完全自主。
敬請(qǐng)關(guān)注!

DevicePlus 編輯團(tuán)隊(duì)
設(shè)備升級(jí)版適用于所有熱愛(ài)電子和機(jī)電一體化的人。
審核編輯黃宇
-
傳感器
+關(guān)注
關(guān)注
2562文章
52450瀏覽量
763133 -
探測(cè)
+關(guān)注
關(guān)注
0文章
214瀏覽量
20566 -
機(jī)器人
+關(guān)注
關(guān)注
212文章
29421瀏覽量
211335 -
電路板
+關(guān)注
關(guān)注
140文章
5078瀏覽量
101307
發(fā)布評(píng)論請(qǐng)先 登錄
盤(pán)點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門的引路書(shū)
海康機(jī)器人布局關(guān)節(jié)機(jī)器人業(yè)務(wù)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
《具身智能機(jī)器人系統(tǒng)》第10-13章閱讀心得之具身智能機(jī)器人計(jì)算挑戰(zhàn)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
《具身智能機(jī)器人系統(tǒng)》第1-6章閱讀心得之具身智能機(jī)器人系統(tǒng)背景知識(shí)與基礎(chǔ)模塊
鴻蒙機(jī)器人與鴻蒙開(kāi)發(fā)板聯(lián)動(dòng)演示
自動(dòng)真空機(jī)器人的超聲波地面和懸崖探測(cè)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論