") 智能機(jī)器人手臂 – 第1部分:機(jī)械結(jié)構(gòu)和接線
智能機(jī)器人手臂 – 第1部分:機(jī)械結(jié)構(gòu)和接線

這篇文章來源于DevicePlus.com英語網(wǎng)站的翻譯稿。
您有沒有想過擁有一款可以幫您滿足日常需求的設(shè)備?而且該設(shè)備能夠區(qū)分您(主人)和其他非授權(quán)用戶,這并非簡(jiǎn)單的普通工具。在本教程中,我們將向您介紹一款能夠識(shí)別并理解您語音命令的智能機(jī)器人手臂。此機(jī)器手臂通過OpenCV軟件實(shí)現(xiàn)了人臉識(shí)別系統(tǒng)。(為了測(cè)試目的,我們開發(fā)了算法來檢測(cè)小球顏色。)
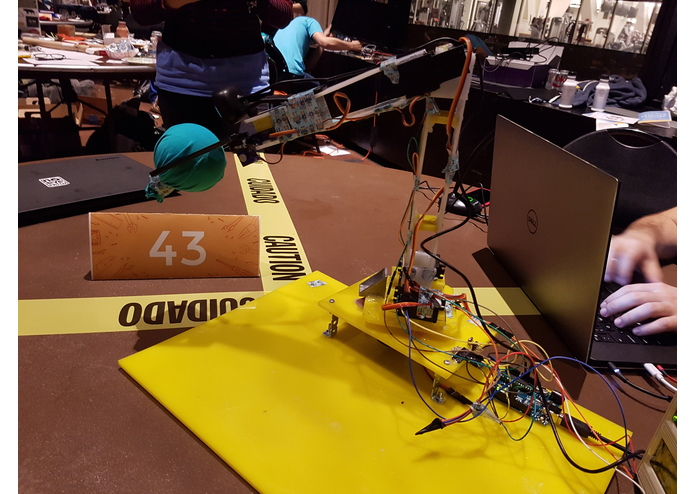
作為MakeMIT硬件馬拉松項(xiàng)目的一部分,我與同事Isac Andrei和VladNiculescu合作研發(fā)了該智能機(jī)器人手臂。由于其創(chuàng)新程度和創(chuàng)造性,該項(xiàng)目在硬件馬拉松中排名前10。
硬件
Arduino UNO
麥克風(fēng)
網(wǎng)絡(luò)攝像頭
軟件
Arduino IDE
GitHub (https://github.com/DevicePlus/SmartRoboticArm)
工具
膠槍
丙烯酸樹脂
螺絲
膠帶
電鋸
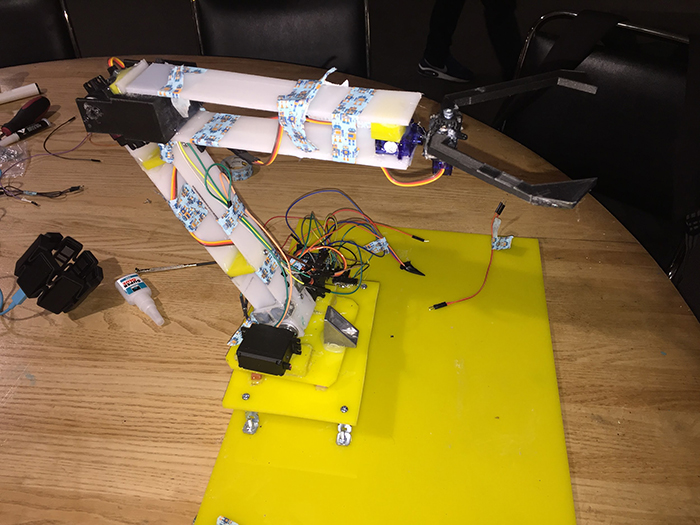
第一步:結(jié)構(gòu)與力學(xué)
處理機(jī)器手臂的手腕時(shí),必須非常小心。如果不考慮伺服電機(jī)角度就開始組裝手腕部件,那么可能會(huì)導(dǎo)致手臂發(fā)生故障——機(jī)器人手臂可能發(fā)生您無法控制的混沌行為。在步驟1中,您需要做的就是將5臺(tái)伺服電機(jī)連接到Arduino開發(fā)板上,并找到每個(gè)伺服機(jī)構(gòu)的正確位置。正確的順序是自下而上進(jìn)行校準(zhǔn)。
I.底座
底座設(shè)計(jì)為可向左移動(dòng)90度,也可向右移動(dòng)90度。將它放置在金屬升降機(jī)上進(jìn)而使基座可以旋轉(zhuǎn)。這是一個(gè)關(guān)鍵部分,因?yàn)楫?dāng)發(fā)出語音命令的人移動(dòng)時(shí),手臂必須跟隨并追蹤人物。而且這種跟隨必須準(zhǔn)確,以便攝像頭總能發(fā)現(xiàn)人臉。
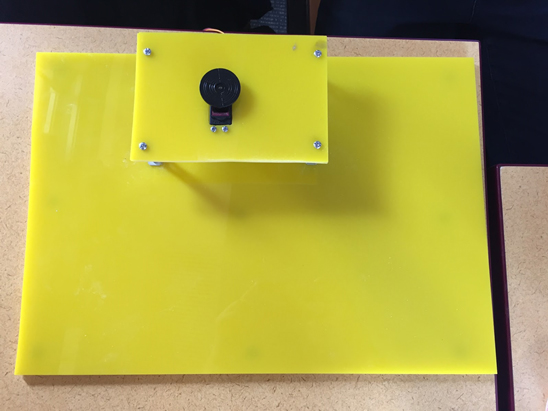
圖1:底座頂視圖
底座隨動(dòng)系統(tǒng)安裝在一個(gè)40 x 30厘米的大亞克力板上,以保持穩(wěn)定。您也可以用更強(qiáng)大的材料替代亞克力板,從而支撐能夠拾起重物的大機(jī)器人手臂。
伺服電機(jī)安裝在一塊12 x 12厘米的較小亞克力板上。我們?cè)谛“逯虚g鉆取了一個(gè)與伺服電機(jī)尺寸相同的孔。然后,將伺服電機(jī)用螺絲擰到孔上(圖2)。
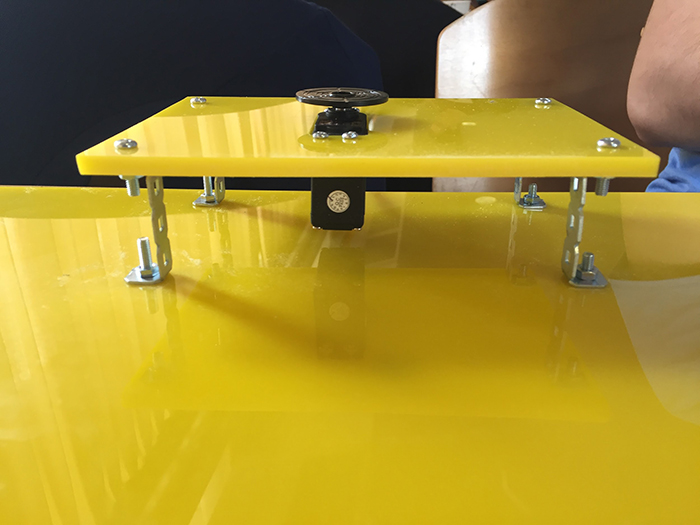
圖2:底座(前視圖)
II.肩部
肩部由兩臺(tái)伺服電機(jī)組成,它們相互配合以拾取物體并放置在正確的位置。該項(xiàng)目最重要的校準(zhǔn)就在肩部。這兩個(gè)伺服系統(tǒng)必須完美結(jié)合,從Arduino開發(fā)板上獲得完全相同的命令,并且必須反相同步。為了獲得良好的同步性,將兩臺(tái)電機(jī)放置在機(jī)器人手臂上之前,必須將其面對(duì)面放置并通過編程擺動(dòng)到同一側(cè)。
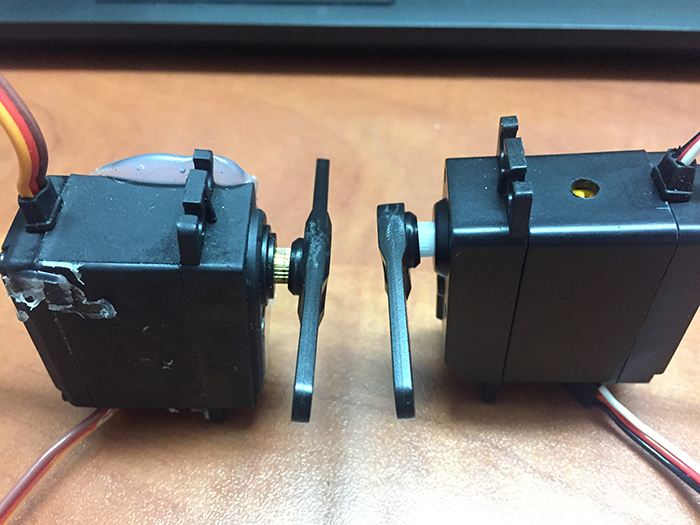
圖3:伺服電機(jī)同步性
如果它們的行為不一致,那么處于上游位置的伺服電機(jī)會(huì)強(qiáng)制第二個(gè)電機(jī)移動(dòng),從而產(chǎn)生短路,最終導(dǎo)致第二個(gè)伺服電機(jī)燒掉。
如果伺服系統(tǒng)的分辨率不一樣,您將無法使它們同步。在這種情況下,最好的辦法則是僅使用一種伺服電機(jī)。如果它們質(zhì)量很好,那么實(shí)際扭矩會(huì)與數(shù)據(jù)表相同,并且具有提升重物的能力。
另外,為了安全起見,在肩部的基座上裝一個(gè)旋鈕非常好。您也可以使用金屬支架,將其放置到所需角度,以防止機(jī)械臂墜落。
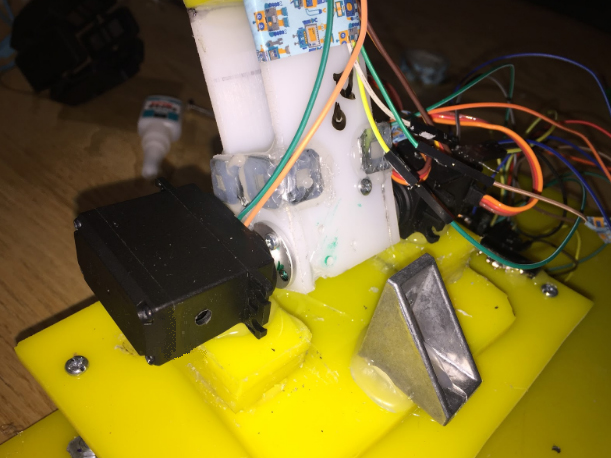
圖4:肩部組件
圖4顯示了我們之前構(gòu)建的安裝在底座上的肩部。伺服機(jī)構(gòu)固定的部位采用旋轉(zhuǎn)結(jié)構(gòu)。肩部必須牢固地固定在基座上,但也必須能夠自由旋轉(zhuǎn)。平衡旋轉(zhuǎn)部分的每一邊也很重要,因?yàn)槲覀兊难b置含有一些較重的支撐金屬部件。中心重量必須相同,這樣機(jī)器手臂旋轉(zhuǎn)時(shí)才不會(huì)掉落。對(duì)于這一部分,我們還放置了一個(gè)金屬筋(即金屬彎頭),以便伺服機(jī)構(gòu)沒有插入時(shí)維持機(jī)器臂重量。
III.肘部
現(xiàn)在,我們來看一下肘部。肘部伺服部分通過手臂高度控制。由于手臂必須返回到原來位置,所以肘部延伸部分與肩部之間的最大角度不得超過100度。我們對(duì)該機(jī)器人手臂原型的肘部伺服系統(tǒng)進(jìn)行編程,讓手臂撿起一個(gè)球——系統(tǒng)會(huì)協(xié)調(diào)捕捉器和肩膀,兩者相互配合,最終將球拾起。
肘部的工作原理如下:
當(dāng)肘部延伸部分與肩部之間的角度較小時(shí),肩部的角度將增大;
當(dāng)肘部和肩部之間的角度較大時(shí),肩部的角度將會(huì)減小。
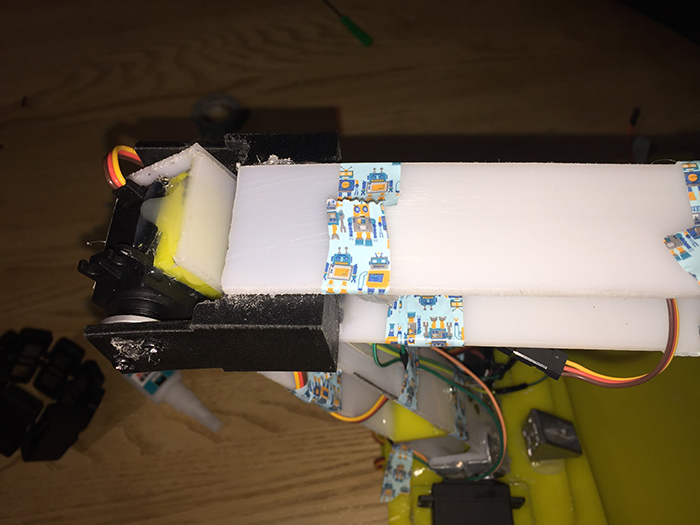
圖5:肘部
肘部使用SketchUp STL設(shè)計(jì),并用3D打印機(jī)打印。(STL擴(kuò)展可以將圖形轉(zhuǎn)換為能夠打印的3D模型)。根據(jù)設(shè)計(jì),肘部在允許彎曲的角度連接2個(gè)延伸部分。
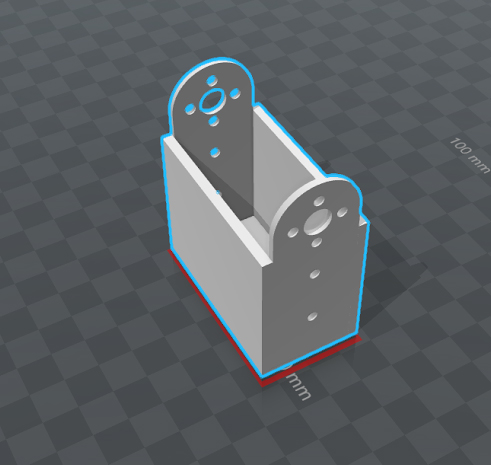
圖6:肘部的3D模型
當(dāng)然,肘部的延伸部件需要能夠很容易地抬起,所以除了肘部,延伸部分不應(yīng)連接其他任何東西。每個(gè)丙烯酸樹脂延伸部件尺寸為20 x 7厘米。延伸部分的另一端用小丙烯酸片粘合起來,以便將兩部分固定在一起。您可以改變尺寸,但是由于伺服機(jī)構(gòu)的限制,機(jī)械臂的尺寸不應(yīng)太大
如果您決定更改尺寸(比如制作一個(gè)較小的手臂),那么請(qǐng)確保計(jì)算出零件的正確尺寸。否則,手臂將發(fā)生故障,無法拾起重物。網(wǎng)絡(luò)攝像機(jī)安裝在延伸部件上。
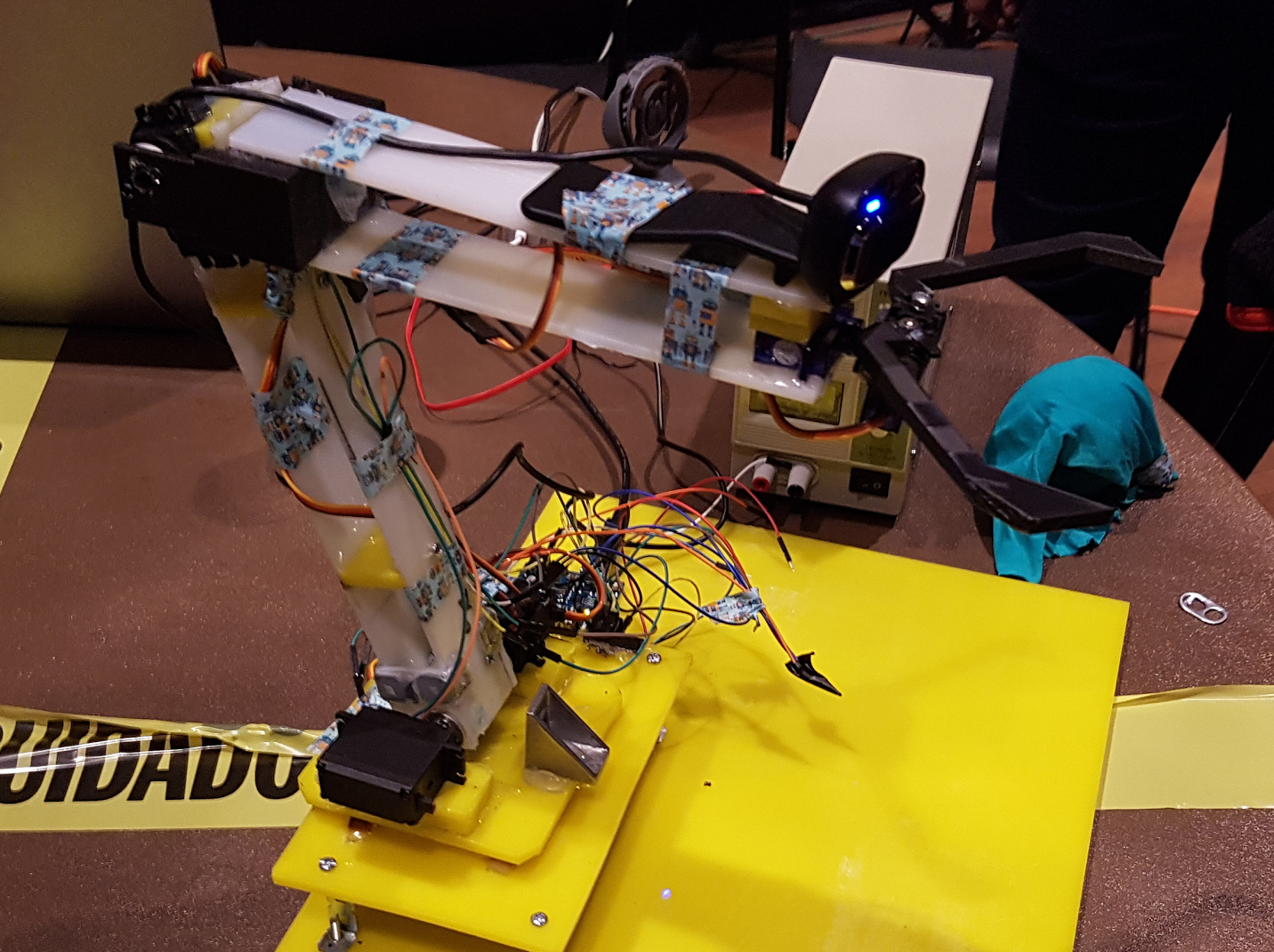
圖7:安裝在機(jī)器人手臂上的網(wǎng)絡(luò)攝像頭
VI.手腕
手腕由能夠抓取某些小物體的爪鉗/捕捉器構(gòu)成。在本文中,我們以抓取小球?yàn)槔.?dāng)然,手臂還可以抓取并提起適合爪鉗的其他物體。您還可以根據(jù)您的具體偏好進(jìn)行設(shè)計(jì)——必要時(shí)請(qǐng)使用SG90 SketchUp文件進(jìn)行必要修改。您需要做的就根據(jù)所抓物體的形狀來改變爪鉗形狀。
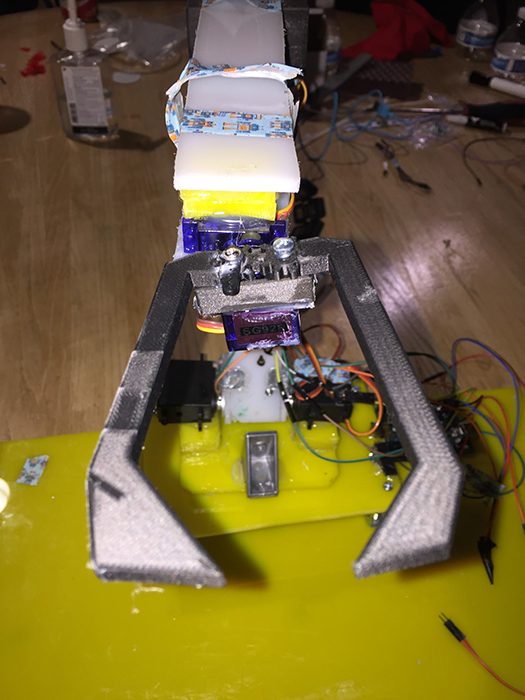
圖8:手腕
手腕部分也使用SketchUp中的3D模型構(gòu)建。如果我們想要拿起較重的物體,可以用爪鉗抓住它們。但是,爪鉗抓取物體時(shí)比較有力,可能會(huì)對(duì)其造成損壞。
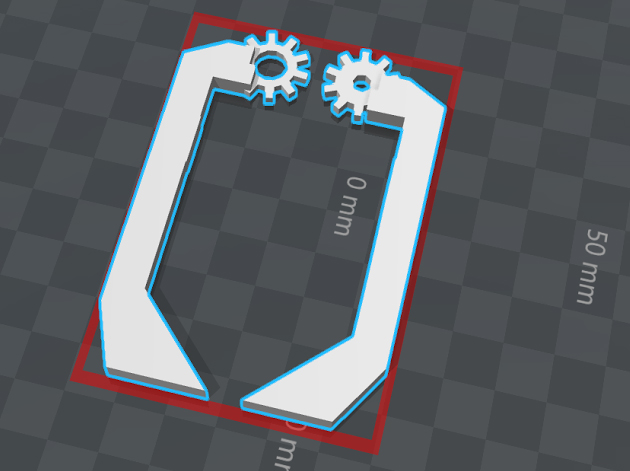
圖9:手腕的3D模型
步驟2:連接伺服電機(jī)
底座
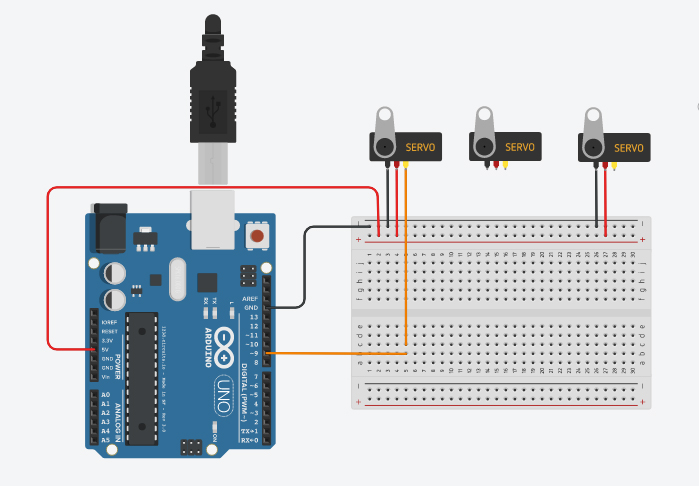
圖10:底座伺服系統(tǒng)的接線圖
底座伺服(圖2)被設(shè)置為從0度開始,這意味著它將從左側(cè)開始搜索用戶。其旋轉(zhuǎn)角度為140度——機(jī)器人手臂可追蹤人員遞送物體的范圍。我們?cè)?度進(jìn)行校準(zhǔn)——這是伺服的中心,葉片面向上方垂直放置。
在控制功能中,基座的分辨率為4度。這是因?yàn)樵谶@種情況下,精度不需要太完美。較高的精度反而會(huì)導(dǎo)致處理變得緩慢。
每次我們都都需要檢查伺服電機(jī)的位置,因?yàn)橄嗷プ饔脤?shí)時(shí)進(jìn)行。為此,我們開發(fā)了兩個(gè)功能:左方和右方。這兩個(gè)功能可以從35個(gè)不同位置追蹤人員。
肩部和肘部
肩部與肘部一起能夠完成一項(xiàng)重要功能。他們必須彎曲機(jī)器人手臂。我們應(yīng)當(dāng)指出以下限制,這很重要:
由于前臂的長(zhǎng)度,肩部的操作角度不能小于45度,我們有2個(gè)例子:
當(dāng)肩部處于最低位置時(shí),機(jī)器人手臂可以拾起最遠(yuǎn)的物體;
當(dāng)肩部處于最高位置時(shí),機(jī)器人手臂可以拾起最近的物體;
我們選定的角度對(duì)于肩部來說已經(jīng)足夠,因?yàn)樗阋宰屖直凼捌鹞矬w并將其交給正確的人員。
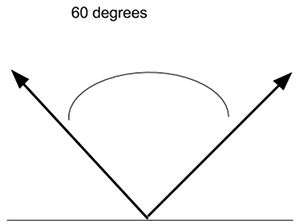
圖11:肩部范圍
肘部的最大位置不能超過140度,因?yàn)樵擁?xiàng)目的目的是在平面上構(gòu)建機(jī)器人手臂,并且將攝像頭與用戶處保持在同一高度。我們認(rèn)為只用70度即可,因?yàn)檫@足以彎曲機(jī)器人手臂。
肩部角度和肘部角度之間的組合使手臂具有很大的靈活性,從而形成完整的機(jī)器手臂,最終實(shí)現(xiàn)拾取物體的功能。
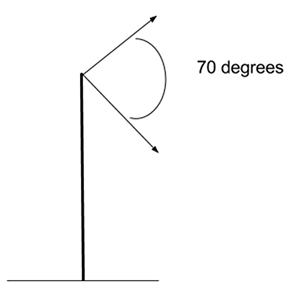
圖12:肘部范圍
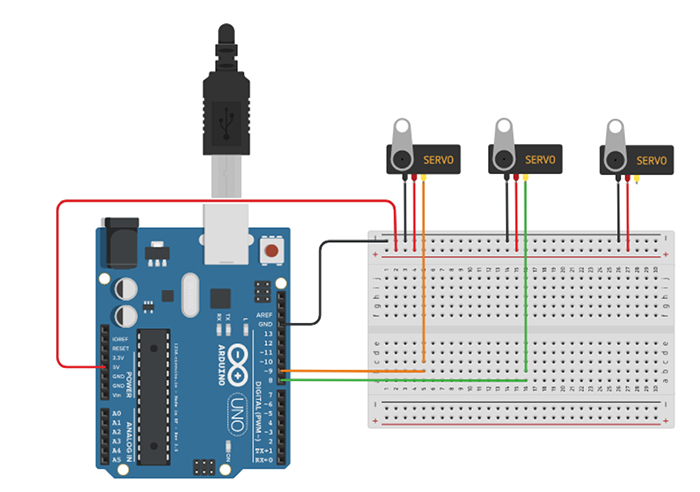
圖13:肩部伺服接線圖
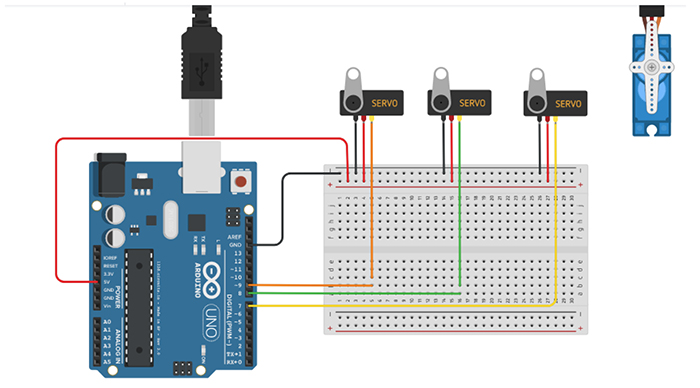
圖14:肘部伺服接線圖
本智能機(jī)器人手臂教程的第1部分描述了手臂的一般機(jī)械結(jié)構(gòu),以及伺服電機(jī)如何與手臂不同連接處進(jìn)行連接的方法。本教程的第2部分將會(huì)介紹幾款用C#編寫的機(jī)器人手臂控制程序。敬請(qǐng)關(guān)注!

Tiberia Todeila
Tiberia目前是布加勒斯特理工大學(xué)電氣工程學(xué)院的大四學(xué)生。她非常熱衷于智能家居設(shè)備的設(shè)計(jì)和開發(fā),旨在讓我們的日常生活更加輕松。
審核編輯黃宇
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29681瀏覽量
212549
發(fā)布評(píng)論請(qǐng)先 登錄
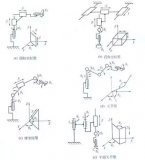
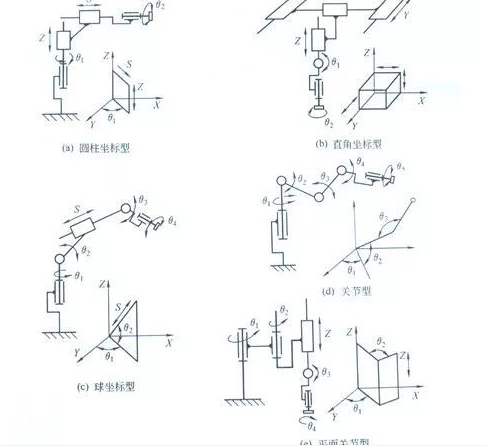
機(jī)器人學(xué)之機(jī)器人手臂的機(jī)械結(jié)構(gòu)和機(jī)電設(shè)置詳解
機(jī)器人手臂5種不同的運(yùn)動(dòng)組合
關(guān)于智能機(jī)器人手臂機(jī)械結(jié)構(gòu)和接線分析制作
怎樣使用Android手機(jī)的藍(lán)牙控制機(jī)器人手臂
Hibot機(jī)器人手臂Float Arm可用于哪些應(yīng)用環(huán)境
機(jī)器人手臂使用哪種型號(hào)的泰和承比較合適
使用Zio控制機(jī)械臂(第1部分)

Arduino機(jī)器人手臂
最酷的Kickstarter機(jī)器人 第2部分 – 以往成果
用于Arduino Due的DIY Braccio機(jī)器人手臂護(hù)罩
如何創(chuàng)建FPGA控制的機(jī)器人手臂

如何創(chuàng)建FPGA控制的機(jī)器人手臂?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論