") 焊接機器人焊縫跟蹤尋位是什么?
焊接機器人焊縫跟蹤尋位是什么?
焊接機器人焊縫跟蹤尋位是什么?
焊接機器人焊縫跟蹤是指在焊接位置前方安裝光學(xué)傳感器進行數(shù)據(jù)采集,或者通過電源的焊接參數(shù)采集,然后傳輸?shù)胶附訖C器人,進行自適應(yīng)的各種模糊控制算法校正焊接機器人或?qū)C的軌跡,實現(xiàn)自適應(yīng)控制,達到實時的焊縫跟蹤。關(guān)于焊接機器人焊縫跟蹤尋位的詳細內(nèi)容工業(yè)機器集成商金紅鷹將為大家詳細介紹。
焊縫跟蹤尋位系統(tǒng)的組成
嚴格來講焊接機器人焊縫跟蹤尋位系統(tǒng)由兩部分組成:焊前通過焊縫尋位(焊縫尋位,指使用一次或多次尋找來定位焊縫的過程,通過在焊接之前移動焊接機器人或編輯機器程序路徑來準確定位將要焊接的接頭。)功能檢測組對間隙是否合適,并精確達到需要焊接接頭點;焊中實時跟蹤焊縫及監(jiān)控產(chǎn)品變形量。
焊縫跟蹤的作用
焊縫跟蹤是在焊接時實時檢測出焊縫的偏差,調(diào)整焊接路徑和焊接參數(shù),保證焊接質(zhì)量的可靠性。
由于工件的加工誤差(工件間的尺寸差異、坡口的準備情況等)、裝夾精度以及焊接時的熱變形等因素的存在,以示教-再現(xiàn)方式工作的焊接機器人在焊接時常常因為焊縫和示教軌跡有偏差而導(dǎo)致焊接質(zhì)量下降。所以焊縫跟蹤是保證焊接機器人焊接質(zhì)量的一個重要的因素。
焊縫跟蹤系統(tǒng)的關(guān)鍵部分
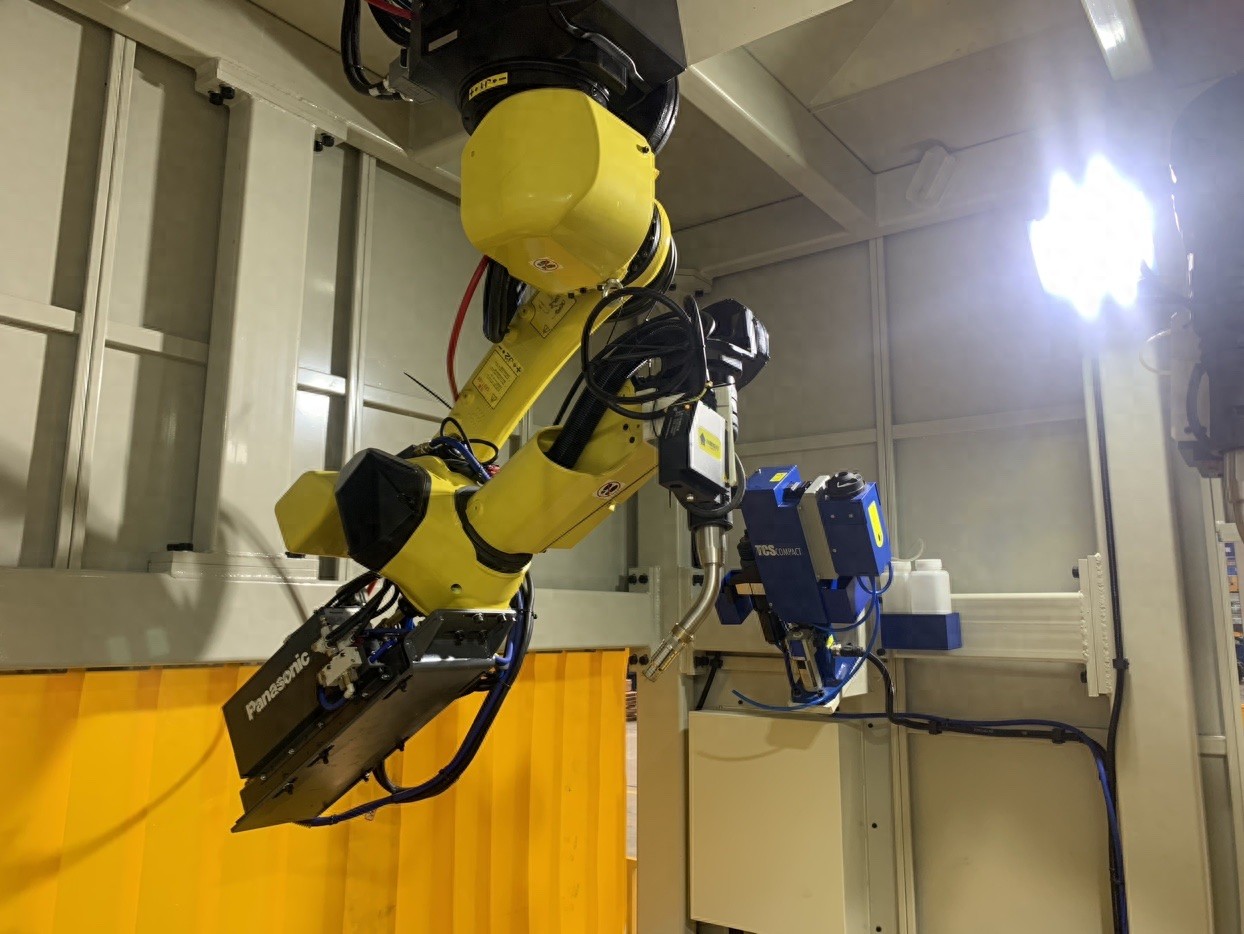
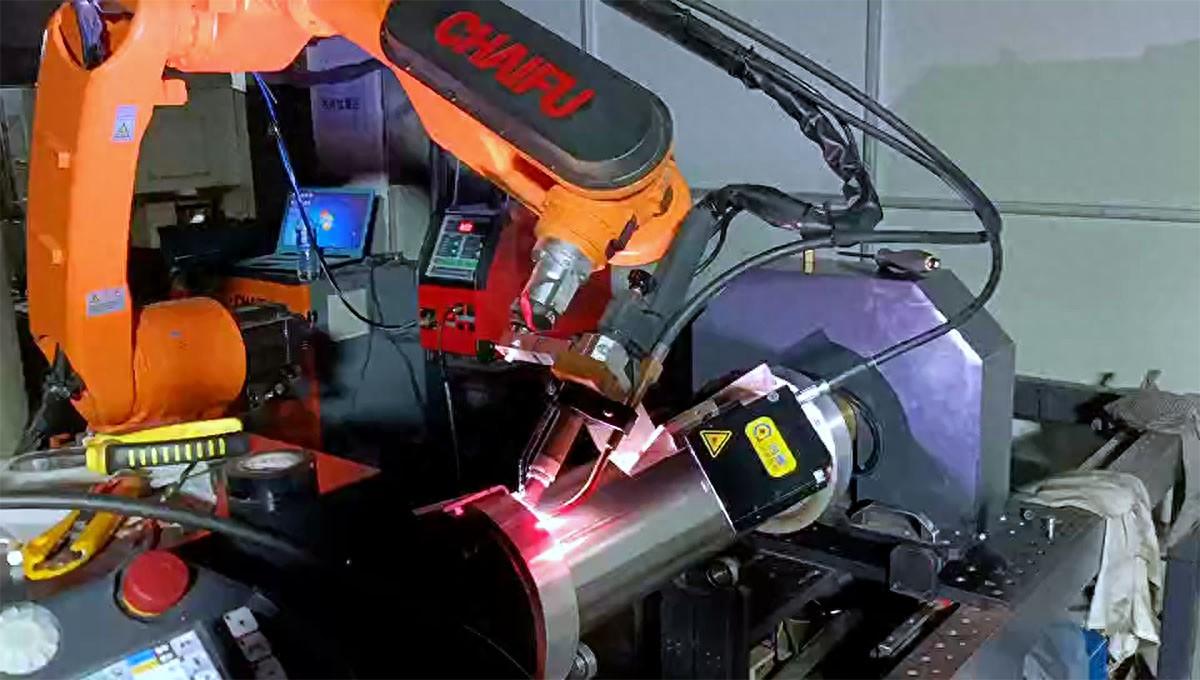
傳感器是焊縫自動跟蹤系統(tǒng)的關(guān)鍵部分。其作用是檢測出焊縫的位置和形狀信息并轉(zhuǎn)化為信號,控制系統(tǒng)對信號進行處理,并根據(jù)檢測結(jié)果控制自動調(diào)節(jié)機構(gòu)調(diào)整焊槍位置,從而實現(xiàn)焊縫自動跟蹤。
激光焊縫跟蹤傳感器配合焊接機器人使用等于是給機器人裝上了眼睛,可以正確引導(dǎo)機器人進行焊接定位。
以上就是焊接機器人的焊縫跟蹤尋位的全部內(nèi)容,希望對您有所幫助。
-
機器人
+關(guān)注
關(guān)注
213文章
29463瀏覽量
211517 -
焊縫跟蹤
+關(guān)注
關(guān)注
0文章
201瀏覽量
10653 -
焊接機器人
+關(guān)注
關(guān)注
16文章
330瀏覽量
15244
發(fā)布評論請先 登錄
視覺定位在焊接機器人中的作用
焊接機器人編程技巧與注意事項
焊接機器人安裝與調(diào)試指南
焊接機器人智能化的關(guān)鍵技術(shù)有哪些

如何避免焊接機器人焊縫偏移

創(chuàng)想智控激光焊縫跟蹤系統(tǒng)協(xié)同松下機器人自動焊接高機貼板的應(yīng)用
焊接機器人拖拽軌跡怎么設(shè)置

焊接機器人示教模式怎么設(shè)置

焊接機器人焊縫尋位跟蹤系統(tǒng)的作用
焊接機器人怎么調(diào)焊接速度

六軸焊接機器人多久檢修一次
焊接機器人焊接質(zhì)量下降怎么辦

焊接機器人調(diào)試技巧有哪些






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論