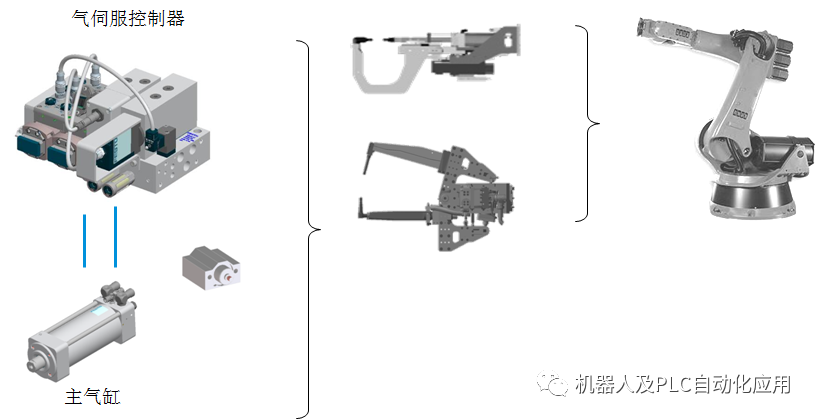
") 氣伺服焊鉗的控制分析V12版
氣伺服焊鉗的控制分析V12版
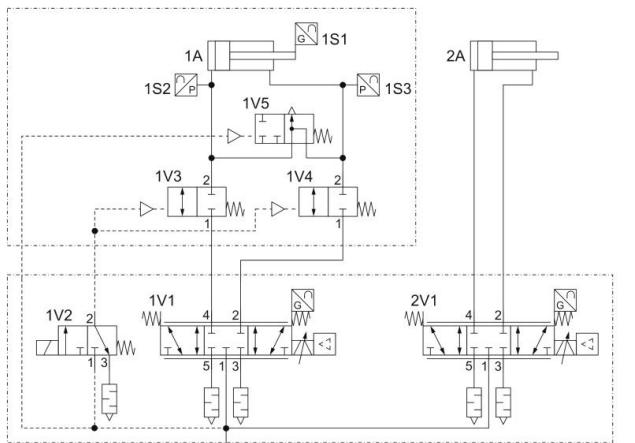
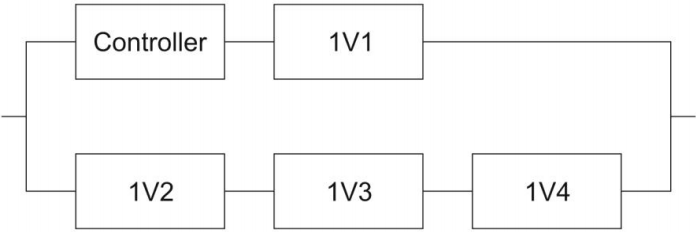
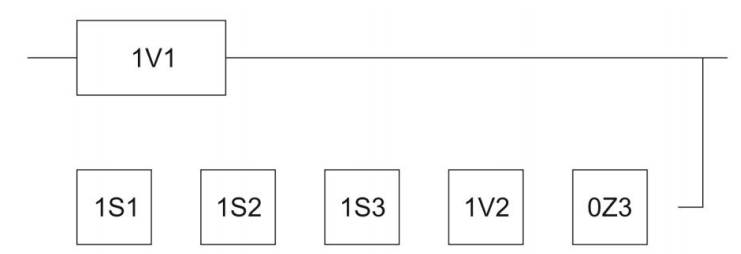
焊鉗氣動(dòng)回路圖.
安全功能保護(hù)裝置免于啟動(dòng),負(fù)載電壓US2斷開
US2關(guān)閉時(shí)安全功能停止的結(jié)構(gòu)
在不關(guān)閉US2的情況下安全功能停止的結(jié)構(gòu)
1.公稱壓力 ,5 ... 10 bar.
2.最高 運(yùn)營壓力, 12 bar.
3.允許的超壓(t = 1秒,無損壞), 16 bar max. 1 sec.
4.控制器主進(jìn)氣口1的工作介質(zhì), 干燥空氣,未潤滑,壓力露點(diǎn)比中溫低至少10 K.
5.工作電壓–負(fù)載電源–邏輯電源24 V ±10 % ,24 V ±10 %.
6.工作電流(負(fù)載和邏輯電源).<4 A,僅當(dāng)現(xiàn)場總線節(jié)點(diǎn)上未連接其他模塊和閥時(shí).
7.最高 數(shù)字量輸出的允許負(fù)載電流, 250 mA.
8.環(huán)境溫度,0 ... +50 °C.
9.貯存溫度, -10 ... +60 °C.
10.中溫, 5 ... +40 °C.
11.最高 允許相對濕度,無凝結(jié), 90 %
12.防護(hù)等級, IP 65.
13.電磁兼容–輻射干擾–抗干擾.
14.抗沖擊, 抗振性-----嚴(yán)重等級1.
1)必須在伺服箱的主壓縮空氣連接的前面安裝一個(gè)5 μm的過濾器(0Z1)。
2)所有連接必須使用適當(dāng)?shù)谋Wo(hù)蓋密封。未使用的ProfiNet連接必須使用適當(dāng)?shù)牟孱^密封。
3)該組件旨在用于工業(yè)環(huán)境。
加載基本參數(shù)集 基本參數(shù)包括優(yōu)化的參數(shù) –位置控制 –力控制 –7.軸操作 –合適的氣缸類型 –電極帽參數(shù)
1.打開新項(xiàng)目
將打開包含標(biāo)準(zhǔn)參數(shù)文件的文件夾(..DefaultParameter)
2.選擇參數(shù)文件xxx.spz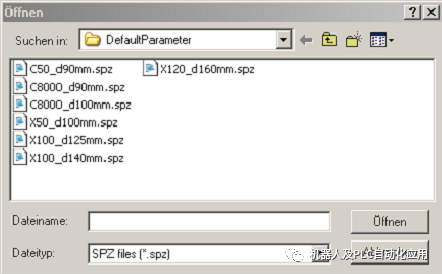
應(yīng)為所有類型的焊槍存儲標(biāo)準(zhǔn)參數(shù)集。例如: 如果使用直徑為140mm的X100噴槍型號,請使用參數(shù)文件“X100_d140m.spz”。
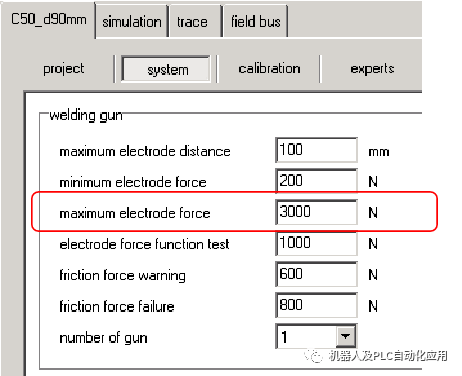
3設(shè)置最大電極力
從噴槍的數(shù)據(jù)表或銘牌上插入最大電極力
4將數(shù)據(jù)加載到控制器中

更換“90”氣缸位移傳感器說明
第1步: 將電路部分的密封蓋板上的4個(gè)螺絲旋開取下。
第2步: 將固定電路板的4個(gè)螺絲旋開取下
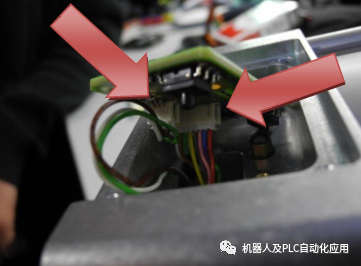
第3步: 取下電路板 - 取下電線插頭 - 注意保持
壓力傳感器的兩個(gè)O型密封圈的清潔!
第4步: 取下氣缸底部的卡簧。
第5步: 取出電纜插座
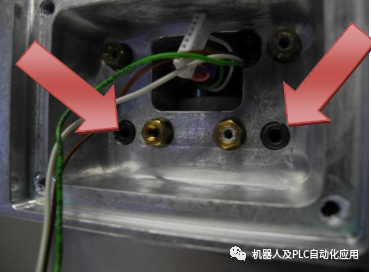
第6步 取下固定位位移傳感器的兩個(gè)螺絲。
第7步: 小心拉動(dòng)電纜,將傳感器一起帶出來。
第8步: 將新的位移傳感器裝入氣缸 - 注意對準(zhǔn)螺絲孔 - 使用Loctite螺紋膠 - 螺絲擰緊力為0.7 Nm
第9步: 通過內(nèi)部的電纜導(dǎo)向?qū)鞲衅鞯碾娎|從頂部伸出。
第10步: 將插座裝入氣缸(不要安裝卡簧),然后將電纜的插頭插入到電路板上。 如果有需要的話可以使用鑷子。
第11步:
固定電路板
注意:
- 不要夾住電纜!
- 密封圈放置的位置正確
在螺絲上使用Loctite 243緊固膠,圖中箭頭所指的螺絲不要使用螺紋膠。
螺絲緊固力為0.7 Nm
第12步: 將電路板的蓋板蓋上 注意密封紙的位置
第13步: 在螺絲上使用Loctite 243 螺絲緊固力為2 Nm
第14步: 裝入卡簧 第15步: 在氣缸上面貼上DOM標(biāo)簽,以標(biāo)識更換過新的傳感器。
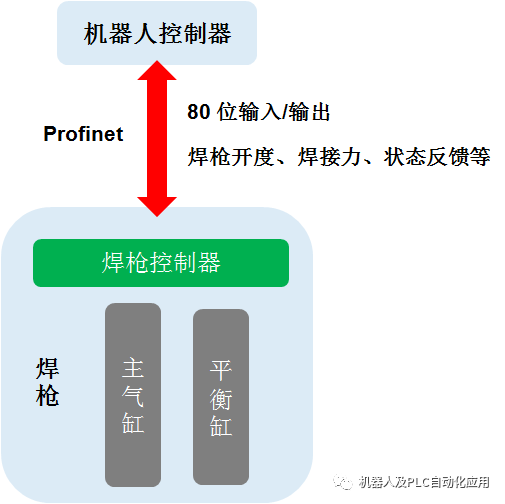
第七軸的速度以及加速度信息,機(jī)器人是怎么通過總線位傳給控制器的?
第七軸模式下,機(jī)器人可以調(diào)節(jié)焊槍運(yùn)動(dòng)速度(插補(bǔ))
機(jī)器人通訊間隔一定,通過每次設(shè)定位置不同,就可以改變運(yùn)動(dòng)速度;比如:通訊周期1ms,時(shí)間0位置為0,第一個(gè)周期設(shè)定位置1mm,第二個(gè)周期設(shè)定位置2mm,則速度為1000mm/s;若第一個(gè)周期設(shè)定位置2mm,第二個(gè)設(shè)定位置4mm,則速度為2000mm/s
每個(gè)缸與閥的組合都有一個(gè)最大速度,比如MPYE-5-3/8的額定流量為2000L/min,缸徑140的話,最大速度為: V=(2000*1000000mm^3)/(3.14*4900*60s)=2166.47mm/s
但是實(shí)驗(yàn)室氣源前面為一段較長的8的氣管,有可能對速度有影響 .
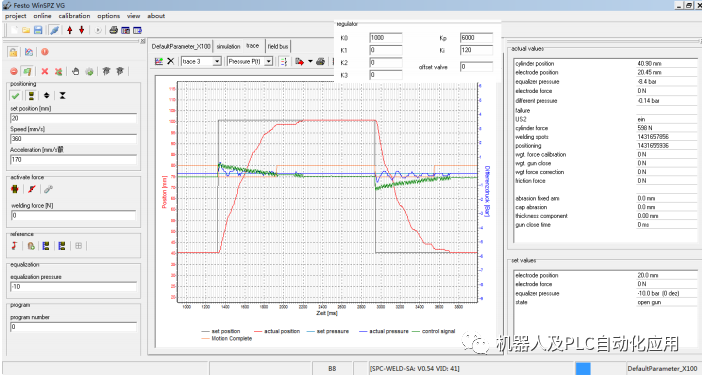
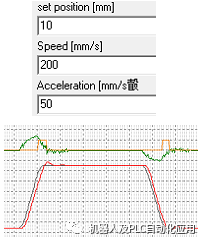
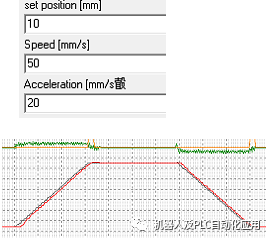
Ptp模式無法通過機(jī)器人改變速度,內(nèi)部有一個(gè)基準(zhǔn)速度,通過軟件是可以改變的;槍的結(jié)構(gòu)不同,槍臂的運(yùn)動(dòng)速度也不同,實(shí)驗(yàn)室焊槍,最大開度315mm左右,標(biāo)定之后,在軟件中設(shè)定速度為100%,定位結(jié)果:缸的速度:(100.58-40.71)/(1.93-1.57)=166mm/s
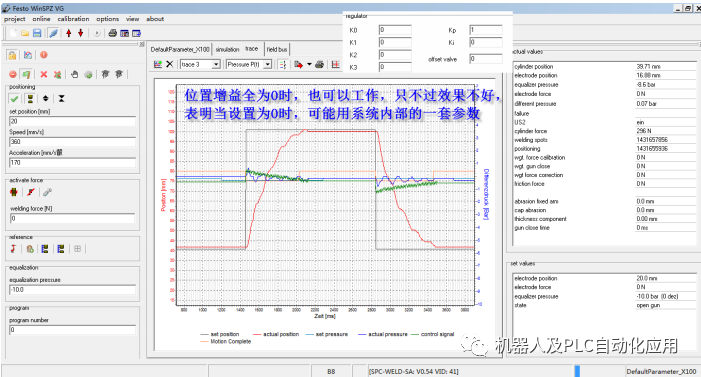
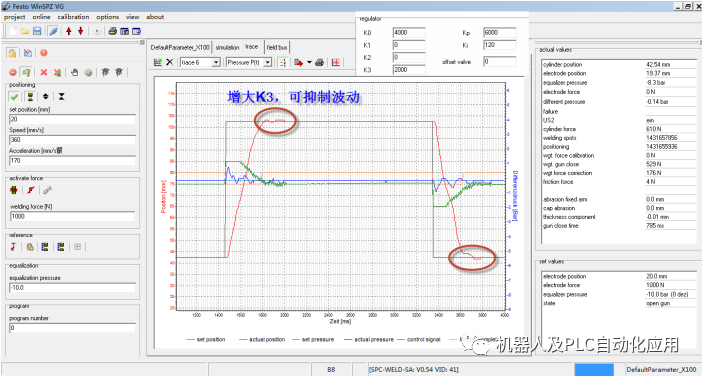
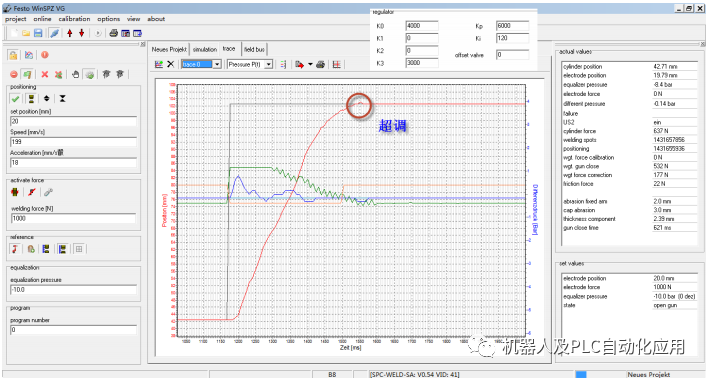
(1.57s,缸40.71mm,槍20mm—1.93s,缸100.58mm,槍200mm) K0是調(diào)節(jié)速度的,K3是抑制波動(dòng)的;通過這兩個(gè)參數(shù),基本上就可以調(diào)到滿意的特性;
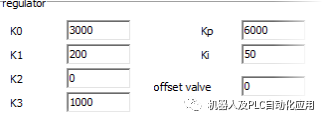
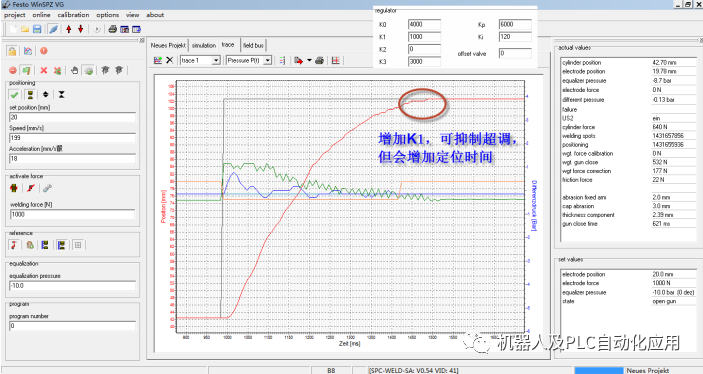
K1不是用來修改速度的,而是用來抑制超調(diào)的,同時(shí),會略微增加定位時(shí)間 K1和K3都有一定的減小靜差的作用 K2的作用不明顯
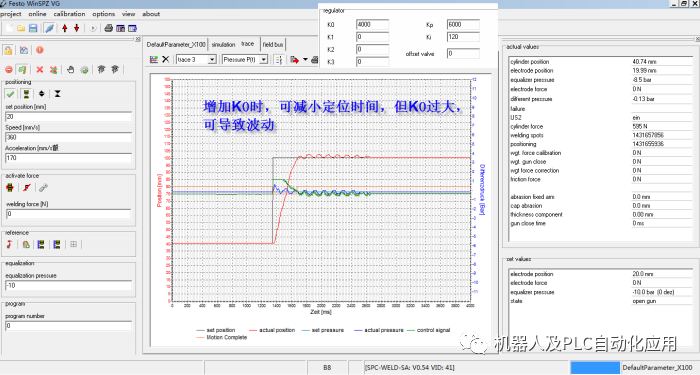
增加K3可以消除抖動(dòng)情況
增加K1,可抑制超調(diào)
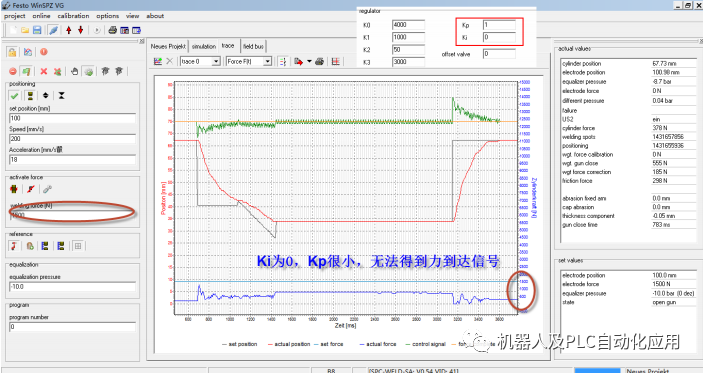
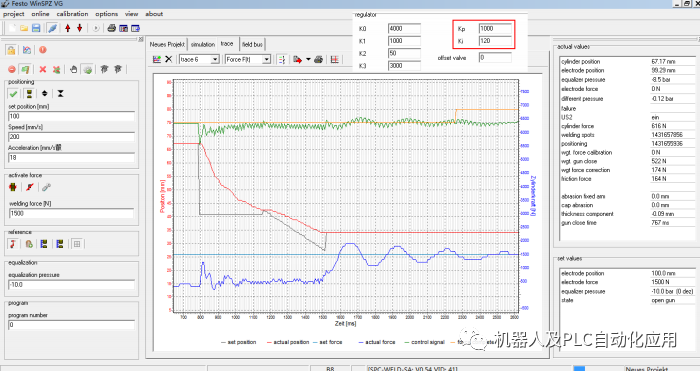
Kp和Ki是pressure controller的比例系數(shù)和積分系數(shù),若Kp設(shè)置為0,會報(bào)regulator參數(shù)錯(cuò)誤,總線位4.03,parameter error 如果設(shè)置kp和ki為1和0,則靜止?fàn)顟B(tài),會出現(xiàn)間斷的短響。
Kp:越大,壓力建立時(shí)間越短
Ki:降低靜差,與Kp要配合使用
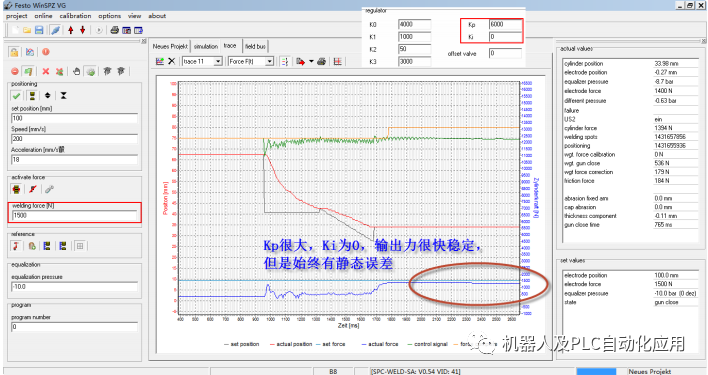
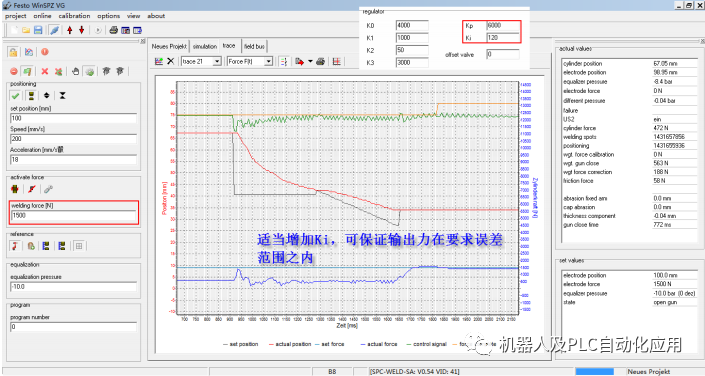
Kp和Ki要配合,若Kp過小,Ki過大,則會出現(xiàn)波動(dòng)
Ka static沒用 Kv static用來調(diào)節(jié)速度 Kv dynamic用來消除動(dòng)態(tài)跟蹤誤差
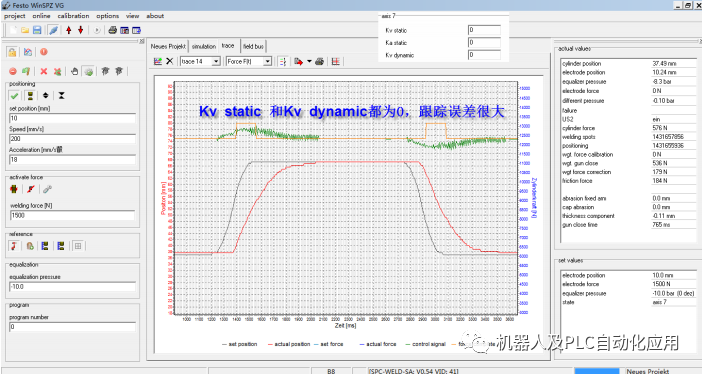
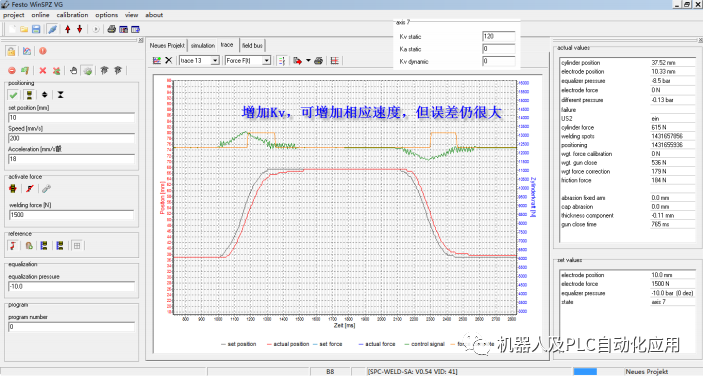
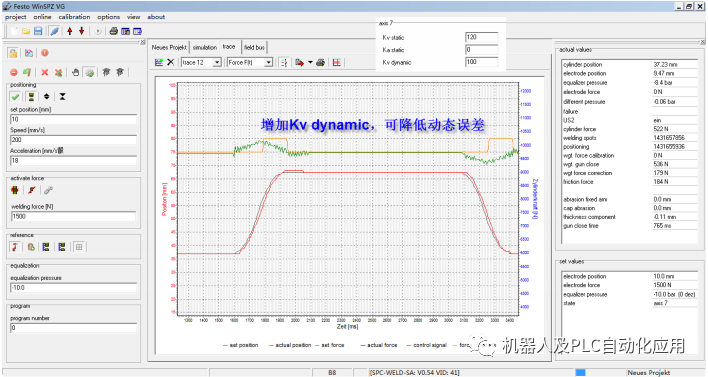
另外,同樣的Ka與Kv參數(shù),運(yùn)動(dòng)速度不同,也會造成跟蹤誤差的不同,速度越慢,誤差越小

焊鉗不能被驅(qū)動(dòng),報(bào)錯(cuò)信息為“Maximum electrode force exceed”(電極帽最大許用壓力過載)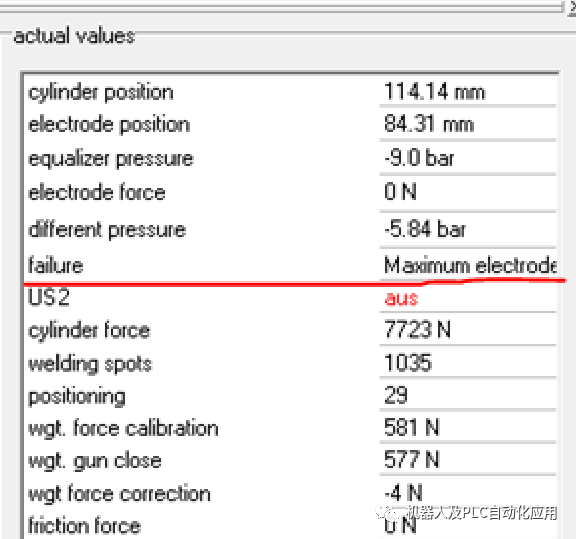
故障分析:
出現(xiàn)電極帽壓力過大的報(bào)錯(cuò)信息,可能有以下幾方面原因。
1、氣源供壓過大
2、電極帽最大許用壓力設(shè)定錯(cuò)誤
3、氣缸壓力傳感器線纜或傳感器存在故障
故障解決方法:
首先檢查氣源供壓,顯示正常,然后對壓力設(shè)定值進(jìn)行查看,均符合標(biāo)準(zhǔn)。
然后對氣缸壓力傳感器線纜進(jìn)行更換,報(bào)錯(cuò)仍未解除,經(jīng)過排除判斷,為氣缸傳感 內(nèi)部故障,所以給出錯(cuò)誤壓力信號,導(dǎo)致報(bào)錯(cuò)。
更換主氣缸后,焊鉗恢復(fù)正常。(注:更換氣缸后一般需重新進(jìn)行軸標(biāo)定)
審核編輯:劉清
-
負(fù)載電流
+關(guān)注
關(guān)注
1文章
431瀏覽量
14639 -
控制器
+關(guān)注
關(guān)注
114文章
16994瀏覽量
183110 -
過濾器
+關(guān)注
關(guān)注
1文章
436瀏覽量
20255
原文標(biāo)題:氣伺服焊鉗的控制分析V12版+外部7軸控制版+壓力故障
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
伺服驅(qū)動(dòng)器的控制方式分析
伺服電機(jī)原理及控制應(yīng)用
伺服電機(jī)的控制方式有哪些?舉例分析
伺服控制系統(tǒng)的分類方式和常見伺服控制系統(tǒng)介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論