") 雷迅Pixhawk V6X飛控實測
雷迅Pixhawk V6X飛控實測
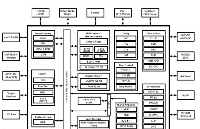
本文的數(shù)據(jù)對比以ArduPilot通用嵌入式平臺軟件為基礎(chǔ)。參與對比的硬件是雷迅 Pixhawk V6X和上一代 STM32F4核芯的硬件平臺(例如Pixhawk1、Pixhawk2.1)。
性能對比的基礎(chǔ)有二:
其一,ArduPilot嵌入式軟件跨STM32平臺的特性。在不同的STM32平臺上采用相同的RTOS、相同的 C++ 接口封裝、相同的調(diào)度策略。
其二,Sugar用于對比的兩架飛機(jī),除電控系統(tǒng)外硬件無差別,且飛機(jī)足夠大(內(nèi)部電控系統(tǒng)的重量對飛機(jī)的影響可忽略)。
關(guān)注問題
Pixhawk V6X采用STM32H753IIK6雙精度浮點運算單元處理器究竟能給飛控軟件運行帶來怎樣的提升?
背景知識
飛控的實時日志里有微秒級時間戳,在日志里統(tǒng)一命名為TimeUS。通過時間戳能夠計算出各個任務(wù)的調(diào)度頻率,從而了解各任務(wù)調(diào)度的穩(wěn)定度和實時度。
數(shù)據(jù)表現(xiàn)
一、低頻任務(wù)
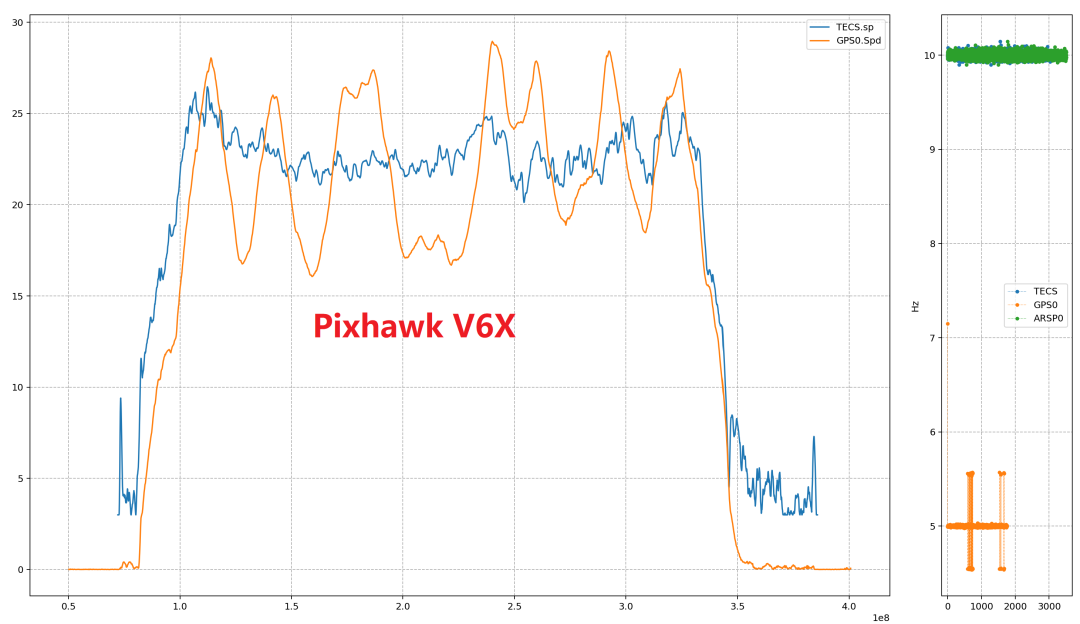
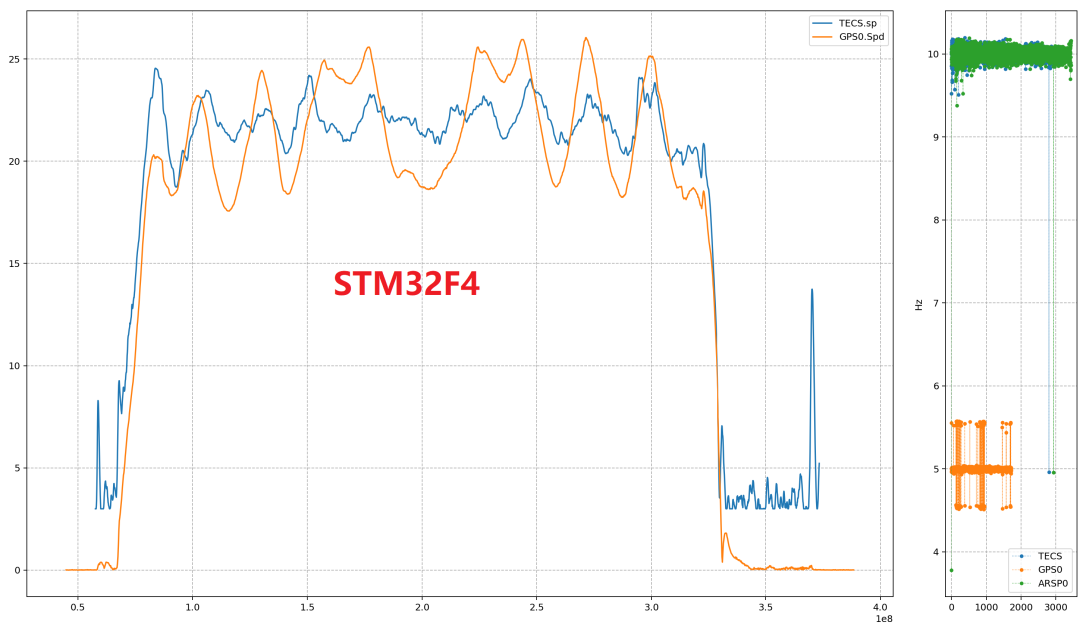
右側(cè)窄圖是通過時間戳換算出的頻率,縱軸單位是Hz。評價如下:
穩(wěn)定度:Pixhawk V6X 的穩(wěn)定度明顯優(yōu)于 STM32F4系列飛控。
10Hz的數(shù)據(jù)收斂度更高,5Hz的數(shù)據(jù)分散相對不頻繁。
Pixhawk V6X 10Hz數(shù)據(jù)全程無降頻,STM32F4系列飛控偶爾會發(fā)生降頻(甚至低于5Hz)。
實時度:Pixhawk V6X與STM32F4系列飛控都可以保證大多數(shù)的調(diào)度頻率符合設(shè)計要求。
二、中頻任務(wù)
穩(wěn)定度:Pixhawk V6X的穩(wěn)定度明顯優(yōu)于STM32F4系列飛控。
實時度:Pixhawk V6X全程的調(diào)度頻率符合設(shè)計要求,STM32F4系列有相當(dāng)一部分?jǐn)?shù)據(jù)與設(shè)計要求差距很大。
Sugar這些數(shù)據(jù)來源于VTOL的固定翼飛行過程,固定翼部分最高設(shè)計頻率是50Hz。多旋翼部分的最高設(shè)計頻率是400Hz,對多旋翼數(shù)據(jù)感興趣的讀者可以按Sugar提的這兩點標(biāo)準(zhǔn)自行測試。
IMU
多重冗余
關(guān)注問題
多重冗余與保障飛行安全有什么關(guān)系?
背景知識
冗余的最大意義莫過于:在一組 IMU 發(fā)生故障時有其它備份可用。基于此點,IMU 數(shù)據(jù)的一致性就非常重要。如果各組 IMU 的一致性不好,那么切換動作的波動就會比較大,甚至由于濾波算法的整參數(shù)不同而不可預(yù)測。
若想要冗余對保障飛行安全有益,則需要對各個備份的數(shù)據(jù)一致性提出要求。
數(shù)據(jù)表現(xiàn)
一、Pixhawk V6X
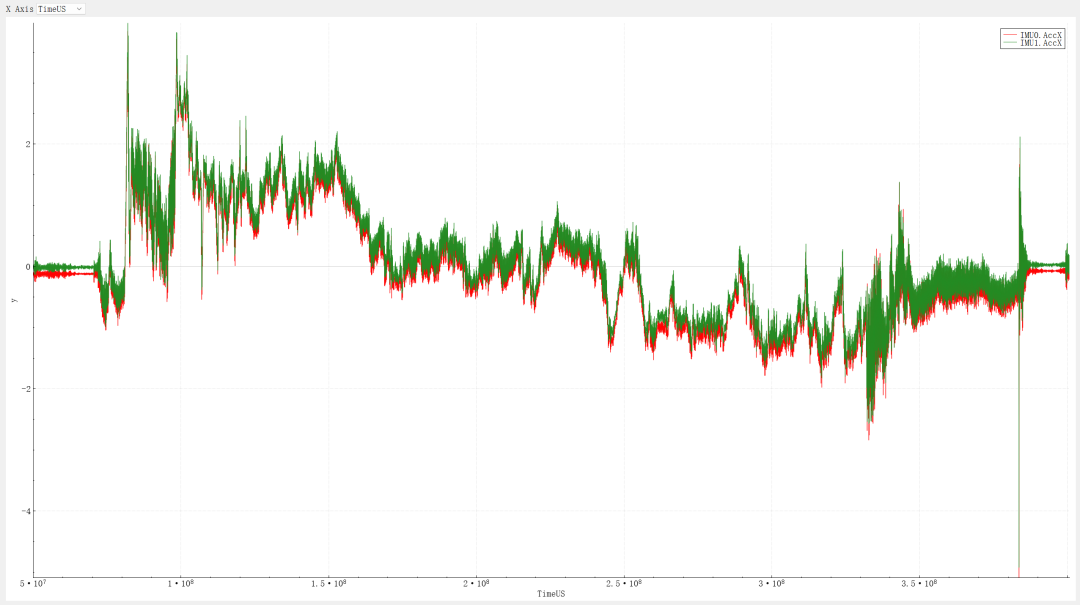
依上 IMU0 和 IMU1 數(shù)據(jù)計算出的姿態(tài)角如下:

Pitch 角的解算結(jié)果對比反映了 IMU0 和 IMU1 數(shù)據(jù)一致性是否可接受(在濾波參數(shù)一致的情況下)。
從 Pixhawk V6X 的解算結(jié)果看,IMU0 和 IMU1 的數(shù)據(jù)一致性表現(xiàn)非常不錯。
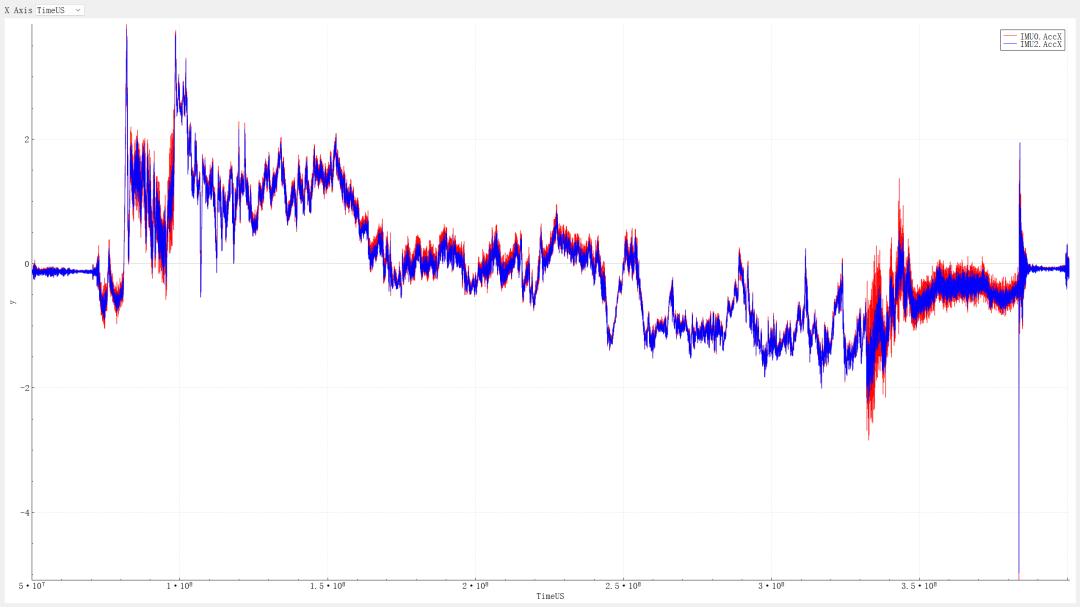
通過EK3_IMU_MASK可以啟用基于第 3 組 IMU 的姿態(tài)解算,通過EK3_PRIMARY可以指定姿態(tài)較好的一組解算結(jié)果作為默認(rèn)優(yōu)先使用的一組結(jié)果。
這里 Sugar 沒有開啟第 3 組姿態(tài)解算,就沒有 IMU2 的解算數(shù)據(jù),感興趣的讀者可以自行開啟測試。
二、STM32F4 系列
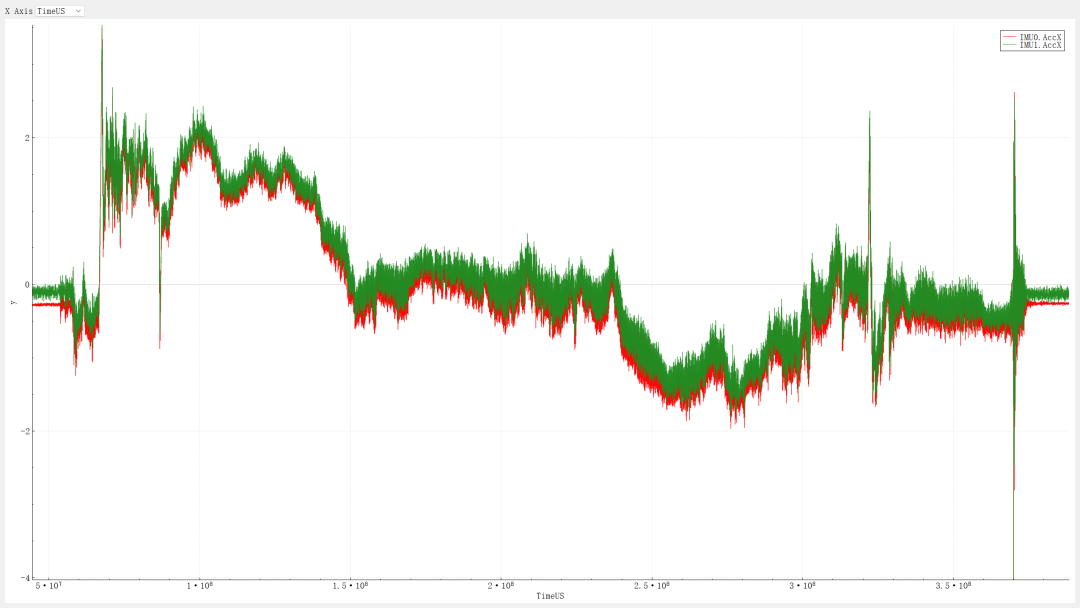

對于STM32F4系列硬件,雖然看上去 IMU0 和 IMU1 的數(shù)據(jù)一致性還說得過去,但是在同樣的濾波參數(shù)下 Pitch角的解算結(jié)果差異比較大。如果想要達(dá)到預(yù)想的備份效果則需要對兩組EKF濾波分別調(diào)參,這無疑增大了工作量,算不上是好的備份。
減震
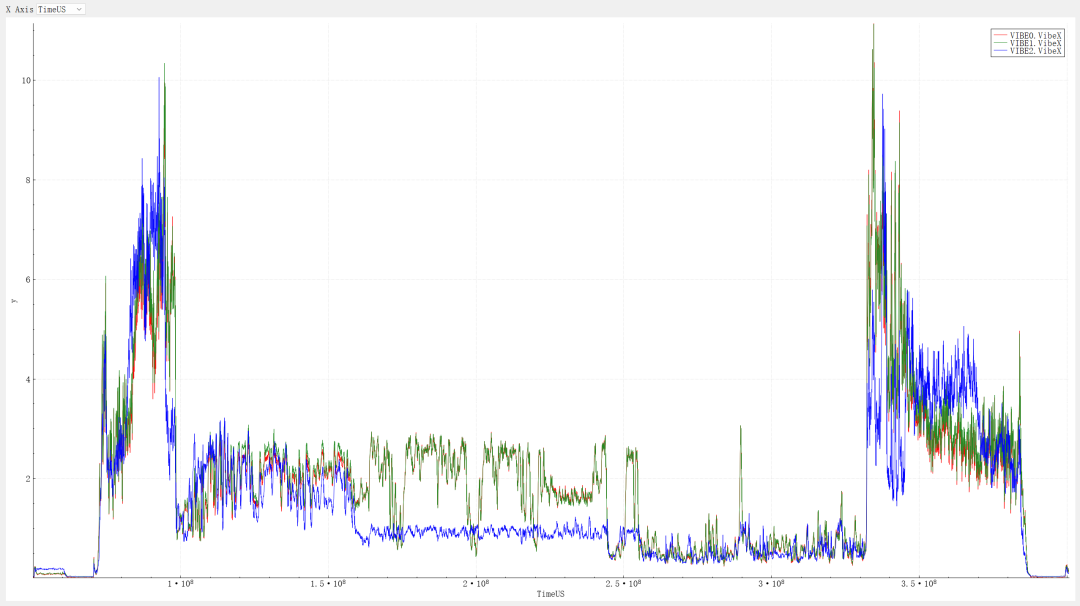
關(guān)注問題
能否通過一個數(shù)據(jù)指標(biāo)評價各組IMU肉眼難以直觀判斷的震動情況?
背景知識
飛控軟件里內(nèi)置了一套實時的類方差算法,以25Hz頻率運行,為各組IMU各軸的實時震動(離散程度)提供判斷依據(jù)。但STM32F4系列因受內(nèi)存大小限制,軟件里只打開了一組計算,而Pixhawk V6X內(nèi)存充足,打開了3組計算。
數(shù)據(jù)表現(xiàn)
磁羅盤
關(guān)注問題
內(nèi)置羅盤與外置羅盤數(shù)據(jù)表現(xiàn)是否一致?
背景知識
接入飛控系統(tǒng)的羅盤有“內(nèi)置”和“外置”之分。外置羅盤通常與GPS在一起,安裝在飛機(jī)外,與飛控不在一起。內(nèi)置羅盤與飛控在一起。因為安裝位置的差異,所以外置羅盤容易規(guī)避EMC問題。而內(nèi)置羅盤因為與飛控一體,就要面對EMC問題。
數(shù)據(jù)表現(xiàn)
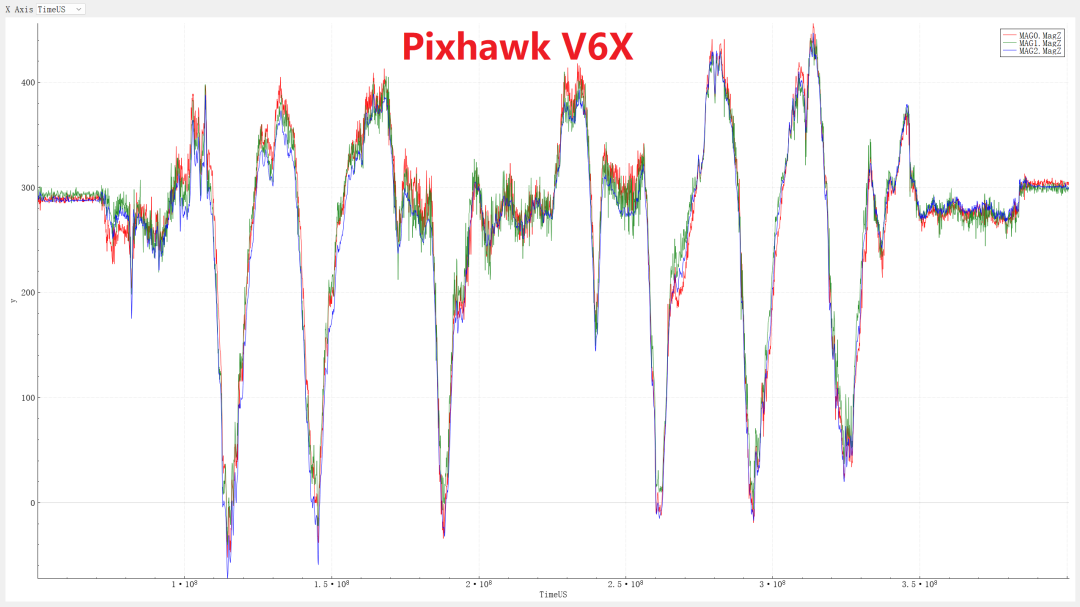
一、Pixhawk V6X
二、STM32F4 系列
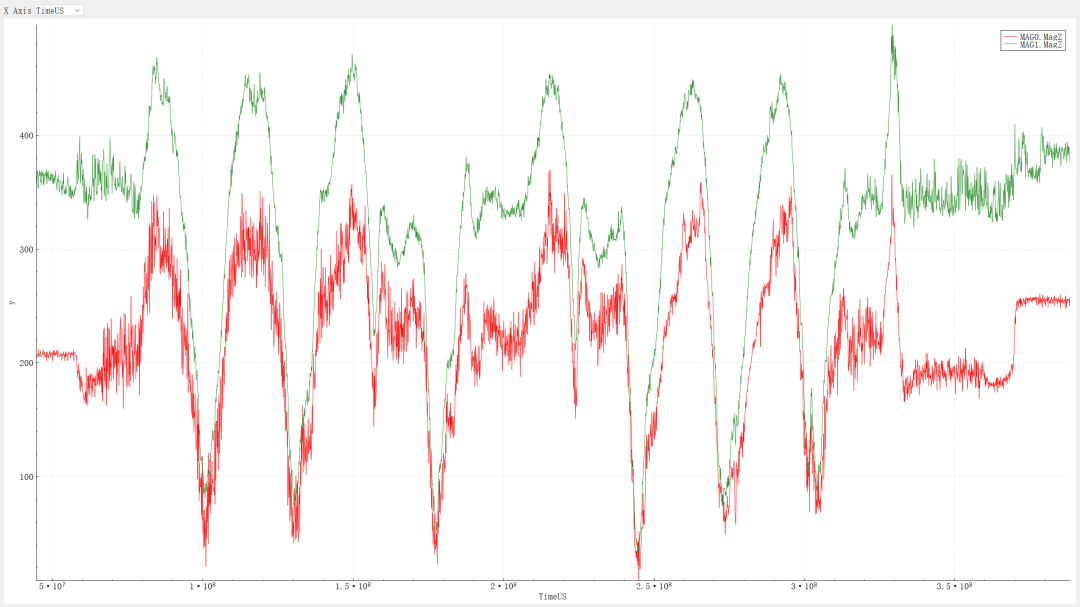
明顯Pixhawk V6X數(shù)據(jù)表現(xiàn)一致性更好,甚至內(nèi)置羅盤(MAG2) 的數(shù)據(jù)相對于外置羅盤還更平滑一些。
Sugar猜測這與Pixhawk 2.1開始的Cube與底板分離的設(shè)計有關(guān),因此也不能肯定 STM32F4系列就一定都不好。但Sugar手里沒有Pixhawk 2.1硬件,因此沒法去證實猜測。
雙 GPS
關(guān)注問題
定位精度是否足夠好?
背景知識
UBlox F9P支持差分定位。差分的使用方式有兩種:一種是“地面端+飛機(jī)端”,另一種是都放在飛機(jī)上配置為“Base+Rover”。最明顯能反映定位精度的是GPS的高度信息,如果不是差分,一個航線下來GPS高度與氣壓高度對比會有明顯的差異變化。
數(shù)據(jù)表現(xiàn)
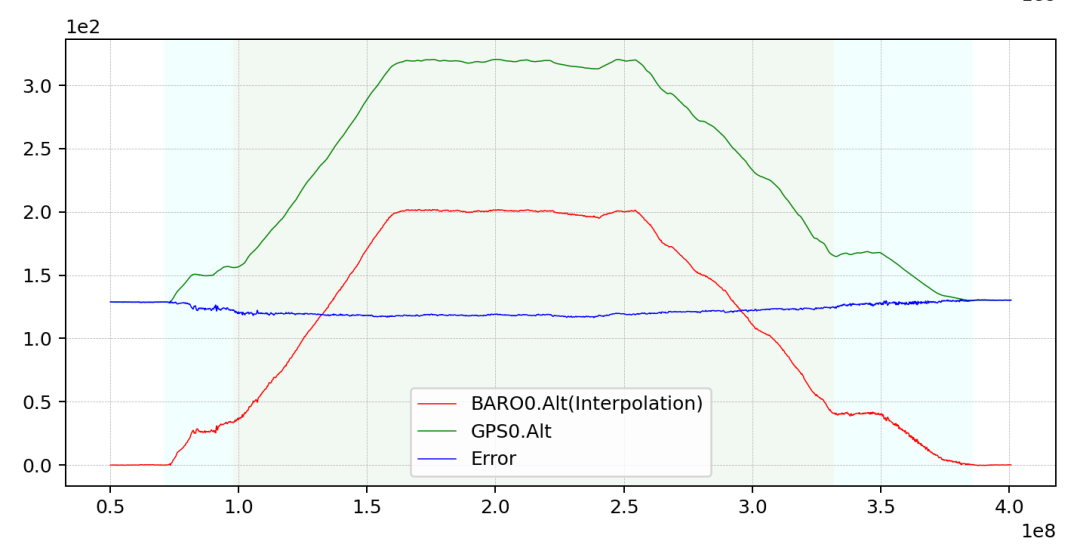
Sugar的配置是“Base+Rover”的方式,全航線下來GPS高程變化與氣壓計高度變化一致,通過差值還能得知Sugar所在位置的GPS高程在130m左右。
最后給Pixhawk V6X 這個MicroSD卡稍凸出一點的設(shè)計和加工裝配精度一個好評,對于 Sugar這樣經(jīng)常拔插卡讀日志的人非常友好,用手上的肉一按就可以,不用像其他飛控一樣要用指甲扣。
審核編輯 :李倩
-
處理器
+關(guān)注
關(guān)注
68文章
19799瀏覽量
233469 -
嵌入式
+關(guān)注
關(guān)注
5138文章
19524瀏覽量
314699 -
C++
+關(guān)注
關(guān)注
22文章
2117瀏覽量
74765
原文標(biāo)題:雷迅Pixhawk V6X飛控實測
文章出處:【微信號:雨飛工作室,微信公眾號:雨飛工作室】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
納雷科技成為PX4開源飛控平臺官方合作伙伴
![[<b class='flag-5'>迅</b>為]Linux開發(fā)小技巧:Remote - SSH插件](https://file1.elecfans.com/web3/M00/0F/2E/wKgZPGfrmbiAN9kJAAD5ig7b5A0900.png)
【北京迅為】itop-3568 開發(fā)板openharmony鴻蒙燒寫及測試-第2章OpenHarmony v3.2-Beta4版本測試
華為云 Flexus X 實例性能實測:速度與穩(wěn)定性的完美結(jié)合

科大訊飛發(fā)布訊飛星火X1深度推理大模型
科大訊飛發(fā)布星火深度推理模型X1
迅為RK3588開發(fā)板實時系統(tǒng)編譯-Preemption系統(tǒng)/ Xenomai系統(tǒng)編譯-設(shè)置屏幕配置
科大訊飛即將發(fā)布訊飛星火深度推理模型X1
MAX15301AA02 CJK設(shè)置輸出0.9V,實測沒有輸出電壓是怎么回事?
【迅為電子】i.MX6UL和i.MX6ULL芯片區(qū)別與開發(fā)板對比
訊飛星火大模型V4.0正式發(fā)布
迅龍軟件加入甲辰計劃“開源實習(xí)生聯(lián)合招聘培養(yǎng)”項目,共建RISC-V?開源生態(tài)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論