") 點(diǎn)云配準(zhǔn)任務(wù)中的點(diǎn)特征與一般點(diǎn)特征的區(qū)別在哪里?
點(diǎn)云配準(zhǔn)任務(wù)中的點(diǎn)特征與一般點(diǎn)特征的區(qū)別在哪里?

0.筆者個(gè)人體會(huì):這個(gè)工作來(lái)自于華中科技大學(xué),發(fā)表于ICCV 2021。這個(gè)工作聚焦于點(diǎn)云的點(diǎn)特征表示學(xué)習(xí),但是,與一般的點(diǎn)特征學(xué)習(xí)方法并不一樣。我們知道,基于深度學(xué)習(xí)的三維點(diǎn)云處理已經(jīng)在近年來(lái)得到了廣發(fā)關(guān)注,從先驅(qū)性的工作例如PointNet到近期的Point Transformer等。這些工作都能有效的學(xué)習(xí)點(diǎn)特征表示。但是,這些方法學(xué)習(xí)點(diǎn)特征都是基于輸入的某一個(gè)點(diǎn)云而言的,所有的操作也都集中在一個(gè)點(diǎn)云上,并且追求特征的描述性,力求能準(zhǔn)確表示三維點(diǎn)云的局部幾何結(jié)構(gòu)。但是,這篇論文針對(duì)點(diǎn)云配準(zhǔn)工作提出了另一種點(diǎn)云設(shè)計(jì)方式。我們知道配準(zhǔn)的目的是求解輸入的點(diǎn)云對(duì)之間的相對(duì)變換以使它們最好的對(duì)齊,在這個(gè)過(guò)程中,聚焦于用學(xué)到的點(diǎn)特征表示構(gòu)造可靠的匹配對(duì)。為此,對(duì)于點(diǎn)特征的魯棒性需求也很重要。為了實(shí)現(xiàn)這個(gè)目的,本工作提出從輸入的兩個(gè)點(diǎn)云出發(fā),利用這兩個(gè)點(diǎn)云之間的交互進(jìn)一步調(diào)整點(diǎn)特征學(xué)習(xí),使得到的點(diǎn)特征表示源于同時(shí)感知到當(dāng)前點(diǎn)云和另一個(gè)需要配對(duì)的點(diǎn)云,從而追求正確的匹配點(diǎn)的可匹配性的提升。也就是說(shuō)這是一個(gè)針對(duì)特定任務(wù)而設(shè)計(jì)的點(diǎn)特征學(xué)習(xí)方法,或許此方法學(xué)到的點(diǎn)特征難以應(yīng)用到其他任務(wù),例如分類、分割等,但對(duì)于匹配、配準(zhǔn)而言應(yīng)該更加適用。1、論文相關(guān)內(nèi)容介紹:論文標(biāo)題:? ?Feature Interactive Representation for Point Cloud Registration作者列表:? ? ?Bingli Wu, Jie Ma, Gaojie Chen, Pei An摘要:點(diǎn)云配準(zhǔn)是使用兩個(gè)點(diǎn)云中的共同結(jié)構(gòu)將它們拼接在一起。為了找出這些共同的結(jié)構(gòu)并使這些結(jié)構(gòu)更準(zhǔn)確地匹配,源點(diǎn)云和目標(biāo)點(diǎn)云的交互信息是必不可少的。然而,當(dāng)前對(duì)顯式建模這種特征交互的關(guān)注有限。為此,我們提出了一個(gè)特征交互表示學(xué)習(xí)網(wǎng)絡(luò),它可以從不同層次探索源點(diǎn)云和目標(biāo)點(diǎn)云之間的特征交互。具體來(lái)說(shuō),我們首先介紹了一種基于點(diǎn)云內(nèi)特征交互的組合特征編碼器(CFE)。CFE提取每個(gè)點(diǎn)云內(nèi)的交互特征并將它們組合起來(lái)以增強(qiáng)網(wǎng)絡(luò)描述局部幾何結(jié)構(gòu)的能力。然后,我們提出了一種點(diǎn)云間的特征交互機(jī)制,它包括一個(gè)局部交互單元(LIU)和一個(gè)全局交互單元(GIU)。前者用于跨兩個(gè)點(diǎn)云的點(diǎn)對(duì)之間的信息交互,從而使一個(gè)點(diǎn)云中的點(diǎn)特征與另一個(gè)點(diǎn)云中的相似點(diǎn)特征能夠相互感知。后者用于根據(jù)兩個(gè)點(diǎn)云的全局交互信息調(diào)整每個(gè)點(diǎn)特征,因此一個(gè)點(diǎn)云具有對(duì)另一個(gè)點(diǎn)云的全局感知。對(duì)部分重疊點(diǎn)云配準(zhǔn)的大量實(shí)驗(yàn)表明,我們的方法實(shí)現(xiàn)了最先進(jìn)的性能。主要貢獻(xiàn):1)我們提出了一種組合特征編碼器來(lái)提取局部區(qū)域的交互特征,其通過(guò)結(jié)合不同層的特征,增強(qiáng)網(wǎng)絡(luò)提取局部幾何和語(yǔ)義信息的能力。2)我們?cè)O(shè)計(jì)了一種新穎的點(diǎn)云間特征交互機(jī)制,使每個(gè)點(diǎn)云都具有另一個(gè)點(diǎn)云的上下文感知,從而為后續(xù)模塊提供更具辨別力的特征3)我們的端到端 FIRE-Net在多種實(shí)驗(yàn)設(shè)置下于 ModelNet40 基準(zhǔn)數(shù)據(jù)集上實(shí)現(xiàn)了最先進(jìn)的性能,從而證明了其有效性和泛化能力。方法介紹:給定輸入點(diǎn)云

, ,我們的目標(biāo)是求解旋轉(zhuǎn)矩陣
,我們的目標(biāo)是求解旋轉(zhuǎn)矩陣 和平移向量
和平移向量 以實(shí)現(xiàn)輸入點(diǎn)云最好的對(duì)齊。Fig1展示了我們的FIRE-Net的整體流程。簡(jiǎn)要地說(shuō),我們的網(wǎng)絡(luò)的輸入包括源和目標(biāo)原始點(diǎn)云。組合特征編碼器(CFE)首先提取源和目標(biāo)的初始特征,將所有點(diǎn)編碼到一個(gè)公共特征空間中。然后,設(shè)計(jì)了一個(gè)局部交互單元(LIU)和一個(gè)全局交互單元(GIU)來(lái)建模點(diǎn)云間的特征交互。最終的交互特征被送到關(guān)鍵點(diǎn)層以選擇兩個(gè)點(diǎn)云中的公共結(jié)構(gòu)。最后,我們使用剛性變換計(jì)算模塊以迭代的方式來(lái)獲得可靠的對(duì)應(yīng)關(guān)系和計(jì)算剛性變換。每個(gè)模塊的詳細(xì)信息將在以下部分進(jìn)行說(shuō)明。
以實(shí)現(xiàn)輸入點(diǎn)云最好的對(duì)齊。Fig1展示了我們的FIRE-Net的整體流程。簡(jiǎn)要地說(shuō),我們的網(wǎng)絡(luò)的輸入包括源和目標(biāo)原始點(diǎn)云。組合特征編碼器(CFE)首先提取源和目標(biāo)的初始特征,將所有點(diǎn)編碼到一個(gè)公共特征空間中。然后,設(shè)計(jì)了一個(gè)局部交互單元(LIU)和一個(gè)全局交互單元(GIU)來(lái)建模點(diǎn)云間的特征交互。最終的交互特征被送到關(guān)鍵點(diǎn)層以選擇兩個(gè)點(diǎn)云中的公共結(jié)構(gòu)。最后,我們使用剛性變換計(jì)算模塊以迭代的方式來(lái)獲得可靠的對(duì)應(yīng)關(guān)系和計(jì)算剛性變換。每個(gè)模塊的詳細(xì)信息將在以下部分進(jìn)行說(shuō)明。
,我們的目標(biāo)是求解旋轉(zhuǎn)矩陣和平移向量以實(shí)現(xiàn)輸入點(diǎn)云最好的對(duì)齊。Fig1展示了我們的FIRE-Net的整體流程。簡(jiǎn)要地說(shuō),我們的網(wǎng)絡(luò)的輸入包括源和目標(biāo)原始點(diǎn)云。組合特征編碼器(CFE)首先提取源和目標(biāo)的初始特征,將所有點(diǎn)編碼到一個(gè)公共特征空間中。然后,設(shè)計(jì)了一個(gè)局部交互單元(LIU)和一個(gè)全局交互單元(GIU)來(lái)建模點(diǎn)云間的特征交互。最終的交互特征被送到關(guān)鍵點(diǎn)層以選擇兩個(gè)點(diǎn)云中的公共結(jié)構(gòu)。最后,我們使用剛性變換計(jì)算模塊以迭代的方式來(lái)獲得可靠的對(duì)應(yīng)關(guān)系和計(jì)算剛性變換。每個(gè)模塊的詳細(xì)信息將在以下部分進(jìn)行說(shuō)明。
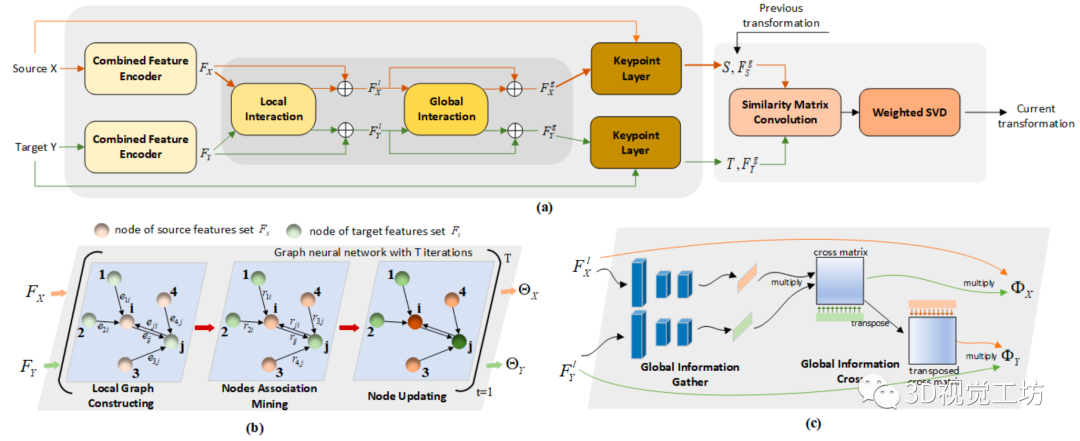
Fig1:(a)FIRE-Net的整體框架,(b)局部特征交互單元,(c)全局特征交互單元。一、組合特征編碼:CFE的主要目標(biāo)是描述源點(diǎn)云和目標(biāo)點(diǎn)云的局部結(jié)構(gòu)。同時(shí),作為我們特征交互模型的第一級(jí),CFE 實(shí)現(xiàn)了點(diǎn)云內(nèi)的特征交互。我們的 CFE 是一個(gè)基于 GNN 的網(wǎng)絡(luò),可以通過(guò)在3D坐標(biāo)空間中構(gòu)建固定圖并應(yīng)用串聯(lián)連接多層來(lái)分層的輸出來(lái)提取點(diǎn)的多級(jí)交互特征,其過(guò)程如圖2所示。

Fig2.組合特征編碼坐標(biāo)空間中的局部圖:為了表示給定點(diǎn)云的局部幾何結(jié)構(gòu),我們將每個(gè)點(diǎn)作為一個(gè)中心節(jié)點(diǎn),分別構(gòu)造一個(gè)kNN圖。
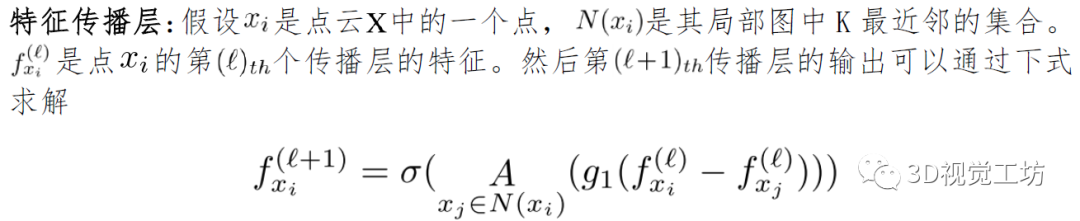
其中 是用于中心點(diǎn)及其近鄰點(diǎn)的相對(duì)特征的共享MLP。A是最大池化。σ是線性層。初始特征:為了增強(qiáng)模塊捕獲幾何和語(yǔ)義信息的能力,我們通過(guò)串接每個(gè)傳播層的輸出向量來(lái)合并低階和高階交互特征。最后,我們?cè)诖拥南蛄可蠎?yīng)用共享 MLP以獲得初始特征
是用于中心點(diǎn)及其近鄰點(diǎn)的相對(duì)特征的共享MLP。A是最大池化。σ是線性層。初始特征:為了增強(qiáng)模塊捕獲幾何和語(yǔ)義信息的能力,我們通過(guò)串接每個(gè)傳播層的輸出向量來(lái)合并低階和高階交互特征。最后,我們?cè)诖拥南蛄可蠎?yīng)用共享 MLP以獲得初始特征 和
和 。這個(gè)過(guò)程可以表述為:
。這個(gè)過(guò)程可以表述為:
是用于中心點(diǎn)及其近鄰點(diǎn)的相對(duì)特征的共享MLP。A是最大池化。σ是線性層。初始特征:為了增強(qiáng)模塊捕獲幾何和語(yǔ)義信息的能力,我們通過(guò)串接每個(gè)傳播層的輸出向量來(lái)合并低階和高階交互特征。最后,我們?cè)诖拥南蛄可蠎?yīng)用共享 MLP以獲得初始特征和 。這個(gè)過(guò)程可以表述為:

其中 是一個(gè)共享的 MLP。
是一個(gè)共享的 MLP。 表示
表示 層中的特征,L表示傳播層數(shù)。二、點(diǎn)云間的特征交互該模塊旨在對(duì)點(diǎn)云交互進(jìn)行建模,它由兩個(gè)串行單元組成:LIU學(xué)習(xí)局部交互函數(shù)以獲得局部交互特征
層中的特征,L表示傳播層數(shù)。二、點(diǎn)云間的特征交互該模塊旨在對(duì)點(diǎn)云交互進(jìn)行建模,它由兩個(gè)串行單元組成:LIU學(xué)習(xí)局部交互函數(shù)以獲得局部交互特征 。然后,GIU學(xué)習(xí)一個(gè)全局交互函數(shù)
。然后,GIU學(xué)習(xí)一個(gè)全局交互函數(shù) 得到全局特征交互
得到全局特征交互
是一個(gè)共享的 MLP。表示層中的特征,L表示傳播層數(shù)。二、點(diǎn)云間的特征交互該模塊旨在對(duì)點(diǎn)云交互進(jìn)行建模,它由兩個(gè)串行單元組成:LIU學(xué)習(xí)局部交互函數(shù)以獲得局部交互特征。然后,GIU學(xué)習(xí)一個(gè)全局交互函數(shù)得到全局特征交互

。請(qǐng)注意,我們將 和作為殘差項(xiàng),為可學(xué)習(xí)尺度參數(shù)和β和原始特征提供附加變化,即,
和作為殘差項(xiàng),為可學(xué)習(xí)尺度參數(shù)和β和原始特征提供附加變化,即,
和作為殘差項(xiàng),為可學(xué)習(xí)尺度參數(shù)和β和原始特征提供附加變化,即,

其中 和
和 是 LIU之后更新的特征、
是 LIU之后更新的特征、 和
和 是GIU之后更新的特征。1.局部特征交互單元:在CFE編碼了輸入點(diǎn)云到一個(gè)共同的特征空間的前提下,點(diǎn)云間的局部交互可以通過(guò)在特征空間上應(yīng)用GNN 來(lái)實(shí)現(xiàn)。特征空間的局部圖:在公共特征空間中,我們有M個(gè)源點(diǎn)云特征和N個(gè)目標(biāo)點(diǎn)云特征。我們首先構(gòu)造一個(gè)混合特征集
是GIU之后更新的特征。1.局部特征交互單元:在CFE編碼了輸入點(diǎn)云到一個(gè)共同的特征空間的前提下,點(diǎn)云間的局部交互可以通過(guò)在特征空間上應(yīng)用GNN 來(lái)實(shí)現(xiàn)。特征空間的局部圖:在公共特征空間中,我們有M個(gè)源點(diǎn)云特征和N個(gè)目標(biāo)點(diǎn)云特征。我們首先構(gòu)造一個(gè)混合特征集 ,然后將其中的每個(gè)特征
,然后將其中的每個(gè)特征 作為中心節(jié)點(diǎn)并應(yīng)用KNN 構(gòu)造局部圖
作為中心節(jié)點(diǎn)并應(yīng)用KNN 構(gòu)造局部圖 ,從而得到混合圖
,從而得到混合圖
和是 LIU之后更新的特征、和 是GIU之后更新的特征。1.局部特征交互單元:在CFE編碼了輸入點(diǎn)云到一個(gè)共同的特征空間的前提下,點(diǎn)云間的局部交互可以通過(guò)在特征空間上應(yīng)用GNN 來(lái)實(shí)現(xiàn)。特征空間的局部圖:在公共特征空間中,我們有M個(gè)源點(diǎn)云特征和N個(gè)目標(biāo)點(diǎn)云特征。我們首先構(gòu)造一個(gè)混合特征集,然后將其中的每個(gè)特征作為中心節(jié)點(diǎn)并應(yīng)用KNN 構(gòu)造局部圖,從而得到混合圖

。構(gòu)建局部圖有兩種策略:(1) 如圖 3左側(cè)所示,無(wú)論鄰居特征屬于 還是
還是 ,我們都連接中心節(jié)點(diǎn)與其鄰居節(jié)點(diǎn)之間的所有邊。(2) 如圖3右側(cè)所示,邊只在屬于不同點(diǎn)云的節(jié)點(diǎn)之間構(gòu)建。在局部圖中,我們將邊視為兩個(gè)節(jié)點(diǎn)間的關(guān)系,例如表示從
,我們都連接中心節(jié)點(diǎn)與其鄰居節(jié)點(diǎn)之間的所有邊。(2) 如圖3右側(cè)所示,邊只在屬于不同點(diǎn)云的節(jié)點(diǎn)之間構(gòu)建。在局部圖中,我們將邊視為兩個(gè)節(jié)點(diǎn)間的關(guān)系,例如表示從 到的關(guān)系。因此在圖3中,類型 1 對(duì)特征空間中的關(guān)系進(jìn)行了更全面的建模,而類型 2 比類型 1 更清楚地將消息從另一個(gè)點(diǎn)云傳遞到中心節(jié)點(diǎn)。
到的關(guān)系。因此在圖3中,類型 1 對(duì)特征空間中的關(guān)系進(jìn)行了更全面的建模,而類型 2 比類型 1 更清楚地將消息從另一個(gè)點(diǎn)云傳遞到中心節(jié)點(diǎn)。
有兩種策略:(1) 如圖 3左側(cè)所示,無(wú)論鄰居特征屬于還是,我們都連接中心節(jié)點(diǎn)與其鄰居節(jié)點(diǎn)之間的所有邊。(2) 如圖3右側(cè)所示,邊只在屬于不同點(diǎn)云的節(jié)點(diǎn)之間構(gòu)建。在局部圖中,我們將邊視為兩個(gè)節(jié)點(diǎn)間的關(guān)系,例如表示從到的關(guān)系。因此在圖3中,類型 1 對(duì)特征空間中的關(guān)系進(jìn)行了更全面的建模,而類型 2 比類型 1 更清楚地將消息從另一個(gè)點(diǎn)云傳遞到中心節(jié)點(diǎn)。
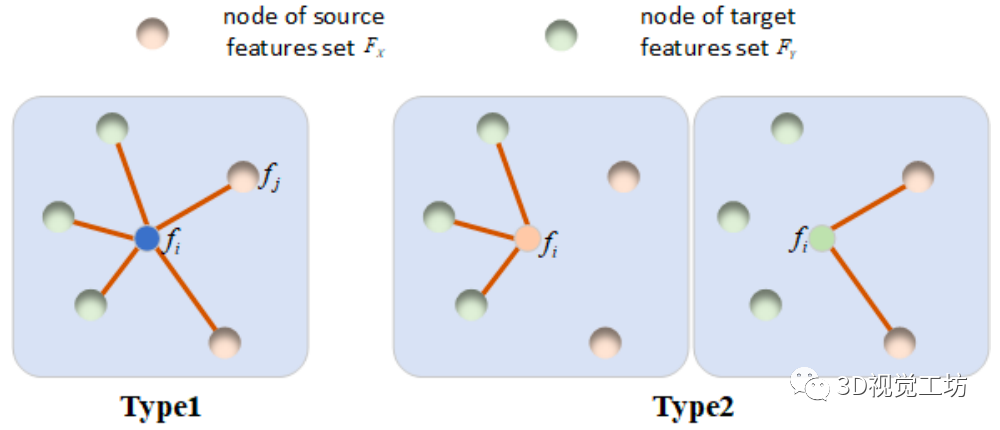
Fig3.特征空間的局部圖結(jié)構(gòu)節(jié)點(diǎn)關(guān)系挖掘:通過(guò)上面定義的局部圖,可以通過(guò)節(jié)點(diǎn)特征及其鄰居點(diǎn)特征的邊來(lái)挖掘節(jié)點(diǎn)關(guān)系,例如,使用 獲得關(guān)系向量
獲得關(guān)系向量 。為了找到更有效的關(guān)系函數(shù),我們研究了三種不同形式的關(guān)系函數(shù)。
。為了找到更有效的關(guān)系函數(shù),我們研究了三種不同形式的關(guān)系函數(shù)。
獲得關(guān)系向量。為了找到更有效的關(guān)系函數(shù),我們研究了三種不同形式的關(guān)系函數(shù)。
其中 表示中心點(diǎn)特征,
表示中心點(diǎn)特征,  是其相鄰特征之一。
是其相鄰特征之一。 是線性層。我們通過(guò)聚合關(guān)聯(lián)向量來(lái)更新中心的特征,即:
是線性層。我們通過(guò)聚合關(guān)聯(lián)向量來(lái)更新中心的特征,即:
表示中心點(diǎn)特征, 是其相鄰特征之一。是線性層。我們通過(guò)聚合關(guān)聯(lián)向量來(lái)更新中心的特征,即:
其中A是聚合函數(shù),例如最大池化。
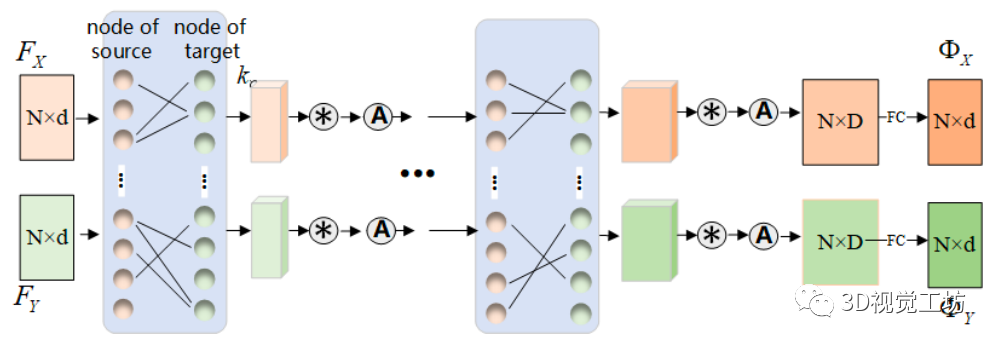
Fig4.局部特征交互單元的流程細(xì)節(jié)局部交互特征:更一般地,我們重復(fù)上述操作幾次,得到一個(gè)高級(jí)關(guān)聯(lián)表示 及其相應(yīng)的聚合輸出特征
及其相應(yīng)的聚合輸出特征 。請(qǐng)注意,局部圖將隨著節(jié)點(diǎn)特征更新而動(dòng)態(tài)重新計(jì)算,如圖4所示。這是與在固定輸入圖上工作的CFE的重要區(qū)別。最后,我們?cè)诰酆陷敵鎏卣魃蠎?yīng)用非線性層來(lái)得到調(diào)整后的特征
。請(qǐng)注意,局部圖將隨著節(jié)點(diǎn)特征更新而動(dòng)態(tài)重新計(jì)算,如圖4所示。這是與在固定輸入圖上工作的CFE的重要區(qū)別。最后,我們?cè)诰酆陷敵鎏卣魃蠎?yīng)用非線性層來(lái)得到調(diào)整后的特征 ,即局部交互特征。這個(gè)過(guò)程可以描述為:
,即局部交互特征。這個(gè)過(guò)程可以描述為:
及其相應(yīng)的聚合輸出特征。請(qǐng)注意,局部圖將隨著節(jié)點(diǎn)特征更新而動(dòng)態(tài)重新計(jì)算,如圖4所示。這是與在固定輸入圖上工作的CFE的重要區(qū)別。最后,我們?cè)诰酆陷敵鎏卣魃蠎?yīng)用非線性層來(lái)得到調(diào)整后的特征,即局部交互特征。這個(gè)過(guò)程可以描述為:

通過(guò)LIU,每個(gè)點(diǎn)的特征具有局部鄰域的特點(diǎn)。在LIU之后,源和目標(biāo)的特征更新為 和
和 ,然后后面緊接GIU。2.全局特征交互單元:為了共享全局信息并全面學(xué)習(xí)源和目標(biāo)之間的交互,我們?cè)O(shè)計(jì)了一個(gè) GIU。所提出的GIU獲得源和目標(biāo)全局特征的交叉矩陣,然后通過(guò)將交叉矩陣投影到它們的潛在表示空間來(lái)更新點(diǎn)特征。全局信息聚合:我們首先聚合
,然后后面緊接GIU。2.全局特征交互單元:為了共享全局信息并全面學(xué)習(xí)源和目標(biāo)之間的交互,我們?cè)O(shè)計(jì)了一個(gè) GIU。所提出的GIU獲得源和目標(biāo)全局特征的交叉矩陣,然后通過(guò)將交叉矩陣投影到它們的潛在表示空間來(lái)更新點(diǎn)特征。全局信息聚合:我們首先聚合 和
和 以獲得全局特征。此聚合操作串聯(lián)池化后的特征,然后使用共享的 MLP對(duì)其進(jìn)行進(jìn)一步調(diào)整,其過(guò)程可以表示如下:
以獲得全局特征。此聚合操作串聯(lián)池化后的特征,然后使用共享的 MLP對(duì)其進(jìn)行進(jìn)一步調(diào)整,其過(guò)程可以表示如下:
和,然后后面緊接GIU。2.全局特征交互單元:為了共享全局信息并全面學(xué)習(xí)源和目標(biāo)之間的交互,我們?cè)O(shè)計(jì)了一個(gè) GIU。所提出的GIU獲得源和目標(biāo)全局特征的交叉矩陣,然后通過(guò)將交叉矩陣投影到它們的潛在表示空間來(lái)更新點(diǎn)特征。全局信息聚合:我們首先聚合和以獲得全局特征。此聚合操作串聯(lián)池化后的特征,然后使用共享的 MLP對(duì)其進(jìn)行進(jìn)一步調(diào)整,其過(guò)程可以表示如下:

其中 是共享的MLP操作。全局信息交叉:對(duì)于源點(diǎn)云全局特征
是共享的MLP操作。全局信息交叉:對(duì)于源點(diǎn)云全局特征
是共享的MLP操作。全局信息交叉:對(duì)于源點(diǎn)云全局特征
和目標(biāo)點(diǎn)云全局特征

,我們構(gòu)建 成對(duì)交互:
成對(duì)交互:
成對(duì)交互:
其中 是交叉特征矩陣,d是特征的維數(shù)。通過(guò)交叉操作,每個(gè)可能的特征交互在交叉特征矩陣中明確建模。全局交互特征:為了將交叉矩陣中包含的信息投影到每個(gè)點(diǎn)特征中,我們將源點(diǎn)云特征乘以交叉矩陣,同時(shí)目標(biāo)點(diǎn)云特征乘以轉(zhuǎn)置交叉矩陣
是交叉特征矩陣,d是特征的維數(shù)。通過(guò)交叉操作,每個(gè)可能的特征交互在交叉特征矩陣中明確建模。全局交互特征:為了將交叉矩陣中包含的信息投影到每個(gè)點(diǎn)特征中,我們將源點(diǎn)云特征乘以交叉矩陣,同時(shí)目標(biāo)點(diǎn)云特征乘以轉(zhuǎn)置交叉矩陣 。這個(gè)過(guò)程由下式表示,最終得到了源點(diǎn)云全局交互特征
。這個(gè)過(guò)程由下式表示,最終得到了源點(diǎn)云全局交互特征 和目標(biāo)點(diǎn)云全局交互特征
和目標(biāo)點(diǎn)云全局交互特征  。
。
是交叉特征矩陣,d是特征的維數(shù)。通過(guò)交叉操作,每個(gè)可能的特征交互在交叉特征矩陣中明確建模。全局交互特征:為了將交叉矩陣中包含的信息投影到每個(gè)點(diǎn)特征中,我們將源點(diǎn)云特征乘以交叉矩陣,同時(shí)目標(biāo)點(diǎn)云特征乘以轉(zhuǎn)置交叉矩陣。這個(gè)過(guò)程由下式表示,最終得到了源點(diǎn)云全局交互特征和目標(biāo)點(diǎn)云全局交互特征 。
通過(guò) GIU,源點(diǎn)云和目標(biāo)點(diǎn)云可以交互全局上下文信息。即源點(diǎn)云的特征不僅集成了源點(diǎn)云全局信息,還集成了目標(biāo)點(diǎn)云全局信息,反之亦然。GIU之后,特征被更新為 和
和 。三、關(guān)鍵點(diǎn)層給定最終的交互特征,我們通過(guò)一個(gè)簡(jiǎn)單高效的關(guān)鍵點(diǎn)層來(lái)選擇源點(diǎn)云和目標(biāo)點(diǎn)云公共的興趣點(diǎn)。我們的關(guān)鍵點(diǎn)層可以表示如下:
。三、關(guān)鍵點(diǎn)層給定最終的交互特征,我們通過(guò)一個(gè)簡(jiǎn)單高效的關(guān)鍵點(diǎn)層來(lái)選擇源點(diǎn)云和目標(biāo)點(diǎn)云公共的興趣點(diǎn)。我們的關(guān)鍵點(diǎn)層可以表示如下:
和。三、關(guān)鍵點(diǎn)層給定最終的交互特征,我們通過(guò)一個(gè)簡(jiǎn)單高效的關(guān)鍵點(diǎn)層來(lái)選擇源點(diǎn)云和目標(biāo)點(diǎn)云公共的興趣點(diǎn)。我們的關(guān)鍵點(diǎn)層可以表示如下:

其中是共享的MLP, 輸出每個(gè)點(diǎn)的顯著性分?jǐn)?shù)。這里,
輸出每個(gè)點(diǎn)的顯著性分?jǐn)?shù)。這里, 提取給定輸入的K個(gè)最大元素的索引。
提取給定輸入的K個(gè)最大元素的索引。 是從原始點(diǎn)云中選擇的關(guān)鍵點(diǎn)集。
是從原始點(diǎn)云中選擇的關(guān)鍵點(diǎn)集。 和
和 表示相應(yīng)的關(guān)鍵點(diǎn)特征集。四、剛性變換計(jì)算給定點(diǎn)對(duì)的坐標(biāo)和特征,剛性變換計(jì)算模塊采用IDAM中的相似矩陣卷積 (SMC) 來(lái)回歸每個(gè)點(diǎn)對(duì)的相似性得分。不同之處在于IDAM將點(diǎn)對(duì)的特征串聯(lián)起來(lái)作為 SMC輸入的一部分,而我們的模型使用點(diǎn)對(duì)的特征差異。最后,SMC獲得的對(duì)應(yīng)關(guān)系被傳遞到SVD層以計(jì)算剛性變換。
表示相應(yīng)的關(guān)鍵點(diǎn)特征集。四、剛性變換計(jì)算給定點(diǎn)對(duì)的坐標(biāo)和特征,剛性變換計(jì)算模塊采用IDAM中的相似矩陣卷積 (SMC) 來(lái)回歸每個(gè)點(diǎn)對(duì)的相似性得分。不同之處在于IDAM將點(diǎn)對(duì)的特征串聯(lián)起來(lái)作為 SMC輸入的一部分,而我們的模型使用點(diǎn)對(duì)的特征差異。最后,SMC獲得的對(duì)應(yīng)關(guān)系被傳遞到SVD層以計(jì)算剛性變換。
輸出每個(gè)點(diǎn)的顯著性分?jǐn)?shù)。這里,提取給定輸入的K個(gè)最大元素的索引。是從原始點(diǎn)云中選擇的關(guān)鍵點(diǎn)集。和表示相應(yīng)的關(guān)鍵點(diǎn)特征集。四、剛性變換計(jì)算給定點(diǎn)對(duì)的坐標(biāo)和特征,剛性變換計(jì)算模塊采用IDAM中的相似矩陣卷積 (SMC) 來(lái)回歸每個(gè)點(diǎn)對(duì)的相似性得分。不同之處在于IDAM將點(diǎn)對(duì)的特征串聯(lián)起來(lái)作為 SMC輸入的一部分,而我們的模型使用點(diǎn)對(duì)的特征差異。最后,SMC獲得的對(duì)應(yīng)關(guān)系被傳遞到SVD層以計(jì)算剛性變換。
審核編輯 :李倩
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
編碼器
+關(guān)注
關(guān)注
45文章
3798瀏覽量
138021 -
建模
+關(guān)注
關(guān)注
1文章
317瀏覽量
61588 -
點(diǎn)云
+關(guān)注
關(guān)注
0文章
58瀏覽量
3960
原文標(biāo)題:點(diǎn)云配準(zhǔn)任務(wù)中的點(diǎn)特征與一般點(diǎn)特征的區(qū)別在哪里?
文章出處:【微信號(hào):3D視覺(jué)工坊,微信公眾號(hào):3D視覺(jué)工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
自動(dòng)駕駛中常提的“點(diǎn)云”是個(gè)啥?
[首發(fā)于智駕最前沿微信公眾號(hào)]在自動(dòng)駕駛系統(tǒng)中,點(diǎn)云技術(shù)作為三維空間感知的核心手段,為車輛提供了精確的距離和形狀信息,從而實(shí)現(xiàn)目標(biāo)檢測(cè)、環(huán)境建模、定位與地圖構(gòu)建等關(guān)鍵功能。那所謂的“點(diǎn)

一種基于點(diǎn)、線和消失點(diǎn)特征的單目SLAM系統(tǒng)設(shè)計(jì)
本文提出了一種穩(wěn)健的單目視覺(jué)SLAM系統(tǒng),該系統(tǒng)同時(shí)利用點(diǎn)、線和消失點(diǎn)特征來(lái)進(jìn)行精確的相機(jī)位姿估計(jì)和地圖構(gòu)建,有效解決了傳統(tǒng)基于點(diǎn)特征的SL

mark點(diǎn)定位的一般原理與步驟
點(diǎn)的位置。一般將 Mark 點(diǎn)放置在 PCB 的邊緣或者角落等相對(duì)穩(wěn)定的區(qū)域。這樣可以減少在后續(xù)工序中受到其他元器件或操作影響的可能性。同時(shí),要考慮 PCB 在制造設(shè)備和檢測(cè)設(shè)備
SN74ALVC164245與SNALVC164245-EP區(qū)別在哪里呢?
SN74ALVC164245與它的增強(qiáng)型器件SNALVC164245-EP區(qū)別在哪里呢?我對(duì)比了數(shù)據(jù)手冊(cè)發(fā)現(xiàn)兩種產(chǎn)品在電氣性能上并沒(méi)有什么差別,這個(gè)“增強(qiáng)”體現(xiàn)在哪里?
發(fā)表于 12-12 08:31
Kaggle知識(shí)點(diǎn):使用大模型進(jìn)行特征篩選
方法依賴于數(shù)據(jù)集中的樣本點(diǎn)進(jìn)行統(tǒng)計(jì)推斷,而基于文本的方法需要描述性的上下文以更好地在特征和目標(biāo)變量之間建立語(yǔ)義關(guān)聯(lián)。這種方法利用了大型語(yǔ)言模型(LLMs)中豐富的語(yǔ)

風(fēng)電變流器是變頻器嗎 風(fēng)電變流器和變頻器的區(qū)別在哪里
變流器也有幾率對(duì)頻率進(jìn)行更改。下面一起來(lái)了解一下風(fēng)電變流器和變頻器的區(qū)別在哪里吧。 一、風(fēng)電變流器是變頻器嗎 風(fēng)電變流器是應(yīng)用于風(fēng)力發(fā)電機(jī)組中
PGA2311P和PGA2311PA主要區(qū)別體現(xiàn)在哪里?一般情況運(yùn)用下能通用嗎?
PGA2311P和PGA2311PA主要區(qū)別體現(xiàn)在哪里,一般情況運(yùn)用下能通用嗎,感謝!!!
發(fā)表于 10-31 07:13
什么是三維點(diǎn)云分割
點(diǎn)云是世界的一種非結(jié)構(gòu)化三維數(shù)據(jù)表示,通常由激光雷達(dá)傳感器、立體相機(jī)或深度傳感器采集。它由一系列單個(gè)點(diǎn)組成,每個(gè)
使用語(yǔ)義線索增強(qiáng)局部特征匹配
視覺(jué)匹配是關(guān)鍵計(jì)算機(jī)視覺(jué)任務(wù)中的關(guān)鍵步驟,包括攝像機(jī)定位、圖像配準(zhǔn)和運(yùn)動(dòng)結(jié)構(gòu)。目前最有效的匹配關(guān)鍵點(diǎn)的技術(shù)包括使用經(jīng)過(guò)學(xué)習(xí)的稀疏或密集匹配器

請(qǐng)問(wèn)一下LM4951A與LM4951的區(qū)別在哪里?
請(qǐng)問(wèn)一下LM4951A與LM4951的區(qū)別在哪里?
我們有將LM4951替換LM4951A后,產(chǎn)品出現(xiàn)POP和CLICK音的問(wèn)題。
LM4951的原理圖見(jiàn)附件。
發(fā)表于 10-18 06:27
LM3886尾綴T和TF之間主要區(qū)別在哪里?
LM3886尾綴T和TF之間主要區(qū)別在哪里?
我一直用LM3886TF,但最近缺貨改用LM3886T替代,但是發(fā)現(xiàn)LM3886T工作相對(duì)要熱一些
發(fā)表于 10-09 08:30
變壓器中性點(diǎn)接地方式的安排一般如何考慮
變壓器中性點(diǎn)接地方式的安排是一個(gè)復(fù)雜而關(guān)鍵的過(guò)程,需要考慮多個(gè)因素以確保電力系統(tǒng)的安全、穩(wěn)定和高效運(yùn)行。以下是對(duì)變壓器中性點(diǎn)接地方式安排的一般考慮:
WXZ196微機(jī)消諧裝置的特征具體體現(xiàn)在哪里
WXZ196微機(jī)消諧裝置的特征具體體現(xiàn)在哪里?微機(jī)消諧裝置(全稱:微機(jī)電力諧振診斷消除裝置)是放在放在PT的二次側(cè)(所以也叫二次消諧)消除鐵磁諧振的儀器。它與一次消諧器的區(qū)別在于微機(jī)消
怎么判斷電容三點(diǎn)式和電感三點(diǎn)式
在電子電路中,電容三點(diǎn)式和電感三點(diǎn)式振蕩電路是兩種常見(jiàn)的振蕩電路類型,它們的主要區(qū)別在于反饋元件(電容或電感)與晶體管三個(gè)極(基極、發(fā)射極、集電極)的連接方式。





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論