 純電動汽車的典型整車控制系統及芯片方案解析
純電動汽車的典型整車控制系統及芯片方案解析

1.背景
動力總成(Powertrain)系統是車輛的重要組成部分,它負責從車輛的儲能單元進行能量轉換,也即生成動力,然后將動力傳送給車輛的驅動系統,從而驅動車輛行駛前進。
盡管傳統燃油的內燃機車(ICEV)與電動汽車(Electric Vehicle)有著完全的不同的動力總成設計和部件,但從Powertrain架構上來看依然可以分為“儲能系統”和“驅動系統”兩大主要部分。EV使用動力電池取代了油箱來儲能,相應地也增加了“電池管理系統(Battery Management System, BMS)”。同時EV采用了“電機(Motor)”取代內燃機引擎(Engine)來驅動車輛,因此“電機控制器(Inverter)”代替了“發動機控制器(Engine Control Unit,ECU)”。
對于ICEV車輛來說,從駕駛意圖的獲取到能源供給,再到能量的轉化,幾乎都是由發動機控制器ECU來完成的。而對于EV來說,類似的功能則由“整車控制單元VCU(Vehicle Control Unit,也稱為電控單元)”來完成。VCU可以被視作電車的動力總成系統的主控單元,負責根據駕駛員意圖、車輛運行狀態以及整車控制策略,經過計算分析然后給各部件發出相應的控制命令,以實現電車的高性能安全行駛。因此也有人把VCU比喻成EV的“小腦”。
電機、電池和電控(也就是俗稱的“三電”系統)構成了電動汽車的整車控制系統。狹義上的電控就是指整車控制器VCU,但是廣義上的電控系統往往指由電機、電池和VCU組成的整車控制系統。
2.整車控制系統
整車控制系統按照執行任務的層級可以分為“決策層”、“協調層”和“執行層”等,這三個層級構成了一個閉環控制系統。決策層由駕駛員構成;整車控制器VCU作為協調層根據車輛實時狀態和決策層的指令對駕駛員的操作目的做出合理判斷;整車控制器VCU將控制指令發送給執行層,由執行層執行相應控制命令。
下圖4-1是一個純電動汽車的典型整車控制系統的結構圖。
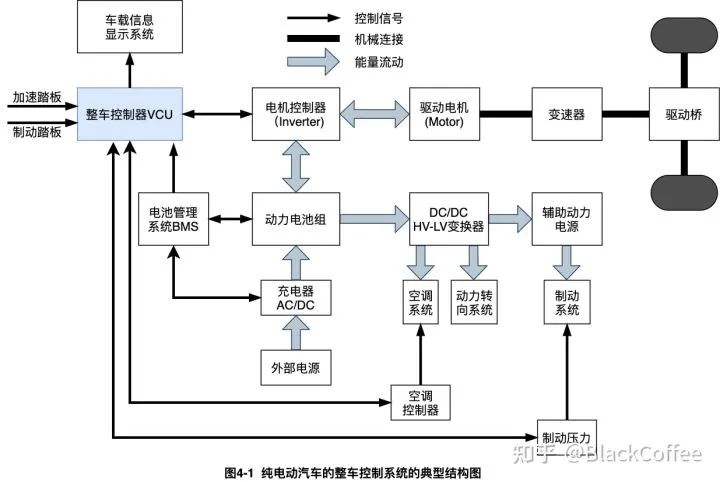
如上圖所示,整車控制系統以電控VCU為核心,通過CAN總線指揮儲能系統、電機系統等關鍵的總成部件執行相應的上下電動作以及扭矩指令,最終完成整車的行駛運行。
整個控制系統也分為低壓部分和高壓部分,并由HV-LV DC/DC變換器完成高壓到低壓的轉換。低壓部分完成車輛控制器供電和信號采集通訊任務;高壓部分通過高壓線束將動力電池的電能傳輸到空調系統、電機等高壓供電設備,實現動力電能的傳輸。
逆變器(Inverter,也即電機控制器),是純電汽車動力性能的決定性部件之一。它從整車控制器獲得整車的扭矩需求,從動力電池包獲得電能,經過自身逆變器的調制,獲得控制電機所需要的電流和電壓,提供給電機,使得電機的轉速和轉矩滿足滿足整車行駛的需求。
2.1整車控制器VCU
VCU是電動汽車的核心部件,車輛的駕駛平順性、能耗經濟性以及運行可靠性等都與VCU息息相關。下圖4-2是從VCU視角抽象的電控系統主要功能示意圖,它獲取駕駛意圖和車輛運行狀態作為輸入信息,匹配駕駛需求,制定合理的功率輸出和能量回收策略,并通過CAN總線或LIN總線將控制命令輸出給其余Powertrain控制器。
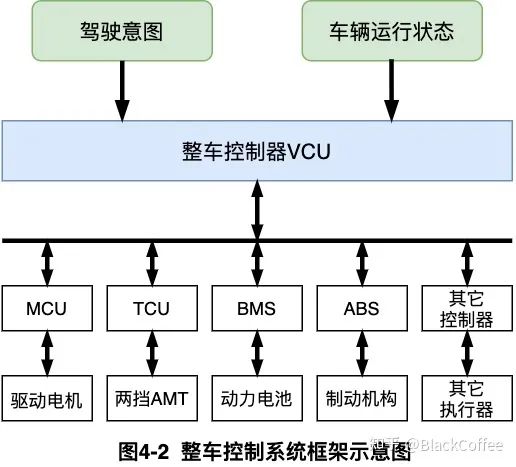
注:上圖中的MCU代表的是Motor Control Unit,指包括逆變器在內的電機控制器單元。TCU代表Transmission Control Unit,指變速器控制單元。
具體而言,VCU通常需要實現以下6個方面的功能:
(1)獲取駕駛意圖和車輛運行狀態:VCU必須能夠采集“油門踏板信號”、“剎車踏板信號”、“檔位手柄位置信號”等模擬量信號來判斷駕駛員或者ADAS系統的駕駛意圖。另外還需要采集“車速信號”、“電機轉速”等頻率信號,以及通過CAN總線采集的其它控制器信號,比如:電機輸出扭矩、變速箱檔位、電池荷電狀態(SOC)等,通過計算和分析得出車輛運行狀態信息。
(2)Powertrain控制:VCU最重要的功能就是根據駕駛員的駕駛意圖和車輛實時狀態,按照設定的控制程序向相應的powertrain子系統發送控制信號,從而控制整車行駛。比如:當駕駛員踩下加速踏板時,VCU向電機控制單元發送電機輸出轉矩信號,電機控制系統控制電機按照駕駛員的意圖輸出扭矩(Torque)。
VCU對扭矩的動態控制是影響整車行駛舒適性的關鍵因素。主要包括模式切換過程中的扭矩協調,以及換擋過程中VCU與自動變速器控制系統(Transmission Control Unit,TCU)之間的協調控制。模式切換過程與換擋過程均為高度瞬態過程,可能引起電機目標扭矩的突變,引起動力系統輸出的動力不平穩。
(3)能量管理策略:VCU采用良好的能量管理策略,提高電池的能量使用效率,對于提升電動汽車的續航里程是至關重要的。能量管理策略包括整車控制、整車能量分配、制動能量回收等方面。
整車控制相關的能量管理策略是指日和合理地分配電機的輸出扭矩,在滿足駕駛員的需求扭矩和整車動力性的前提下,維持電機和電池組的效率在一個良好的范圍內,從而達到高效、節能的目的。
整車能量分配是指對整車各部件使用能量進行優化。純電動汽車有很多用電設備,包括電機和空調設備等。整車控制器可以對能量進行合理分配優化,來提高純電動汽車的續駛里程。例如當動力電池組電量較低時,整車控制器發送控制指令關閉部分起輔助作用的電氣設備,將電能優先保證車輛的安全行駛。
制動能量回收控制:純電動汽車的電機可以工作在再生制動狀態,對制動能量進行回收利用是純電動汽車和傳統能源汽車的重要區別。VCU根據行駛速度、駕駛員制動意圖和電池組狀態進行綜合判斷后,對制動能量回饋進行控制。如果達到回收制動能量的條件,整車控制器向電機控制單元發送控制指令,使電機工作在發電狀態,將部分制動能量儲存在動力電池組中,提高車輛能量利用效率。
(4)整車通訊網絡管理:整車控制器作為整車控制系統的通訊中心節點,負責信息的組織、信息優先權的動態分配和傳輸、網絡狀態的監管及故斷與處理。
(5)車輛狀態檢測與顯示:VCU需要實時監測車輛的各種運行狀態信息,比如:通過 CAN 總線通信獲得車速、電池剩余電量、電機轉速、電流等關鍵的車輛運行數據,并將它們發送給儀表盤顯示系統,便于駕駛員準確掌握車輛整體運行狀況完成相應操作。
(6)故障檢測與診斷:正常情況下,VCU對整車運行狀態進行實時監控。但是當發生故障時,必須及時報警,產生、存儲和發送相應的故障碼,根據故障等級的不同迅速采取相應的安全處理措施,確保車輛安全行駛。除了故障檢測之外,VCU也需要實現故障狀態下的保護功能,也就是按照出現的故障類別對整車進行保護,緊急狀態下才去必要的措施進行安全保護,以防止極端情況的發生。
2.1.1 VCU的硬件組成
VCU硬件由主控芯片以及周邊的時鐘電路、復位電路、預留接口電路和電源模塊等組成最小系統。在最小系統以外,一般還配備數字信號處理電路,模擬信號處理電路,頻率信號處理電路,通訊接口電路(包括CAN通訊接口和RS232通訊接口)。如下圖4-3所示:
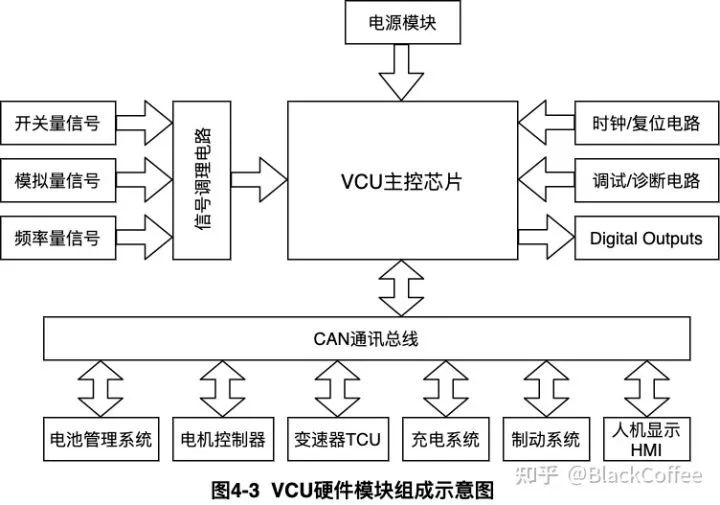
開關信號包括:鑰匙信號、檔位信號、充電開關、制動信號等;
模擬信號包括:加速踏板信號、制動踏板信號、電池電壓信號等;
頻率信號包括:比如車速傳感器的電磁信號,等等。
輸出信號一般用于控制接觸器等部件。
2.1.2 VCU的車輛驅動控制策略
驅動控制策略簡而言之就是在特定的模式下采用最佳的特定轉矩進行合理配置,從而最大限度地省電能,發揮出電動汽車的經濟用性。這是整車控制策略的核心重點。
驅動控制策略將汽車運行模式分為以下幾種,按照不同的運行模式采取不同的驅動控制策略:
1.起步模式:整車控制器在完成對電動汽車的上電自檢后,如果采集到駕駛員加速踏板信號,開始計算電機轉矩,發送扭矩需求給電機控制單元。然后電機控制單元控制電機啟動使電動汽車平穩起步。如果檢測到動力電池組電量低于安全值,發送報警信號提醒駕駛員采取相應措施。
2.正常驅動模式:指車輛處于正常運行狀態,包括加速和倒車等模式。在這個模式下,VCU持續監測哥哥電氣系統的狀態參數(比如:電流、電壓和溫度等),以及車輛自身的行車狀態參數(比如:車速、滑移率等),識別駕駛員意圖,按照加速踏板的開度和開度變化率等,計算所需要的電機驅動扭矩和動力電池的輸出功率等。最后,將這些輸出發送給電機控制器單元等。當駕駛員掛入倒檔時,倒檔信號傳入VCU,車輛進入倒檔模式,此時需要VCU輸出一個扭矩來平穩倒車。
3.制動模式:當制動踏板被踩下后,進入制動模式。VCU分析制動踏板的開度和開度變化率,以及車速和車輛自身的車型參數,來推算所需的制動力矩,然后指揮制動控制器,做出最合理的制動力矩分配方案,以及是否優先啟動ABS主導制動過程等。最終安全有效地實現駕駛員的制動意圖。純電動汽車區別于傳統內燃機動力汽車的主要特點是可以對制動能量進行回收,即在制動過程中采用合理的制動能量回饋控制策略使電機工作在發電狀態,對部分制動能量進行回收利用,提高車載能量利用效率。
4.安全保護模式:保護模式非常重要,VCU需要確保電動汽車在驅動系統出現不同級別故障時采取不同的安全措施,以保證行駛安全。電動汽車在行駛過程中可能出現的故障按照嚴重程度被分成幾個等級:1)故障等級低的,通常給駕駛員提示告警;2)故障等級高的,會強制車輛段時間內停車;比如:系統絕緣故障。3)中間等級的故障,通常會對車輛運行狀態進行限制,但不會強制停車。比如:電池電量SOC低于30%,限速行駛。此時的動力電池系統,已經無法輸出額定功率,而只能以一個較小的功率工作。
5.充電模式:當VCU監測到充電槍與車輛充電插座物理連接確認后,輔助電源上電,相互發送握手報文并完成絕緣檢測。外部充電機與BMS進行參數協商確認。充電機發送充電機最大輸出能力報文給BMS,以確認是否可以以最大能力充電,若不可,則BMS發送電池包的最大接受能力。進入正式充電模式后,在此過程中,充電機和BMS實時互相發送狀態信息,BMS周期性發送需求參數。
充電結束,其判別條件根據BMS的不同設置而有所不同,一般做法,充電最后恒壓階段,電流衰減到一個設定值或者設定的倍率,即認為電池包已經充滿,充電過程可以結束。充電過程中,任何一方發生故障,比如過溫、過流等,充電機都會發出報警,根據故障等級的不同,有的直接終止,有的等待人為處理。
2.2電池管理系統BMS
動力電池包是電動汽車唯一的動力來源。對電池組進行有效管理是電動汽車整車能量管理的核心。電池管理系統(BMS)是整車控制系統中負責進行電池管理的控制單元,因此也是整車能量管理系統的重要組成部分。VCU通過CAN總線與BMS進行通訊,實施對動力電池組的有效控制;另一方面也通過CAN總線從BMS中獲取動力電池組的當前狀態信息,為整車的能量控制策略提供基準參考。
一個“動力電池包(Battery PACK)”通常由幾個“電池模塊(Battery Module)”組成。電池模塊也簡稱為“模組”,我們通常把多個“電芯(Battery Cell)”用同一個外殼框架封裝在一起,通過統一的邊界與外部進行聯系時,這就組成了一個模組。“電芯(Battery Cell)”是動力電池的最小單位,也是電能存儲單元。如下圖4-4所示:

圖4-4 動力電池的“電芯-模組-電池包”的組成關系
BMS系統通常由電池控制器單元(Battery Control Unit,BCU)和電池管理單元(Battery Management Unit,BMU)組成。電池模組中的BMU主要任務包括:負責采樣模組中的電芯的電壓,執行電芯的電壓平衡,采樣和管理電芯的溫度,通過CAN總線跟外部其余相關單元進行通訊等。而BCU的主要任務包括:測量電池包的總電壓、總電流和絕緣狀態等,管理充電和放電,評估電池荷電狀態SOC/SOH/SOP值,此外它也是VCU與電池包之間的通訊中介橋梁。如下圖4-5所示:
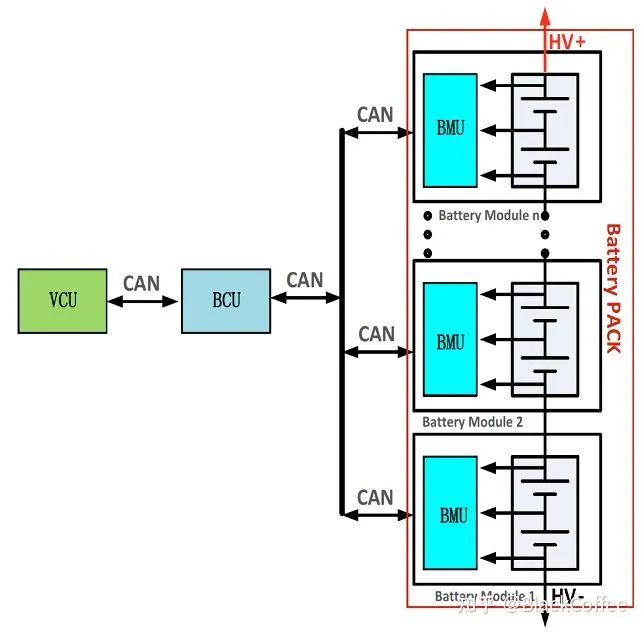
圖4-5 VCU與BMS系統
BMS需要實現的主要功能包括以下幾點:
對電池信息進行采集:準確采集電池包的總電流、總電壓、最高單體電壓、最高溫度、電池包荷電狀態SOC(State Of Charge),以及電池包荷電健康狀態SOH(State Of Health)等參數數據。并將電池包的這些信息通過CAN總線通信網絡發送給整車控制器VCU。
進行電池SOC估算。整車控制器VCU在進行整車能量管理時,必須考慮動力電池包的狀態。電池剩余電量SOC是衡量電池狀態的重要指標,表示電池當前剩余電量與額定電量的比值。如何根據電池的端電壓,充放電電流,內阻等參數對電池剩余容量進行估計是電池管理系統研究的關鍵問題之一。
對電池包進行充放電控制:對電池包進行充放電控制對于保證電池包安全工作,防止電池過度充放電有著重要意義。整車控制器通過對電池管理系統的控制實現電池的充放電轉換。
對電池包進行均衡控制:動力電池包里不同電芯單體間的不一致性是固有的,為了延長電池的使用壽命,電池管理系統需要提供均衡措施盡量減小單體電池之間的差異。對動力電池包進行均衡控制對提高電池使用壽命有著重要意義。
故障診斷及處理:動力電池包的運行環境非常惡劣復雜,一旦出現故障必然會導致電池性能的下降,情況嚴重會導致電池報廢甚至爆炸。因此,電池管理系統必須具備及時預防故障和及時處理故障的能力。動力電池包可能出現的故障主要有:過充、過放、過溫、過流、容量過高、容量過低等。電池管理系統的故障診斷及處理是實現電池組安全工作的重要保障。
2.3電機控制器
電機控制器(Motor Control Unit,MCU)和驅動電機共同組成了電機系統。電機控制器接收來整車控制器VCU的需求扭矩和目標車速等信息,然后通過里面的單片機控制IGBT 模塊進行動態扭矩矢量控制,以控制電機將電池包的電能轉化成機械能。
電機控制器主要由中央控制模塊、功率模塊、驅動控制模塊以及各種傳感器等組成。
中央控制模塊包括:PWM波生成電路、復位電路、傳感器信號處理電路、交互電路等。中央控制模塊的兩大功能:1)對外,通過IO接口獲取整車上其他部件的指令和狀態信息。對內,把翻譯過的指令傳遞給逆變器驅動電路,并檢測控制效果。
功率模塊:電機控制器的主體是“逆變器(Inverter)”。逆變器對電機電流電壓進行控制。經常選用的功率器件主要有MOSFET或者IGBT等。
驅動控制模塊:它的作用是將中央控制模塊的指令轉換成對逆變器中可控硅的通斷指令,并作為保護裝置,具備過壓、過流等故障的監測保護功能。
傳感器:包括電流傳感器、電壓傳感器、溫度傳感器、電機轉軸角位置傳感器等。
3.整車控制域的芯片方案
整車控制域的芯片主要是以各種MCU芯片為主,強調低功耗設計、控制實時性以及ASIL-D等級的功能安全等特性,軟件上則主要以AutoSAR CP平臺為主。傳統汽車電子廠商(包括瑞薩、TI、NXP和Infineon等)都有豐富的針對整車控制器的MCU芯片方案。這里介紹一下NXP的S32系列MCU芯片。
3.1 S32K3系列MCU芯片
NXP S32K3是基于ARM Cortex-M7內核所打造的、可支持ASIL-D級別功能安全的系列家族MCU芯片產品。它的設計應用場景包括:電機控制器、車身控制器、BMS等整車控制域中各種控制器單元。S32K3強調芯片架構的伸縮性,支持單核、雙核和鎖步(Lockstep)核等不同內核配置,以靈活適應各種不同場景的需求。
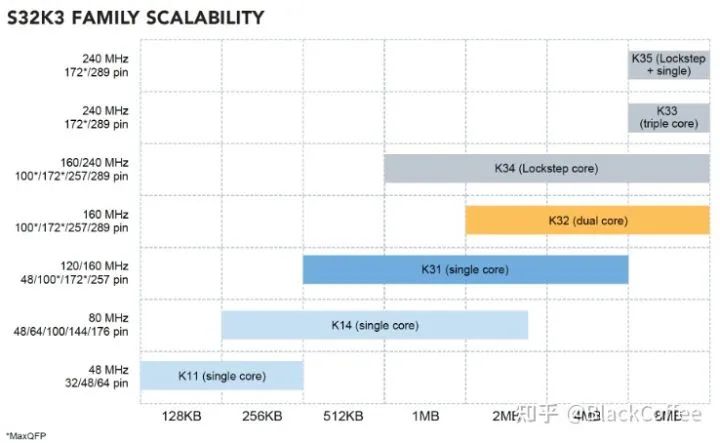
圖4-6 NXP S32K3家族MCU
下面是S32K3 MCU的芯片特性:
(一)可伸縮的MCU平臺:
ARM Cortex-M7內核,120-240 MHz運行頻率,支持Lockstep模式。
512KB到8MB大小的Flash存儲,支持ECC
FOTA支持:A/B模式的固件升級機制,支持回滾機制
低功耗的運行與Standby模式,快速喚醒功能,時鐘與電源門控設計
BGA和MaxQFP封裝,48-289 pin角。相比于標準的QFP封裝,新的MaxQFP封裝可以大大減小封裝footprint。
AEC-Q100可靠性認證:Grade 1 (-40 °C 到 +125 °C) 和Grade 2 (-40 °C to +105 °C)
(二)Safety、Security和外設接口特性:
ISO 26262功能安全:最高可支持到ASIL-D級別
失效收集和控制單元(Fault Collection and Control Unit, FCCU)
硬件Watchdog,軟件Watchdog計時器,時鐘/電源/溫度監控機制。
NXP SafeAssure支持
硬件Security引擎(HSE):ASE-128/192/256,RSA和ECC加密,Secure Boot,密鑰導入和存儲,側信道保護機制,ISO 21434等。
TSN以太網、I3C、CAN-FD、FlexIO(SPI/IIC/IIS等)、QSPI接口和串行Audio接口
專用的電機控制外設接口:enhanced Modular IO Subsystem(eMIOS), Logic Control Unit (LCU), TRGMUX, Body Cross-triggering Unit (BCTU), Analog to Digital Converter (ADC), and Analog Comparator (CMP)
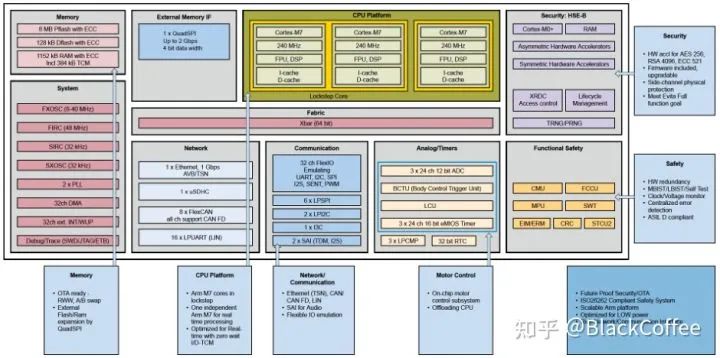
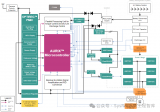
圖4-7 S32K3xx MCU Block Diagram
NXP也提供了完整的軟件解決方案,可以極大降低客戶開發車載控制器產品的難度,縮短產品開發周期。下圖4-7是NXP S32K3的軟件棧:
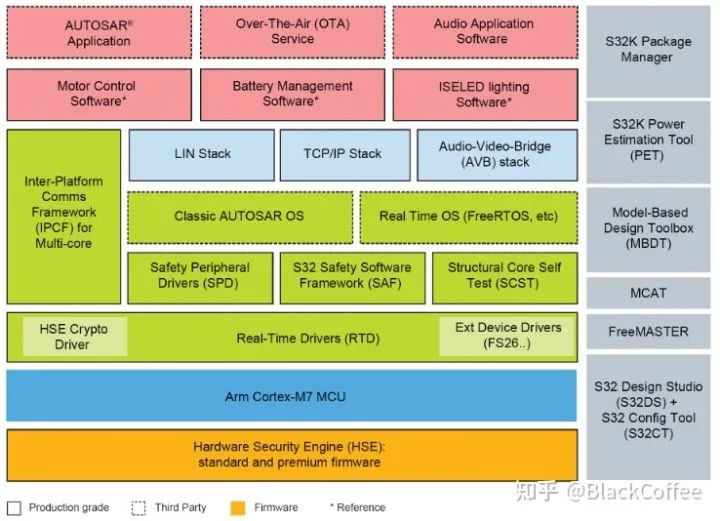
圖4-8 S32K3xx MCU解決方案的軟件棧
(一) 軟件解決方案中的標準軟件部分(產品級質量保證,且無需額外付費)包括:
HSE固件:標準版本的HSE Firmware是可以升級的
Real-Time Drivers(RTD):覆蓋所有MCU外設IP的實時驅動程序,ISO 26262 ASIL-D兼容,AutoSAR 4.4規范兼容。可以通過NXP S32的配置工具等進行配置。
Safety Peripheral Drivers:跟S32K3芯片中的硬件功能安全特性相關的驅動程序,包括:BIST管理器、擴展MCU錯誤管理器(eMcem)等。
IPC框架:核間通信和資源共享的Framework。比如:AutoSAR CP系統和非AutoSAR的RTOS軟件之間,可以使用這一套基于共享內存的IPC框架來進行快速通信。
(二) 需要付費購買商業License的軟件包括:
安全軟件框架(Safety Software Framework,SAF):主要包括支持失效檢測的庫程序,以及芯片啟動時、運行時的單點失效處理和失效恢復程序庫。基于SAF,用戶更加便于開發滿足既定功能安全目標的軟件功能。
結構化的核心自檢程序庫(Structural Core Self-Test Library):用于在運行時檢測處理器核心中永久的硬件失效,可以高達90%的診斷覆蓋率。
HSE固件:OEM特定的定制版HSE固件
AMMCLIB(Automotive Math and Motor Control Library):NXP專利的、用于各種電機控制的算法數學庫。這是車規級軟件(SPICE Level 3和CMMI軟件流程認證),包含MATLAB/Simulink模型以及相應的C代碼庫程序。
BMS系統中的安全程序庫:包含在BMS的參考設計中。
總結一下NXP S32K3系列MCU產品的競爭優勢:
1.優秀的可伸縮MCU平臺:基于ARM Cortex-M系列內核,從單核、多核以及鎖步核模式的配置,ASIL-D功能安全,以及低功耗設計。
2.面向未來的芯片特性:HSE支持對稱以及非對稱加密算法,安全啟動,密鑰管理等。
3.完整的軟件SDK:SDK中內置免費的、車規級的基礎系統軟件,面向領域的上層應用軟件參考設計,豐富的開發工具和專業的電機控制數學庫算法等。
3.2 S32S系列微處理器
NXP S32S24和S32S247系列安全微控制器和微處理器,針對電動汽車中需要高安全可靠的車輛動力域控制器系統(Vehicle Dynamics Control System)和安全協處理器應用場景,支持最高等級的ASIL-D功能安全級別:
需要ASIL-D級別安全容錯功能的車輛動力系統應用,比如:制動控制器、轉向控制器和電機控制器等。
需要出色的性能、ASIL-D安全等級和存儲能力的HEV/EV電控域控制器應用場景,以應對多種能力源的復雜能源管理問題。
高性能的安全協處理器,可用作主雷達、視覺和傳感器融合處理器的安全檢測器。
下圖4-9是S32S系列處理器的功能模塊圖:
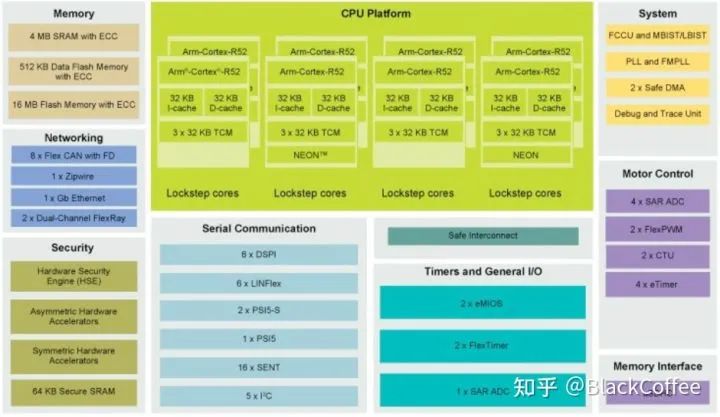
圖4-9 S32S系列處理器的功能模塊圖
下面是S32S處理器的一些關鍵特性:
滿足汽車可靠性和ISO 26262 ASIL-D功能安全的芯片設計。
總共8個基于ARM v8架構的Cortex-R52實時安全內核,支持雙核鎖步模式,其中4個核帶有ARM NEON SIMD指令支持。最高運行頻率可到800MHz,CPU算力最大可高達6K+ DMIPS。
大容量集成Flash閃存:至少為16MB,最大可達64MB
先進的Flash閃存更新功能:即時(On-the-Fly)無線(Over-the-Air)閃存更新功能,將處理器停機時間將為零。
基于ARM Cortex-R52內核的Hypervisor虛擬化支持:通過Hypervisor實現硬件資源的分區隔離,確保多個用戶應用程序互相不影響。
功能安全:高級芯片失效檢測與恢復機制,可以幫助用戶檢測、隔離和處理芯片失效,而無需系統停機。
硬件安全引擎HSE:用戶可編程的HSE支持各種基于公鑰和私鑰的加密算法,旨在保護免于各種惡意的黑客網絡攻擊。
AEC-Q100 Grade 1:-40 °C 到 +150 °C溫度范圍
基于NXP S32S系列安全微處理器,用戶可以開發出集成度更高、更加智能的汽車動力域控制器產品。
4.整車控制系統的發展趨勢
當前汽車EE架構的發展趨勢是從分布式ECU架構演進到域集中式架構。目前正在量產或即將量產的車型大部分都是基于域集中式EEA。特斯拉已經率先發展到“中央計算+區域”的EE架構,根據預測2025年后,國內大部分主機廠也將開始演進到中央計算+區域EE架構。部分領先的廠商明后年就會有基于“中央計算+區域”EE架構的車型量產落地。
正如圖4-1所顯示,經典的動力總成系統通常包含了“驅動電機”、“電機控制器”、“減速器”、“車載充電器”、“直流變換器”、“配電箱”、“整車控制器VCU”和“電池管理器”等八大部件。顯然,相較于座艙域和自動駕駛域,整車控制域顯得更為分散、集成度更低。在當前汽車域集中式EE架構的發展趨勢下,整車控制系統朝著“集成化”和“域控化”演進是兩大主流發展趨勢。
(一)集成化
從最早的驅動電機、變速器和電機控制器“三合一”開始,這兩年國內主機廠和動力總成Tier 1供應商陸續推出了集成化程度更高的“多合一”動力總成系統。集成化程度更高的好處是顯而易見的,比如:可以大大減小電驅動系統的體積,降低系統的總重量;集成度更高也意味著降低生產成本;此外減重也可以反過來增加xEV的續航里程。
2021年9月在比亞迪最新發布的E平臺3.0中,很重要的一個亮點就是動力總成部件的“八合一”集成化,將傳統的八大部件深度融合集成到了一起。如下圖4-10。高度集成化使得整體體積可以降低20%,重量減輕15%左右。
2021年7月,長安汽車發布第二代電驅動一體化系統,集成了整車控制器(VCU)、高壓分線盒、電機控制器、直流變換器、充電機、電機、減速器七個部件,在綜合性能方面較第一代的“三合一”(集成電機、電控、減速器)系統有顯著的提升,體積減少5%、重量降低10%、功率密度提升37%、效率提升5%。
(二)域控化
電驅動力系統的多合一集成化也帶動了動力總成系統中原本分散的控制器單元朝著集中式的域控制器融合發展。性能更強勁的域控制器促進了從模塊到系統的融合、再進一步到整體方案的融合。
比如比亞迪E平臺3.0中的智能動力域控制器,將原來的VCU、BMS、電機控制器以及DC/DC和AC/DC的控制部分都集成到了動力域控制器平臺上。
從目前國內外相關論文來看,以原有的VCU為基礎,升級為成一個性能更強勁的汽車動力域控制器(Vehicle Dynamics Controller)平臺,然后整合BMS、電機控制器、DC/DC和AC/DC相關的軟硬件功能是一個趨勢。如下圖4-12所示,其中紫色的虛線箭頭表示原來由單個ECU控制器實現的相應功能向性能更強勁的動力域控制器上遷移。
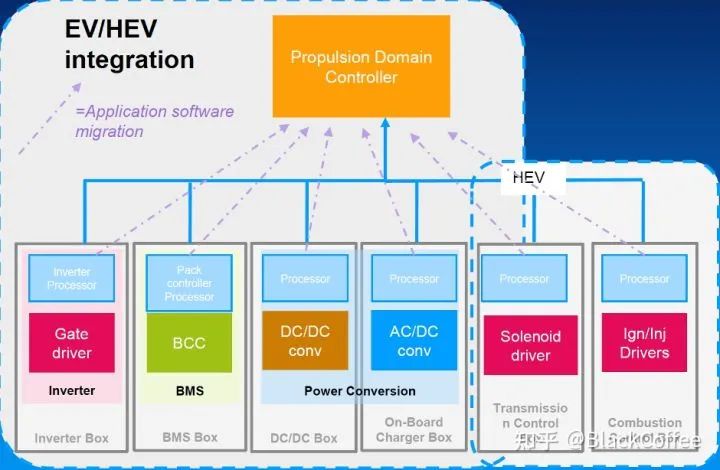
圖4-12 原有控制器上的應用軟件往動力域控制器上遷移與集成
在這種發展趨勢下,原來最高頻率不超過200MHz的MCU芯片顯然不能提供動力域控制器所需的性能。也正因如此,NXP即將發布基于最新的Cortex-R52內核、運行頻率可高達800MHz的S32S系列安全微處理器。S32S安全微處理器基于ARM-v8架構的R52內核還支持虛擬化技術,通過Hypervisor還能對集成到同一個平臺上的不同應用軟件做很好的隔離,以確保系統的安全可靠性。下圖4-13是NXP最新發布的車規MCU產品線的路線圖,可以看到面向應用復雜度越來越高的汽車動力域控制器場景,NXP將推出性能更強勁的MCU產品。
有了更高性能的動力域控制器平臺,我們就可能嘗試更復雜的模型預測控制算法,從而可以讓VCU對需求扭矩做更好的控制,對動力電池能量的使用做更好的管理,提升電車的續航里程。
新能源汽車市場已經進入到市場爆發的拐點,同時也進入到后補貼的時代。作為核心部件的電驅動力系統在整車成本、架乘體驗、汽車安全、續航里程等方面起決定性因素,將是各大主機廠和Tier 1廠商研發投入的重點方向。
審核編輯:郭婷
-
電動汽車
+關注
關注
156文章
12422瀏覽量
234582 -
芯片
+關注
關注
459文章
52494瀏覽量
440691 -
控制系統
+關注
關注
41文章
6780瀏覽量
112157
原文標題:整車控制域及芯片方案解析
文章出處:【微信號:汽車電子嵌入式,微信公眾號:汽車電子嵌入式】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
芯森電流傳感器在電動汽車與充電系統的應用案例

無刷直流電機電動汽車再生ABS雙閉環控制研究
電裝公司推出全新電動車輛充電控制系統「EVECOM」
輪轂電機驅動電動汽車垂向動力學控制研究綜述
雙電機電動汽車驅動防滑控制
免費領取基于 DSP的直流無刷電機控制系統探究
歐洲純電動汽車2024年銷量出爐
電動汽車驅動系統的控制器硬件架構
電動汽車動力系統中IGBT全面解析

英國超越德國,成2024年歐洲最大純電動汽車市場
電動汽車充電系統設計與運營平臺方案探究
電動汽車充電樁系統方案設計
直流快速電動汽車充電器的設計技巧與解決方案





 工商網監
工商網監
評論