") 通過接觸位置確定后續(xù)坐標(biāo)位置
通過接觸位置確定后續(xù)坐標(biāo)位置
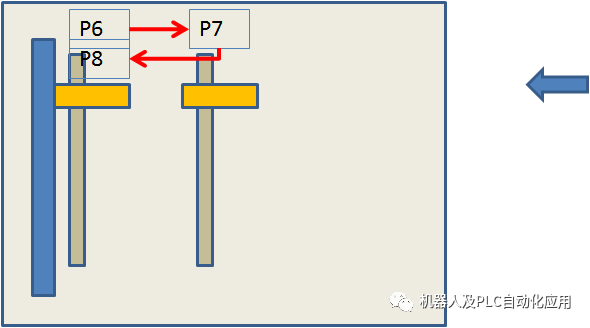
LIN SUCHEN VB=350[mm/s] RobWzg=1Base=26 Fern=M28 Vred=10% Nah=M29 P
大眾標(biāo)注特有的軌跡搜索程序
5: Tech_ BaseverschiebungSuchlauf Base 31 setzen - - - xyz-MaxWeg:- Nahsensor=M29 EIN
當(dāng)M29被觸發(fā)后當(dāng)前位置被報存為BASE31,從而后續(xù)使用BASE31的軌跡點的軌跡點實現(xiàn)偏移.
接觸工件位置M29
LIN VB=700[mm/s] VE=0% ACC=100% RobWzg=20 Base=31 SPSTrig=5[1/100s]P
返回測量位置
LIN VB=400[mm/s] VE=0% ACC=100% RobWzg=31 Base=31 SPSTrig=5[1/100s]P
抓件位置
Tech_Baseverschiebung Suchlauf Base 31 setzen- - - xyz-MaxWeg:- Nahsensor=M29 EIN
VW_USER (#USR_ADV,105,11,0,0,0,0,29,TRUE)
------------------ADC------------------------
CASE 105 ;上級組0, 下級組5 提前執(zhí)行
Sensor fuer Dehnfuge 傳感器的伸縮縫
IF(PAR7==TRUE)THEN
SWITCH PAR1
CASE 1當(dāng)P1設(shè)置為1時當(dāng)前位置的BASE坐標(biāo)村到BASE31里(這里我們不使用).
CONTINUE
Base_Data[31] = BASE_DATA[VW_MPARA_ACT.BASE_NO]
.................
CASE 11
CONTINUE
WHILE ($CYCFLAG[PAR6]==TRUE)M(P6)
MLD(22,#QuitMsg) ;搜索運(yùn)行接近傳感器故障
ENDWHILE
;ENDFOLD
-----------------------MAIN--------------
CASE 105 ; 上級組0,下級組5 在軌跡當(dāng)前步 執(zhí)行
設(shè)置搜索運(yùn)行基數(shù)
IF(PAR7==TRUE)THEN
SWITCH PAR1
CASE 1;只在于執(zhí)行里執(zhí)行
CASE 11; ---------成功搜索后設(shè)置基數(shù)
CONTINUE
WHILE(VW_MPARA_ACT.BASE_NO<1) 當(dāng)使用的BASE號不能是0
MLD(18,#QuitMsg); 如果是0提示BASE值不正確
ENDWHILE
IF $FLAG[Fehler_Suchlauf]==TRUE THEN F533開啟搜索指令
MLD(16,#QuitMsg);沒有提示信息
ENDIF
--------如果坐標(biāo)號是31的話---------------
IF(BASE_TYPE[VW_MPARA_ACT.BASE_NO]==#BASE)THEN當(dāng)前BASE的類型是#BASE
CONTINUE
$BASE=$NULLFRAME-------坐標(biāo)值零----------
$BASE=$pos_act 當(dāng)前坐標(biāo)保存位BASE坐標(biāo)值
BASE_DATA[31]=$BASE 保存在BASE31里
IF NOT $EXT THEN 不是外部自動會有提示信息,,并停止程序
MeldNr(4) ;這樣的,新基坐標(biāo)已定
HALT
ENDIF
ENDIF
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2562文章
52524瀏覽量
763501 -
坐標(biāo)
+關(guān)注
關(guān)注
1文章
17瀏覽量
21556
原文標(biāo)題:通過接觸位置確定后續(xù)坐標(biāo)位置
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機(jī)器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
時源芯微 近場探頭確定干擾源的位置
轉(zhuǎn)子位置傳感器之霍爾磁敏傳感器介紹(可下載)
三坐標(biāo)測量機(jī)的機(jī)器坐標(biāo)系和原點介紹

位置傳感器的類型和用途是什么?
關(guān)于三坐標(biāo)測量機(jī)的常見問題及回答
光路元件的位置和方向
凸輪軸位置傳感器的工作原理 如何測試凸輪軸位置傳感器
圖中藍(lán)線框住的S6的引腳1在哪個位置,后續(xù)引腳2-12是如何排列的?
位置傳感器的類型和用途是什么
HarmonyOS NEXT應(yīng)用元服務(wù)開發(fā)控件位置調(diào)整場景與重新設(shè)置新焦點位置的場景
pcb設(shè)計中如何設(shè)置坐標(biāo)原點
光路元件的位置和方向
cmm三坐標(biāo)測量儀精準(zhǔn)掌握形狀與位置公差





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論