 【飛凌RZ/G2L開發板試用體驗】SSH登錄核心參數測試,PWM驅動編碼器電機
【飛凌RZ/G2L開發板試用體驗】SSH登錄核心參數測試,PWM驅動編碼器電機
本文來源電子發燒友社區,作者:馬猛, 帖子地址:https://bbs.elecfans.com/jishu_2309828_1_1.html?
SSH登錄首先設定板子的IP地址,OK-G2LD-C開發板支持 SSH 服務并啟動時已自動開啟,設置好 IP 地址后就可以作為一臺SSH 服務器。可以利用 SSH 登錄開發板進行開發調試,也可用 scp 進行文件傳輸。
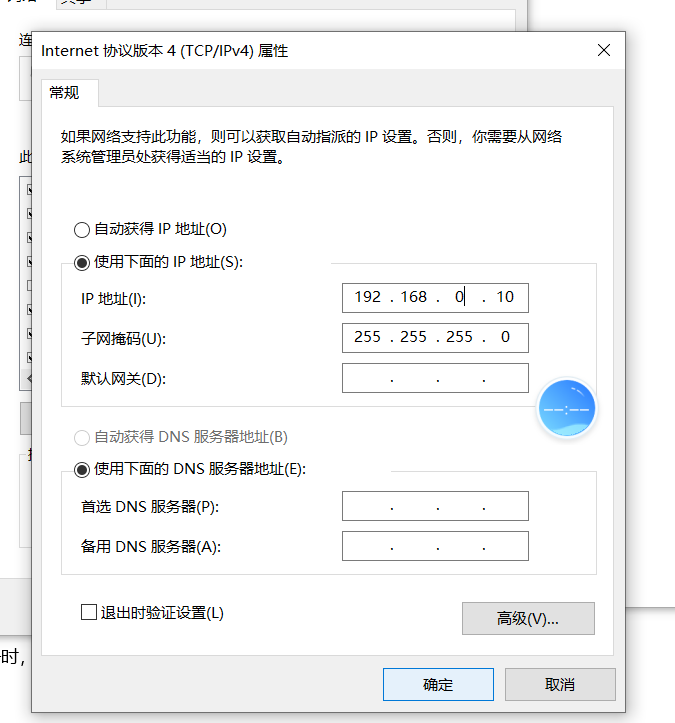
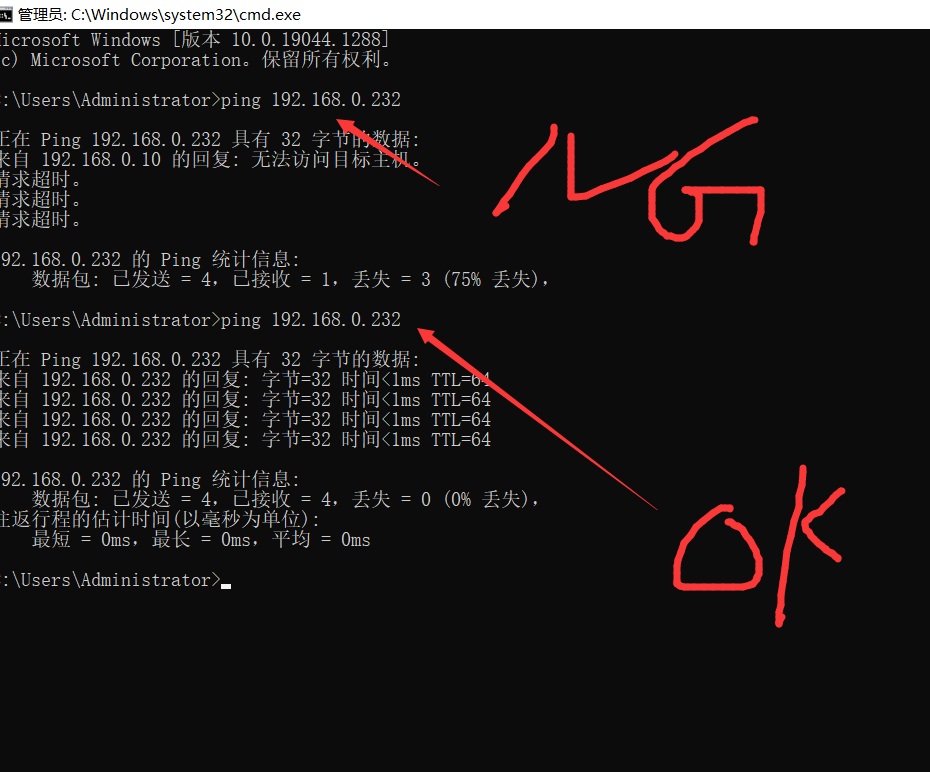
開發板有兩個網口ENT0,ENT1:不要搞混了,首先和電腦ping .
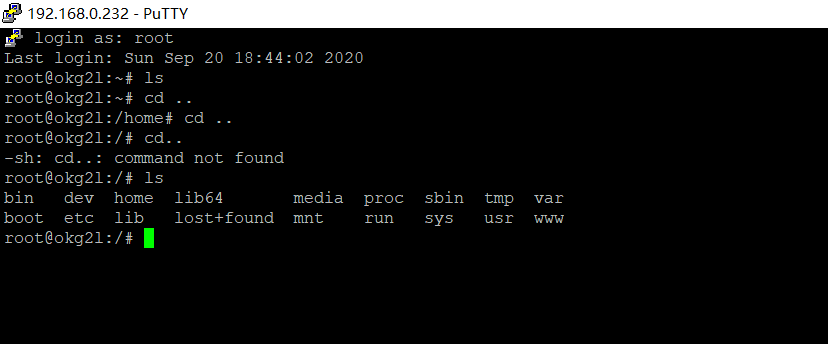
查看linux根目錄
1LED測試:
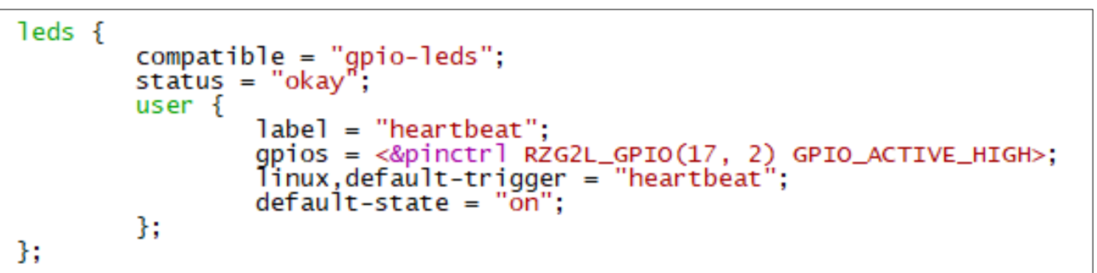
1) OK-G2LD-C 核心板有 1 個藍色可控 LED 燈,板卡上電啟動后該藍色 LED 燈閃爍。若用戶關閉該功
能, 需要修改源碼中的設備樹文件: OKG2L-linux-sdk10/OKG2L-linux-kernel/arch/ARM64/boot/dts/renes
as/OKG2L-C.dtsi,將 leds 節點屬性 state=”on”改為”off”, linux,default-trigger = "heartbeat"改為”none”
2)LED : 用戶控制
當將 led 的觸發條件設置為 none 后,用戶可以通過命令來控制 led 燈亮滅。
復制代碼
3)將藍色 LED 燈改為心跳燈
復制代碼
2GPIO PWM測試
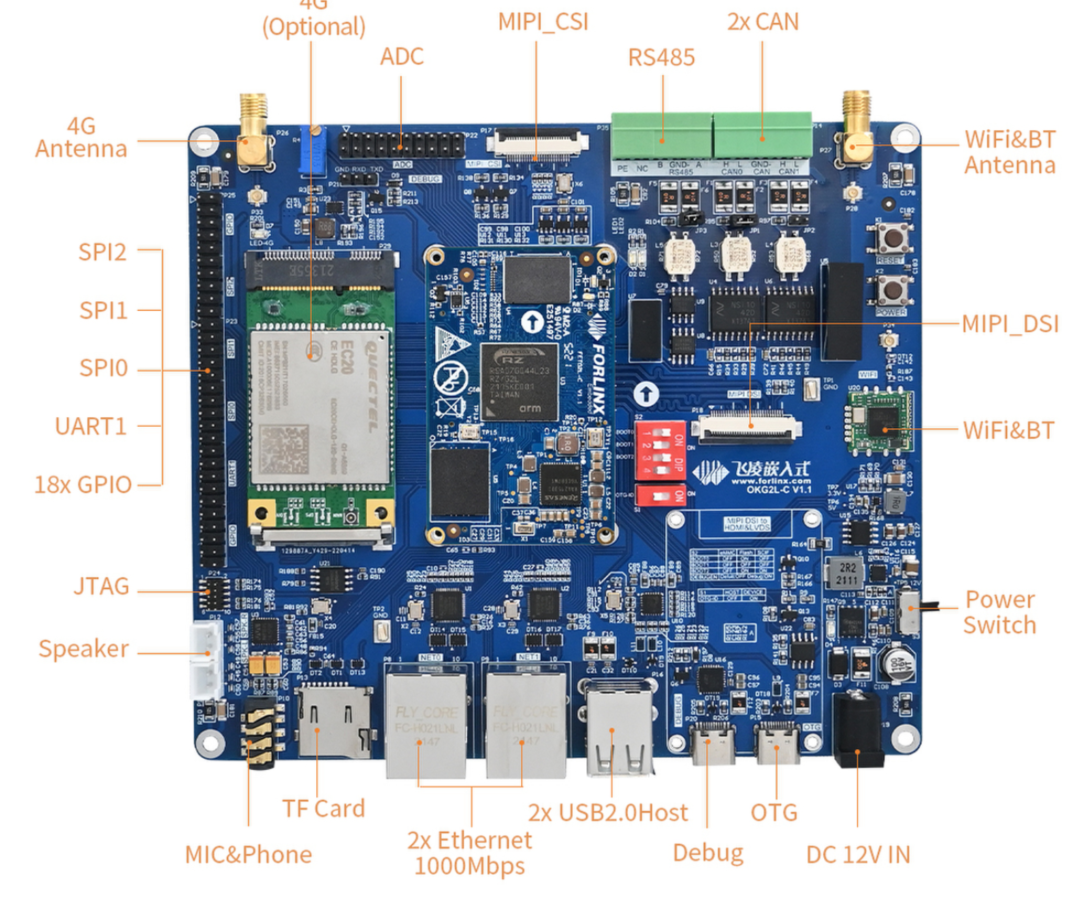
OK-G2LD-C 底板在 P23 ,P25 引出 gpio, 根據原理圖標識的引腳名稱,使用 sysfs 方式控制 gpio,設
置 gpio 輸出電平高低。 (此原理圖對應底板的 P25 絲印, 1 腳對應底板絲印小三角)
gpio 編號計算方式: GPIO_ID = GPIO_port * 8 + GPIO_pin + 120
例如引腳 P17_1 對應的 gpio 編號為 17*8+1+120=257;
目的:將一個小舵機直接連接到開發板的5伏電源上,并使用GPIO數字輸出端口采用軟件PWM的方式來控制它。警告:只能使用微型舵機(如:SG90),因為開發板5 V供電的限制,大型號的舵機電流過大對控制板安全不利。
連接舵機的棕色線(或黑色線)至開發板的 GND (pin #6), 舵機紅色線至開發板的 5 V (pin #2),舵機黃色線連接至開發板的任意 GPIO 輸出端口. 此時舵機由開發板的 5 V供電, GPIO的控制電壓是 3.3 V。(開發板引腳可參見:開發板的外部I/O接口)當然我們也可以使用充電寶給舵機供電。
復制代碼
SSH登錄首先設定板子的IP地址,OK-G2LD-C開發板支持 SSH 服務并啟動時已自動開啟,設置好 IP 地址后就可以作為一臺SSH 服務器。可以利用 SSH 登錄開發板進行開發調試,也可用 scp 進行文件傳輸。
開發板有兩個網口ENT0,ENT1:不要搞混了,首先和電腦ping .
查看linux根目錄
1LED測試:
1) OK-G2LD-C 核心板有 1 個藍色可控 LED 燈,板卡上電啟動后該藍色 LED 燈閃爍。若用戶關閉該功
能, 需要修改源碼中的設備樹文件: OKG2L-linux-sdk10/OKG2L-linux-kernel/arch/ARM64/boot/dts/renes
as/OKG2L-C.dtsi,將 leds 節點屬性 state=”on”改為”off”, linux,default-trigger = "heartbeat"改為”none”
2)LED : 用戶控制
當將 led 的觸發條件設置為 none 后,用戶可以通過命令來控制 led 燈亮滅。
- root@okg2l:/# echo none > /sys/class/leds/heartbeat/trigger //設置觸發條件為 none
- root@okg2l:/# echo 1 > /sys/class/leds/heartbeat/brightness //點亮 led 燈
- root@okg2l:/# echo 0 > /sys/class/leds/heartbeat/brightness //熄滅 led 燈
3)將藍色 LED 燈改為心跳燈
- echo heartbeat > /sys/class/leds/heartbeat/trigger //設置觸發條件為 heartbeat
2GPIO PWM測試
OK-G2LD-C 底板在 P23 ,P25 引出 gpio, 根據原理圖標識的引腳名稱,使用 sysfs 方式控制 gpio,設
置 gpio 輸出電平高低。 (此原理圖對應底板的 P25 絲印, 1 腳對應底板絲印小三角)
gpio 編號計算方式: GPIO_ID = GPIO_port * 8 + GPIO_pin + 120
例如引腳 P17_1 對應的 gpio 編號為 17*8+1+120=257;
目的:將一個小舵機直接連接到開發板的5伏電源上,并使用GPIO數字輸出端口采用軟件PWM的方式來控制它。警告:只能使用微型舵機(如:SG90),因為開發板5 V供電的限制,大型號的舵機電流過大對控制板安全不利。
連接舵機的棕色線(或黑色線)至開發板的 GND (pin #6), 舵機紅色線至開發板的 5 V (pin #2),舵機黃色線連接至開發板的任意 GPIO 輸出端口. 此時舵機由開發板的 5 V供電, GPIO的控制電壓是 3.3 V。(開發板引腳可參見:開發板的外部I/O接口)當然我們也可以使用充電寶給舵機供電。
- # Software PWM Servo.py
- import RPi.GPIO as GPIO
- importtime
- P_SERVO = 22 # GPIO端口號,根據實際修改
- fPWM = 50# Hz (軟件PWM方式,頻率不能設置過高)
- a = 10
- b = 2
- def setup():
- global pwm
- GPIO.setmode(GPIO.BOARD)
- GPIO.setup(P_SERVO, GPIO.OUT)
- pwm = GPIO.PWM(P_SERVO, fPWM)
- pwm.start(0)
- def setDirection(direction):
- duty = a / 180 * direction + b
- pwm.ChangeDutyCycle(duty)
- print "direction =", direction, "-> duty =", duty
- time.sleep(1)
- print "starting"
- setup()
- for direction in range(0, 181, 10):
- setDirection(direction)
- direction = 0
- setDirection(0)
- GPIO.cleanup()
- print "done"
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
飛凌
+關注
關注
0文章
135瀏覽量
16403 -
開發板試用
+關注
關注
3文章
301瀏覽量
2337
發布評論請先 登錄
相關推薦
熱點推薦
【米爾-全志T536開發板試用體驗】- 連接電腦通訊與操作測試
本地文件以及板上文件系統,則說明ssh文件傳輸已建立。
總結
通過連接開發板的調試串口,到了解系統重要指標參數,以及設置網絡和配置遠程登錄
發表于 06-10 11:11

瑞薩RZ T2M與RZ T2L微控制器的編碼器接口使用有何差異
RZ T2M和RZ T2L兩款芯片在編碼器接口的硬件實現上有所差異。不少客戶關注到這個差異之后,比較關心二者在

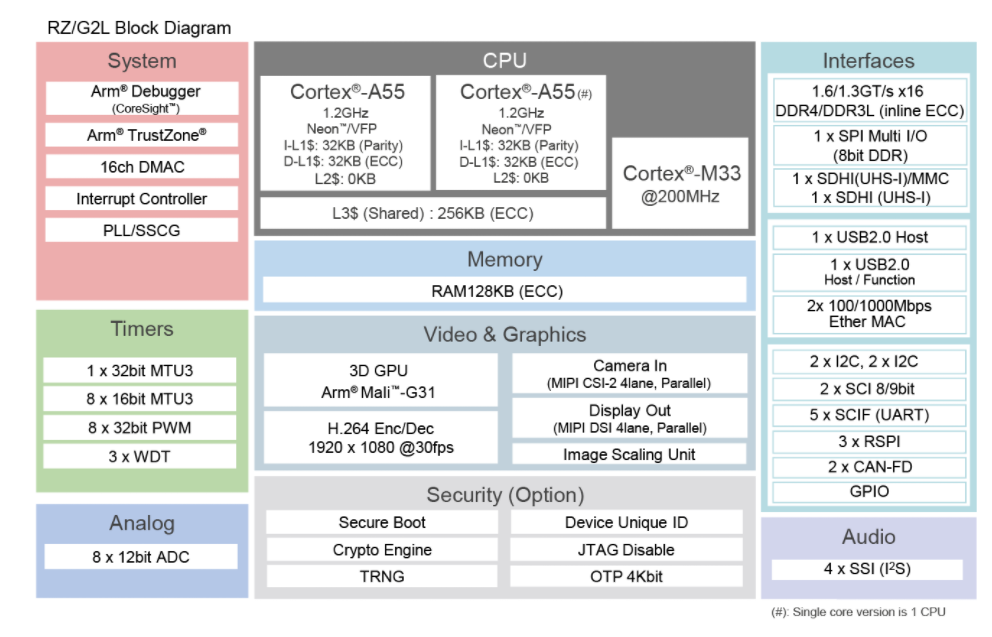
具有3D圖形和視頻編解碼器的通用 MPU RZ/G2L 數據手冊
RZ/G2L 微處理器配備 Cortex-A55?(1.2GHz)CPU、16 位 DDR3L/DDR4 接口、使用 Arm? Mali-G
【ELF 2學習板試用】ELF2開發板開箱體驗及基本使用環境搭建
ELF2開發板(飛凌嵌入式)
開箱包裹內容
? ?打開包裝,你可以看到以下物品
一個綠聯的usb3.0讀卡器、sandisk的32
發表于 01-19 22:41
【飛凌嵌入式OK3588J-C開發板體驗】OK3588J-C開發板開箱、系統燒寫及環境測試
是萬分感激!
開箱后,可以看到上面核心板和開發板是可以分開的,核心板上貼有非常大的散熱器,可以保證熱量的揮發,我在實際運行的時候摸上去也不是特別的糖,左面是電源DC接口,兩個千兆網絡
發表于 12-26 18:35
飛凌嵌入式受邀亮相瑞薩2024工業技術研討會
飛凌嵌入式作為瑞薩電子的生態合作伙伴,給2024瑞薩電子MCU/MPU工業技術研討會的現場觀眾帶去了基于RZ/G2L高性能多核異構處理器設計

瑞薩RZ/G2L微處理器的SD卡GPIO控制功能介紹
RZ/G2L微處理器配備Cortex-A55(1.2 GHz) CPU、16位DDR3L/DDR4接口、帶Arm Mali-G31的3D圖形

RZ/G2L高速虛擬串口方案 基于瑞薩RZ/G2L SMARC開發板的虛擬(Virtual UART)實現方案
RZ/G2L具有豐富的外設,比如千兆以太網,CANFD以及豐富的UART接口,可以滿足工業數據收集處理相關的應用。本文主要介紹基于瑞薩RZ/G2L SMARC
發表于 11-20 14:41
?917次閱讀

【龍芯2K0300蜂鳥板試用】UART通信測試2、ssh連接
2、ssh連接
為方便后續測試,使用網線連接開發板,采用ssh進行通信。
系統默認使用 dropbear 作為
發表于 09-20 00:28
【龍芯2K0300蜂鳥板試用】-03-網絡接口測試以及SSH登錄測試
,路由器百兆、龍芯千兆。所以識別出來的時候可以看到,龍芯的開發板是自適應到100M的,這個是沒有問題的。但是再嘗試ping的時候發現沒法ping 通,我感覺很奇怪,因為看網上其他的壇友測試說只能跑千兆
發表于 08-13 11:34







 工商網監
工商網監
評論