 自動駕駛感知技術的研究
自動駕駛感知技術的研究
感知是什么?
在自動駕駛賽道中,感知的目的是為了模仿人眼采集相關信息,為后續做決策提供必要的信息。根據所做決策的任務不同,感知可以包括很多子任務:如車道線檢測、3D目標檢測、障礙物檢測、紅綠燈檢測等等;再根據感知預測出的結果,完成決策;最后根據決策結果執行相應的操作(如變道、超車等);
如何進行感知?
由于感知是為了模仿人眼獲取周圍的環境信息,那就必然需要用到傳感器來完成信息的采集工作;目前在自動駕駛領域中用到的傳感器包括:攝像頭(camera)、激光雷達(lidar)、毫米波雷達(radar)等;
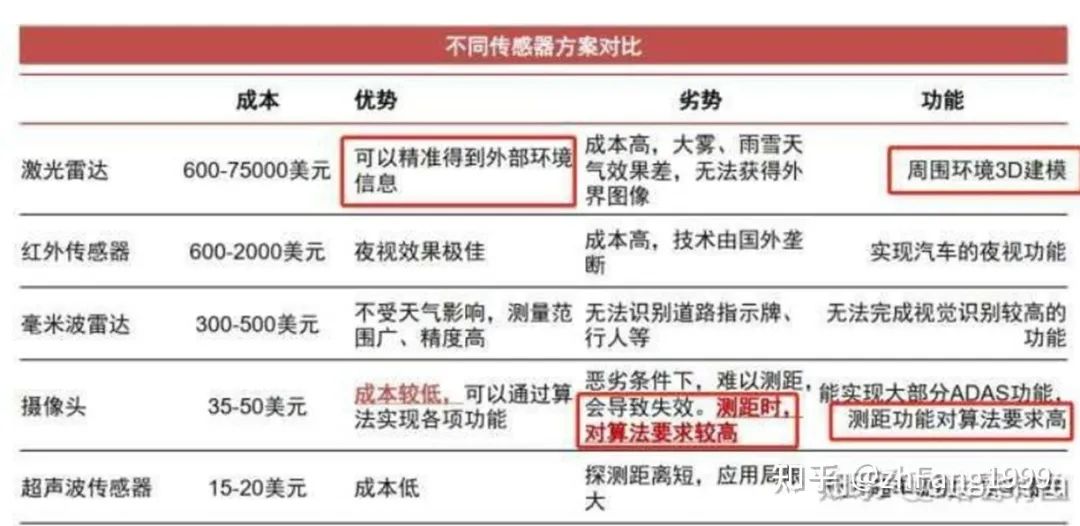
可以看到傳感器的種類眾多且成本參差不齊,所以如何使用這些傳感器進行感知任務,各個自動駕駛廠商都有各自的解決方案;純視覺的感知方案目前Tesla是純視覺感知方案的典型代表; 純視覺感知方案的優缺點也很明顯:優點:價格成本很低;缺點:攝像頭采集到的圖片是2D的,缺少深度信息,深度信息需要靠算法學習得到,缺少魯棒性;傳感器融合的感知方案目前大多數廠商采用的都是多傳感器融合的解決方案;其優缺點是:優點:能夠充分利用不同工作原理的傳感器,提升對不同場景下的整體感知精度,也可以在某種傳感器出現失效時,其他傳感器可以作為冗余備份,提高系統的魯棒性;缺點:由于采用多種傳感器價格相比純視覺高很多;傳感器后融合所謂后融合,是指各傳感器針對目標物體單獨進行深度學習模型推理,從而各自輸出帶有傳感器自身屬性的結果;每種傳感器的識別結果輸入到融合模塊,融合模塊對各傳感器在不同場景下的識別結果,設置不同的置信度,最終根據融合策略進行決策。 整體流程圖如下:
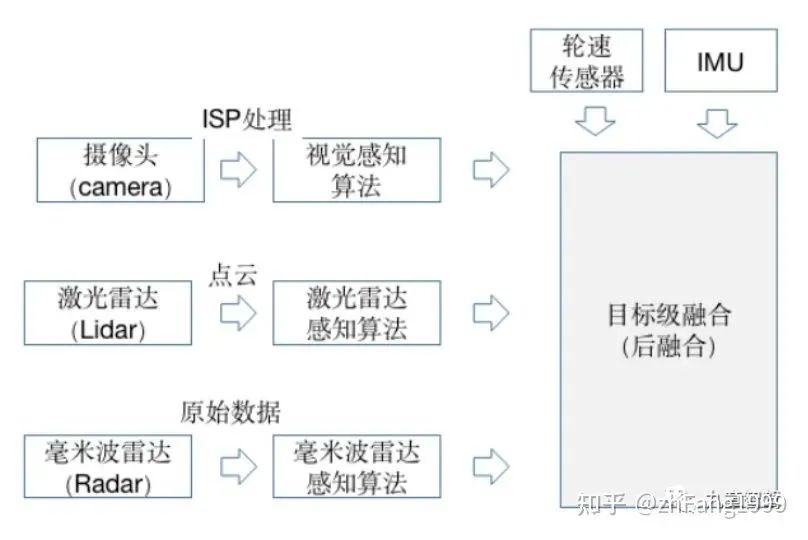
優點:不同的傳感器都獨立進行目標識別,解耦性好,且各傳感器可以互為冗余備份;同時后融合方案便于做標準的模塊化開發,把接口封裝好,提供給主機廠“即插即用”;對于主機廠來說,每種傳感器的識別結果輸入到融合模塊,融合模塊對各傳感器在不同場景下的識別結果,設置不同的置信度,最終根據融合策略進行決策。 缺點:存在“時間上的感知不連續”及“空間上的感知碎片化”空間上的感知碎片化由于車身四周的lidar、camera角度的安裝問題,多個傳感器實體無法實現空間域內的連續覆蓋和統一識別,導致攝像頭只捕捉到了目標的一小部分,無法根據殘缺的信息作出正確的檢測結果,從而使得后續的融合效果無法保證。時間上的感知不連續攝像頭采集到的結果是以幀為單位的,常用的感知方法是把連續單幀的檢測結果串聯起來,類似后融合的策略,無法充分利用時序上的有用信息。傳感器前融合所謂前融合,是將各個傳感器采集到的數據匯總到一起,經過數據同步后,對這些原始數據進行融合。 整體流程圖如下:
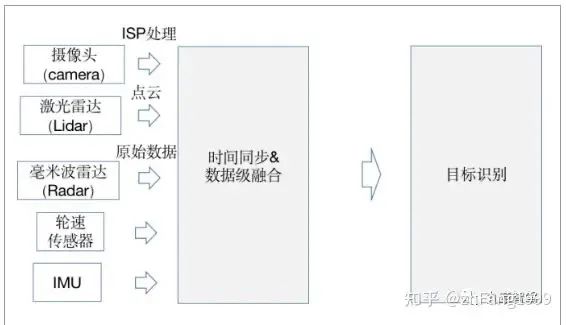
優點:讓數據更早的做融合,使數據更有關聯性;比如把激光雷達的點云數據和攝像頭的像素級數據進行融合,數據的損失也會比較少。 缺點:由于不同傳感器獲取的數據(攝像圖獲取的像素數據以及激光雷達獲取的點云數據),其坐標系是不同的;視覺數據是2D空間,而激光雷達的點云數據是3D空間。所以在異構數據的融合時,有兩種途徑:途徑一:在圖像空間利用點云數據提供深度信息;途徑二:在點云空間利用視覺數據提供語義特征,進行點云染色或特征渲染;
所以為了保證將不同坐標系下的數據(像素數據、點云數據)轉換到同一坐標系下進行數據融合方便后續的感知任務,BEV(Bird Eye View)視角下的感知逐漸受到廣泛的關注。傳感器中融合所謂中融合,就是先將各個傳感器采集到的數據通過神經網絡提取數據的特征,再對神經網絡提取到的多種傳感器特征進行特征級的融合,從而更有可能得到最佳感知結果。對異構數據提取到的特征在BEV空間進行特征級的融合,一來數據損失少,二來算力消耗也較少(相對于前融合),所以針對BEV視角下的感知任務,采用中融合的策略比較多。
BEV視角下的感知任務范式
將攝像頭數據(2D圖片)輸入到特征提取網絡中完成多個攝像頭數據的特征提取;
將所有攝像頭數據提取到的特征通過網絡學習的方式映射到BEV空間下;
在BEV空間下,進行異構數據的融合,將圖像數據在BEV空間下映射的特征與激光雷達點云特征進行融合;(可選,如BEVFormer僅用6個攝像頭構建BEV空間特征)
進行時序融合,融合前幾個時刻的特征,增強感知能力;(個人認為:引入時序特征后可以在一定程度上解決遮擋問題)
根據獲得到BEV特征,用于下游任務;(車道線檢測、障礙物檢測、3D目標檢測等子任務,相當于整個模型是一個多任務學習模型)
BEV視角下的感知具有的優勢
跨攝像頭融合和異構數據融合更容易實現
跨攝像頭融合或者異構數據進行融合時,由于不同數據其表示的坐標系不同,需要用很多后處理規則去關聯不同傳感器的感知結果,流程非常復雜。在BEV空間內做融合后,通過網絡自主學習映射規則,產生BEV特征用于感知下游任務,算法實現更加簡單,并且BEV空間內視覺感知到的物體大小和朝向也都能直接得到表達。
時序融合更容易實現
在構建BEV空間時,可以很容易地融合時序信息,使得獲取的BEV特征可以更好地實現下游的一些感知任務,如測速任務。
一定程度上緩解感知任務中的遮擋問題
傳統的2D感知任務只能感知看得見的目標,對于遮擋完全無能為力,而在BEV空間內,可以基于先驗知識或者利用時序融合,對被遮擋的區域進行預測,從而“腦補”出被遮擋區域可能存在物體。雖然“腦補”出的物體,有一定“想象”的成分,但這對于下游的規控模塊仍有很多好處。
方便多任務學習
使用傳統方法做感知任務時,需要依次做目標識別、追蹤和運動預測,更像是個“串行系統”,上游的誤差會傳遞到下游從而造成誤差累積;而在BEV空間內,感知和運動預測在統一空間內完成,因而可以通過神經網絡直接做端到端優化,“并行”出結果,這樣既可以避免誤差累積,也大大減少了人工邏輯的作用,讓感知網絡可以通過數據驅動的方式來自學習,從而更好地實現功能迭代。
審核編輯:郭婷
-
傳感器
+關注
關注
2562文章
52524瀏覽量
763411 -
自動駕駛
+關注
關注
788文章
14189瀏覽量
169418
原文標題:一文聊聊自動駕駛感知技術
文章出處:【微信號:談思實驗室,微信公眾號:談思實驗室】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監
評論