") UrbanScene3D大型數(shù)據(jù)集平臺(tái)用于研究城市場(chǎng)景感知和重建
UrbanScene3D大型數(shù)據(jù)集平臺(tái)用于研究城市場(chǎng)景感知和重建

本次導(dǎo)讀論文提出了一個(gè)用于研究城市場(chǎng)景感知和重建的大型數(shù)據(jù)平臺(tái)UrbanScene3D。該數(shù)據(jù)集包含超過(guò)12.8萬(wàn)張高分辨率圖像,涵蓋16個(gè)場(chǎng)景,包括總面積136平方公里的大型真實(shí)城市場(chǎng)景和虛擬城市場(chǎng)景。該數(shù)據(jù)集還包含高精度激光雷達(dá)掃描和數(shù)百個(gè)具有不同觀察模式的圖像集,為設(shè)計(jì)和評(píng)估無(wú)人機(jī)路徑規(guī)劃和三維重建算法提供了全面的基準(zhǔn)。此外,基于Unreal引擎和Airsim模擬器,數(shù)據(jù)集中每個(gè)建筑物均手動(dòng)標(biāo)注了唯一的實(shí)例標(biāo)簽,可以生成各種數(shù)據(jù),例如二維深度圖、二維/三維邊界框和三維點(diǎn)云/網(wǎng)格分割等。帶有物理引擎和照明系統(tǒng)的模擬器不僅可以生成各種數(shù)據(jù),還可以讓用戶(hù)在提供的城市環(huán)境中模擬無(wú)人車(chē)和無(wú)人機(jī),為未來(lái)的研究提供幫助。下表展示了UrbanScene3D中不同場(chǎng)景的統(tǒng)計(jì)數(shù)據(jù):
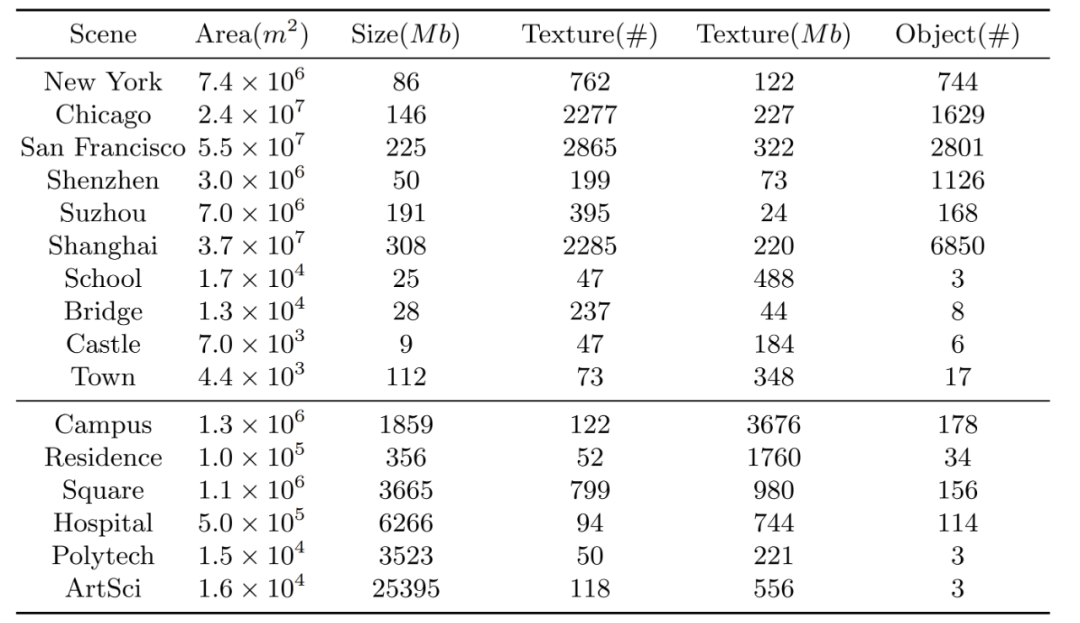
表1 UrbanScene3D不同場(chǎng)景數(shù)據(jù)統(tǒng)計(jì)
II 數(shù)據(jù)集特點(diǎn)
下表對(duì)比了UrbanScene3D與不同的戶(hù)外場(chǎng)景數(shù)據(jù)集:
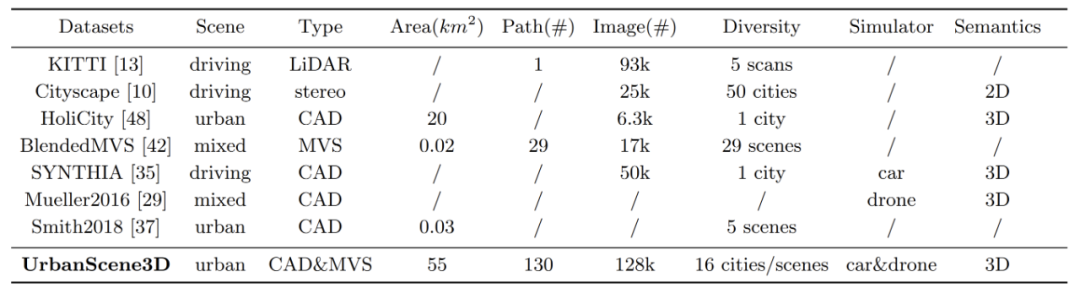
表2 不同戶(hù)外場(chǎng)景數(shù)據(jù)集對(duì)比
該論文提出的UrbanScene3D數(shù)據(jù)集具有以下特點(diǎn):
采集視角大:大多數(shù)戶(hù)外數(shù)據(jù)集是利用地面掃描設(shè)備采集的,不能夠完整地覆蓋整個(gè)場(chǎng)景。UrbanScene3D使用無(wú)人機(jī)根據(jù)不同的算法得到的路徑來(lái)采集場(chǎng)景信息,得到精度更高、更加完整的城市場(chǎng)景數(shù)據(jù);
場(chǎng)景覆蓋范圍大:UrbanScene3D提供了16個(gè)不同的城市場(chǎng)景,總面積136平方公里。其中包括三個(gè)覆蓋面積超過(guò)24平方公里的大規(guī)模城市場(chǎng)景和兩個(gè)覆蓋面積超過(guò)一平方公里的完整真實(shí)場(chǎng)景;
不同模式的觀測(cè)數(shù)據(jù):UrbanScene3D針對(duì)同一個(gè)場(chǎng)景提供在不同航拍路徑與不同時(shí)間、不同天氣條件、不同光照條件下采集到的數(shù)據(jù),增加了觀測(cè)數(shù)據(jù)的多樣性;
融合虛擬數(shù)據(jù)與真實(shí)數(shù)據(jù)的仿真環(huán)境:UrbanScene3D提供的模擬器可以導(dǎo)入虛擬城市模型與真實(shí)世界的重建場(chǎng)景,不僅能夠用于無(wú)人機(jī)、無(wú)人車(chē)的仿真,還可以用于解決虛擬數(shù)據(jù)與真實(shí)數(shù)據(jù)之間的跨領(lǐng)域誤差問(wèn)題;
針對(duì)無(wú)人機(jī)路徑規(guī)劃的數(shù)據(jù)集基準(zhǔn): UrbanScene3D針對(duì)不同無(wú)人機(jī)路徑規(guī)劃算法在不同的因素下對(duì)最終重建結(jié)果的影響進(jìn)行了詳細(xì)的對(duì)比與測(cè)試,為新的無(wú)人機(jī)路徑規(guī)劃算法與重建算法提供了新的評(píng)估基準(zhǔn)。
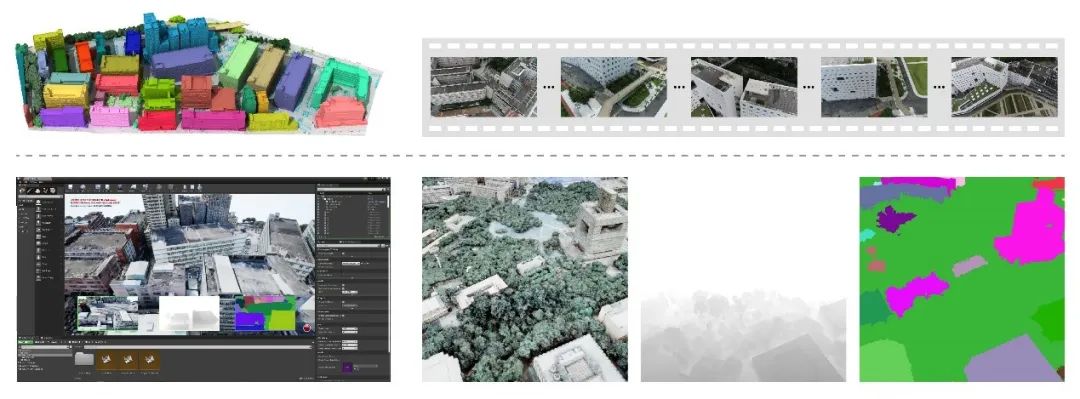
圖2 UrbanScene3D提供的模擬器能夠用于實(shí)時(shí)模擬、生成場(chǎng)景物體實(shí)例分割標(biāo)簽與深度圖 III 無(wú)人機(jī)路徑規(guī)劃基準(zhǔn) UrbanScene3D主要針對(duì)傾斜攝影、Smith [1]等人提出的算法、Zhou [2]等人提出的算法與Zhang [3]等人提出的算法進(jìn)行測(cè)試。這四種算法生成的無(wú)人機(jī)路徑如圖3所示:

圖3 不同算法在兩個(gè)場(chǎng)景上生成的路徑示意圖
當(dāng)前的無(wú)人機(jī)路徑規(guī)劃算法主要依賴(lài)于預(yù)先得到的場(chǎng)景粗糙模型,即代理模型,來(lái)進(jìn)行無(wú)人機(jī)路徑的優(yōu)化。同樣的路徑規(guī)劃算法利用精細(xì)的代理模型通常可以得到更好的重建結(jié)果。UrbanScene3D對(duì)虛擬場(chǎng)景提供了從粗糙到精細(xì)四個(gè)層級(jí)的代理模型,對(duì)真實(shí)場(chǎng)景提供了三個(gè)層級(jí)的代理模型,如圖4所示。UrbanScene3D分別使用不同層級(jí)的代理模型在不同的采樣點(diǎn)重疊率下對(duì)以上四種無(wú)人機(jī)路徑規(guī)劃算法進(jìn)行對(duì)比評(píng)估。
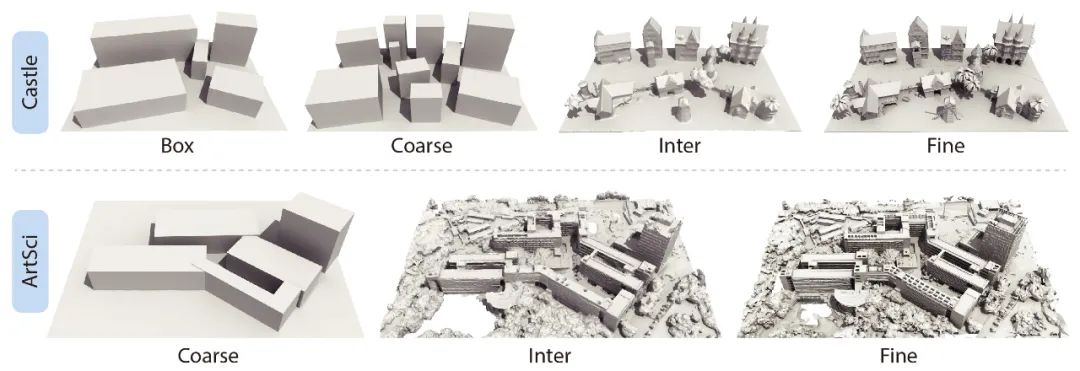
圖4 不同層級(jí)的代理模型示意圖 為了對(duì)重建得到的真實(shí)場(chǎng)景模型進(jìn)行重建精度與完整度評(píng)估,UrbanScene3D利用搭載GPS定位設(shè)備的高端激光雷達(dá)掃描儀對(duì)場(chǎng)景中的整棟建筑進(jìn)行掃描,得到高精度的場(chǎng)景掃描點(diǎn)云,如圖5所示:
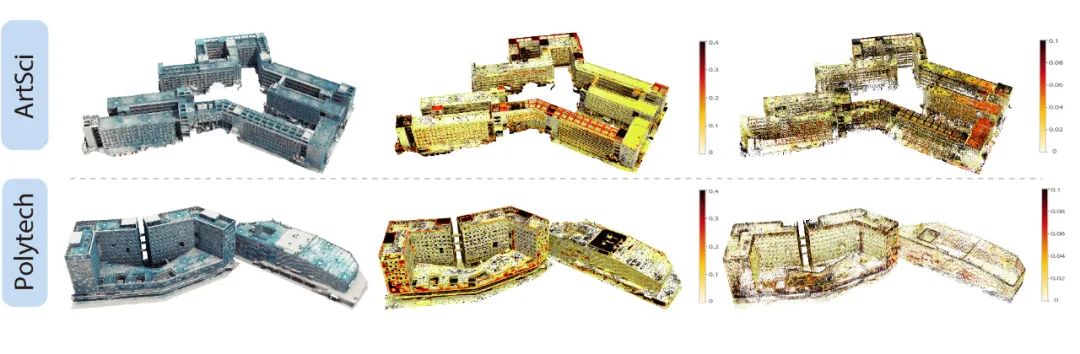
圖5 兩個(gè)真實(shí)場(chǎng)景的高精度激光點(diǎn)云與對(duì)應(yīng)重建模型的誤差示意圖
由于傾斜攝影具有最簡(jiǎn)單的路徑模式,因此電量消耗最小,但重建結(jié)果最差。Zhang 等人的方法在規(guī)劃路徑的同時(shí)對(duì)生成路徑的質(zhì)量進(jìn)行優(yōu)化,因此能夠在得到高精度模型的同時(shí)減小電量的消耗。Smith 等人與Zhou等人提出的算法都能夠得到更好的重建結(jié)果,但Zhou等人提出的算法的飛行消耗更低。
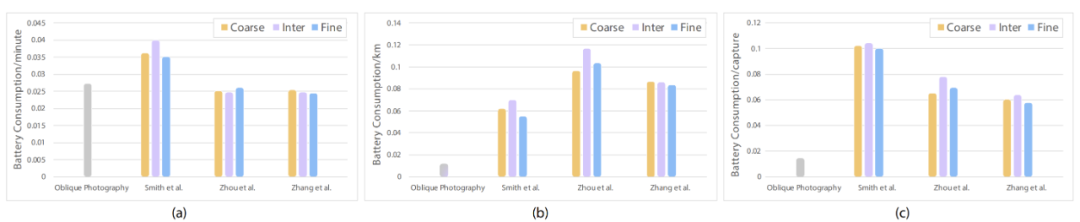
圖6 不同方法的采集電量消耗對(duì)比
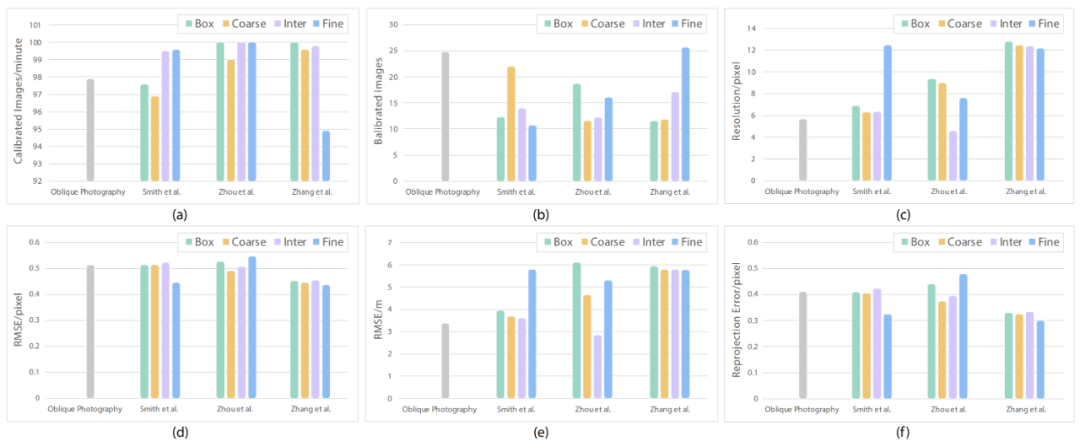
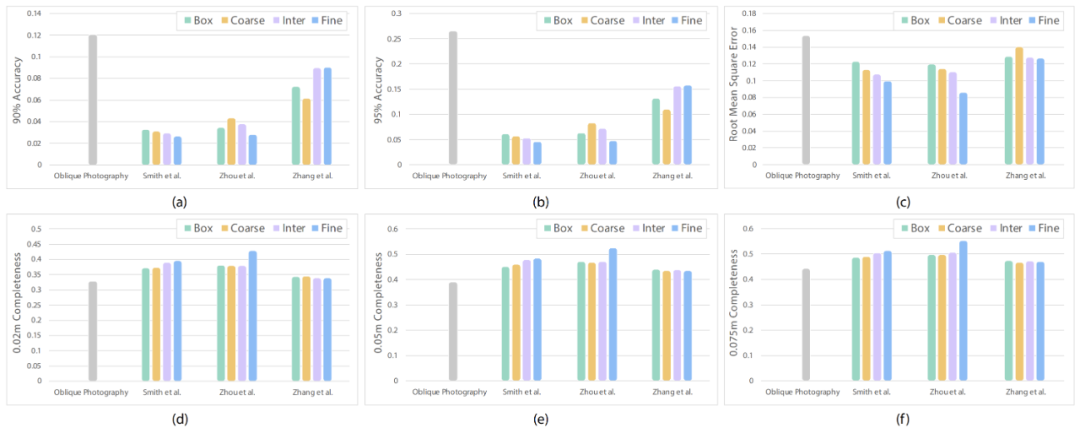
圖7 不同方法的采集重建精度對(duì)比
UrbanScene3D的下載與使用
UrbanScene3D一共包含1.43TB數(shù)據(jù)(壓縮包形式),其中帶有虛擬場(chǎng)景和真實(shí)場(chǎng)景模擬器63GB,帶有真實(shí)場(chǎng)景掃描數(shù)據(jù)的重建結(jié)果評(píng)估程序190MB。我們?cè)陧?xiàng)目主頁(yè) https://vcc.tech/UrbanScene3D/ 中提供UrbanScene3D相關(guān)數(shù)據(jù)的分類(lèi)下載與相關(guān)的使用說(shuō)明,支持Google Drive、Dropbox與百度云網(wǎng)盤(pán)三種下載方式。用戶(hù)可以根據(jù)需求按照不同的場(chǎng)景、不同的算法、不同的代理模型、不同的采樣重疊率下載航拍路徑、圖片與重建結(jié)果,也可以選擇將整個(gè)數(shù)據(jù)集打包下載。從仿真環(huán)境到評(píng)估程序的整套工具能夠有效地幫助相關(guān)研究工作的開(kāi)展和推進(jìn)。
總結(jié)
這篇文章詳細(xì)介紹了一個(gè)大型數(shù)據(jù)集平臺(tái)UrbanScene3D,為廣大用戶(hù)提供了豐富的數(shù)據(jù)標(biāo)簽和六個(gè)代表性場(chǎng)景在不同觀察模式下采集得到的不同數(shù)據(jù)。相應(yīng)的不同重建模型和GT模型/掃描點(diǎn)云可用于評(píng)估路徑規(guī)劃算法和MVS算法。此外,UrbanScene3D中包含的模擬器允許用戶(hù)進(jìn)一步探索和采集具有不同照明模式/天氣條件(如圖9所示)的城市場(chǎng)景數(shù)據(jù)。作者還計(jì)劃在不久的將來(lái)為數(shù)據(jù)集加入更高級(jí)的幾何描述信息,例如不同建筑的三維結(jié)構(gòu)點(diǎn)、橫截面輪廓、線(xiàn)框或面片等,以支持計(jì)算機(jī)圖形學(xué)和計(jì)算機(jī)視覺(jué)相關(guān)方向的進(jìn)一步探究。
審核編輯:郭婷
-
模擬器
+關(guān)注
關(guān)注
2文章
894瀏覽量
44392 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4234瀏覽量
192836 -
數(shù)據(jù)集
+關(guān)注
關(guān)注
4文章
1224瀏覽量
25445
原文標(biāo)題:采集、重建、模擬:UrbanScene3D數(shù)據(jù)集
文章出處:【微信號(hào):3D視覺(jué)工坊,微信公眾號(hào):3D視覺(jué)工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
康謀分享 | aiSim5仿真場(chǎng)景重建感知置信度評(píng)估(三)

康謀分享 | 3DGS:革新自動(dòng)駕駛仿真場(chǎng)景重建的關(guān)鍵技術(shù)

人工智能在城市發(fā)展的應(yīng)用及場(chǎng)景
基于MultiGen和Vega的城市場(chǎng)景仿真技術(shù)
新型智慧城市離我們還有多遠(yuǎn)
新型智慧城市的路還有多長(zhǎng)
3D的感知技術(shù)及實(shí)踐
基于Transformer的越野場(chǎng)景可通行區(qū)域檢測(cè)模型OFF-Net
介紹一種高效的線(xiàn)云重建算法ELSR
關(guān)于3D機(jī)器視覺(jué)的幾個(gè)技術(shù)趨勢(shì)
城市場(chǎng)景中自動(dòng)駕駛車(chē)輛基于高精度地圖的視覺(jué)語(yǔ)義定位

CVPR 2023最佳論文候選!真實(shí)高精3D物體數(shù)據(jù)集OmniObject3D

全新城市場(chǎng)景測(cè)試路段在DEKRA德凱勞希茨技術(shù)中心正式開(kāi)放
一個(gè)用于周視語(yǔ)義占用網(wǎng)格感知的基準(zhǔn)測(cè)試






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論