") 步進電氣角度細分控制的意義
步進電氣角度細分控制的意義
PART2細分控制
在上集我們知道,半步步進模式是組合了單相步進和整步步進,從而獲得了更多的電氣角位置。
那么如果想要獲得更多更細的步進電氣角度,是不是加入更多的角度位置就可以實現(xiàn)了?其實這就是細分控制的想法。
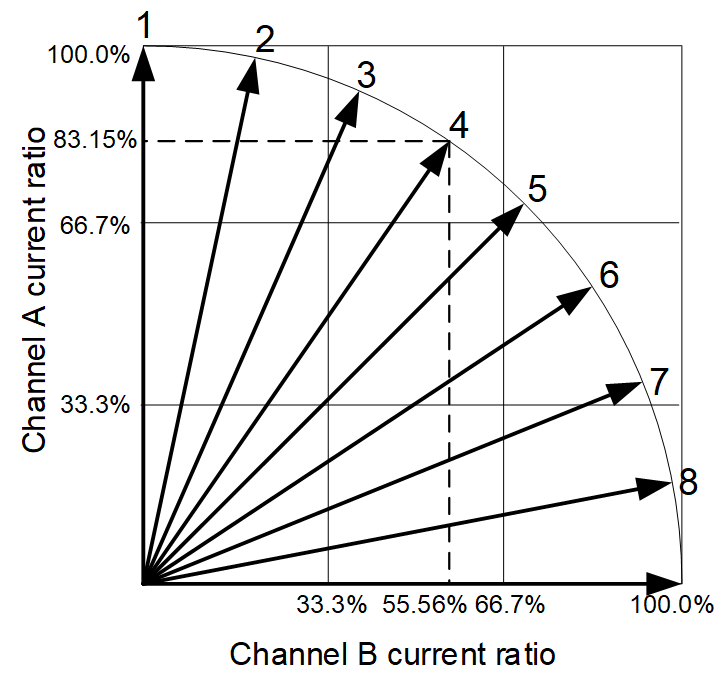
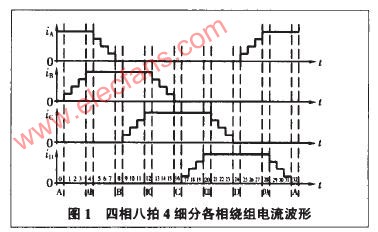
圖1:八細分電氣角
這是細分控制中的八細分的例子(見圖1),圖中可以看到單相步進AàB這一個90度電氣角度被等分成了8份,也就是有8個電流位置存在,每個位置的電流都是由A相繞組和B相繞組的電流在空間上矢量合成的,合成的幅值大小為單位1。我們將每個位置的電流分別投影到A相和B相上會獲得右邊的控制數(shù)值表(見表1)。
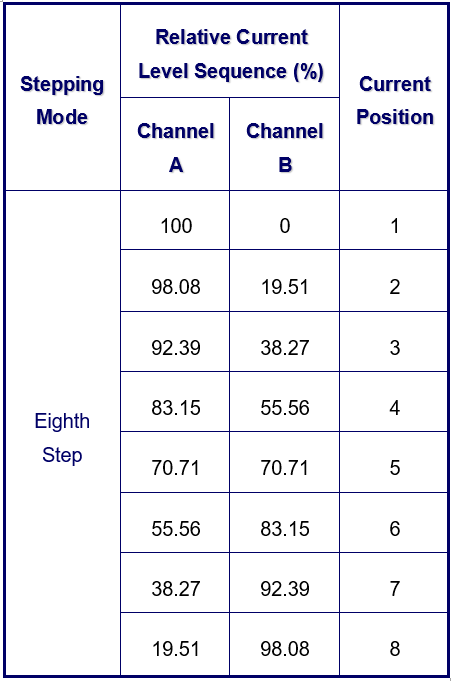
表1:八細分控制數(shù)值表
如果我們需要這個位置的電流,就按照數(shù)值表中對應(yīng)的數(shù)值來控制A相和B相的電流,就能實現(xiàn)這一角度位置的電流控制,被控制的A相和B相電流就能合成對應(yīng)角度的電流矢量。
在八細分的控制下,步進電機的電流會變成類正弦(見圖2),A相和B相電流就像走臺階一樣,按照每一個合成電流大小的數(shù)值走著。如果細分數(shù)更多,那么電流波形就更加趨近于正弦。正弦的電流波形將會減小電機輸出力矩的波動,在空間上會形成圓形旋轉(zhuǎn)的磁場,步進電機轉(zhuǎn)動的穩(wěn)定性就會增強。
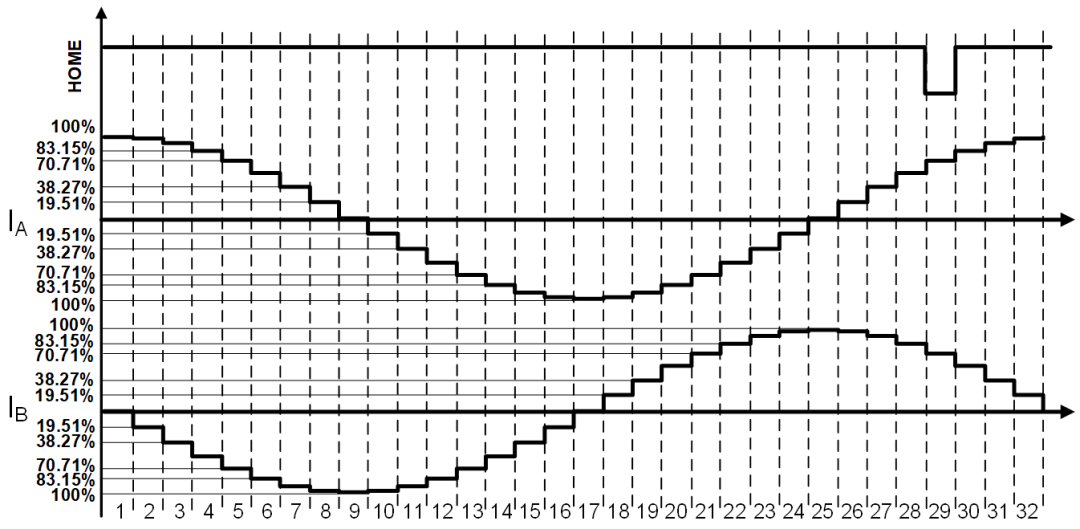
圖2:八細分控制下的A相B相電流波形
那么要如何進行每個電流臺階大小的調(diào)節(jié),將電流穩(wěn)定在這個數(shù)值上呢?
PART3電流調(diào)節(jié)
1
通常為了將電流穩(wěn)定在對應(yīng)的數(shù)值上,會采用 slow decay 和 fast decay 的控制方法,我們?nèi)相其中一段“臺階”來詳細看看。圖3為A相的電流調(diào)節(jié)波形圖,這是通過控制A相的全橋驅(qū)動的四個管子的通斷來實現(xiàn)(見圖4)。
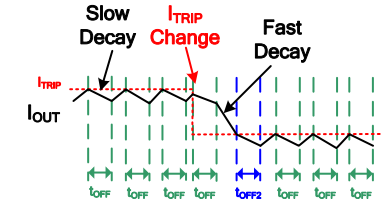
圖3:A相電流調(diào)節(jié)波形圖
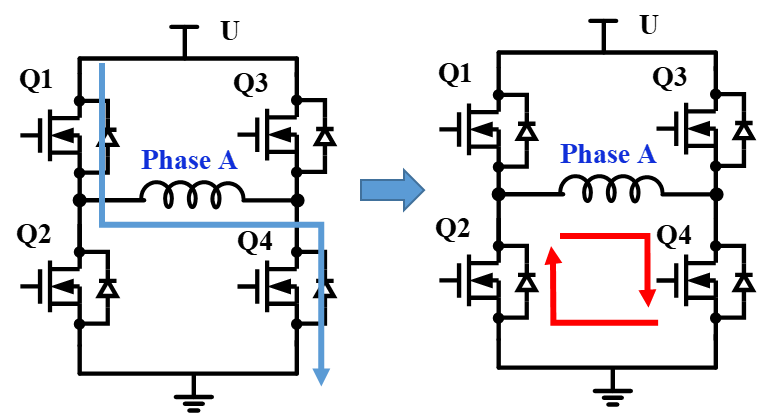
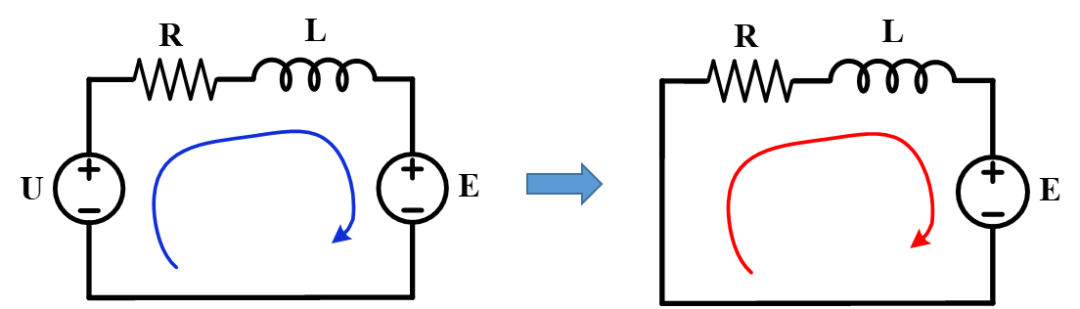
圖4:A相全橋驅(qū)動慢衰 slow decay 過程
當Q1和Q4開通的時候,供電電壓U加在A相繞組上,電流開始上升,對應(yīng)的等效電路中,R和L為等效阻抗,E為轉(zhuǎn)子旋轉(zhuǎn)時,A相繞組切割磁感線產(chǎn)生的反向電動勢,反電動勢反作用在繞組回路上。一旦電流值達到所設(shè)定的“臺階”值時,就需要去減小電流,不然電流會繼續(xù)增加下去,這將會超過這個“臺階”所設(shè)定的值。這個時候就需要用到慢衰 slow decay。
關(guān)閉Q1,并打開Q2(忽略死區(qū)時間),此時相當于A相繞組被短路,由于電機感性負載,電流方向不會突變,電流在兩個下管形成環(huán)流,只有反電動勢E作用在回路上,電流受到反向的壓降-E并開始下降。如果忽略掉阻值帶來的壓降,我們可以認為此時電流以-E/L的速度下降。
當電流下降一段時間后,關(guān)閉Q2開啟Q1,重新讓電流開始上升,如此循環(huán),電流就能穩(wěn)定在這個“臺階”所設(shè)定的值上。
2
那么當電流要進入下一個下降“臺階”的時候,電流需要進一步下降,如果電流下降的速度不夠快,就需要比較長的時間,那么慢衰的速度可能是不夠,這就需要用到快衰 fast decay 了。(見圖5)
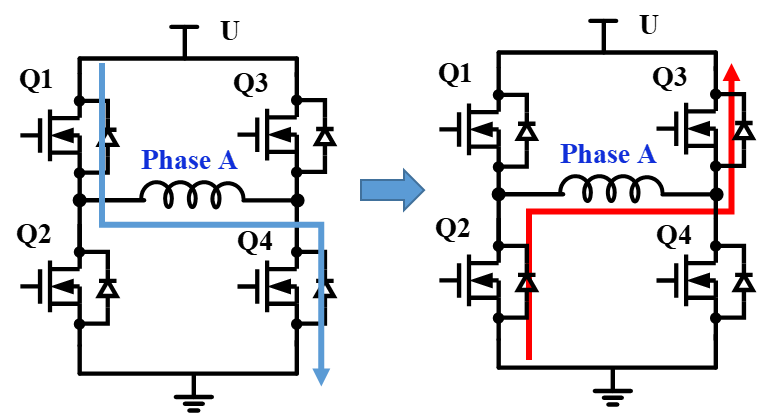
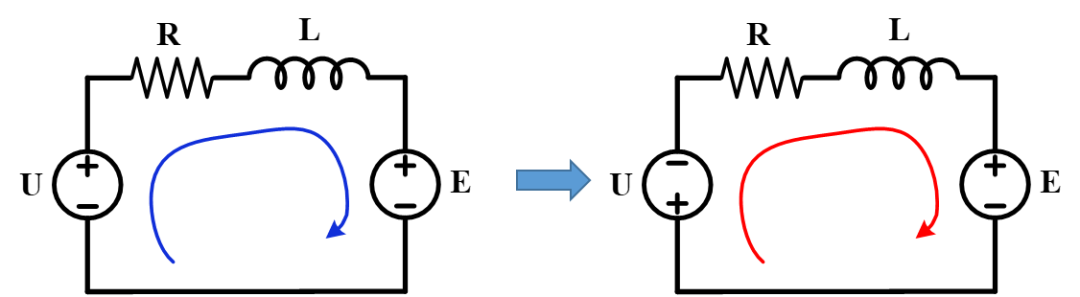
圖5:A相全橋驅(qū)動快衰 fast decay 過程
快衰是在關(guān)閉Q1和Q4后,打開Q2和Q3(忽略死區(qū)時間),此時供電電壓反向加在A相繞組上,再疊加上同樣反向加在繞組上的反電動勢E,電流同樣因為感性負載不會突變,電流從Q2流向Q3,此時電流將以-(E+U)/L的速度下降,所以電流會比慢衰下降得更快。
當電流降到下一個“臺階”的設(shè)定值后,電流調(diào)節(jié)就可以重新從快衰變成慢衰。這樣子合理地去運用慢衰和快衰,被控制的電流可以做到響應(yīng)既快,紋波又小。我們來看看只用快衰,慢衰,以及結(jié)合快衰和慢衰的電流波形。其中,綠色波形為電流波形。(見圖6)
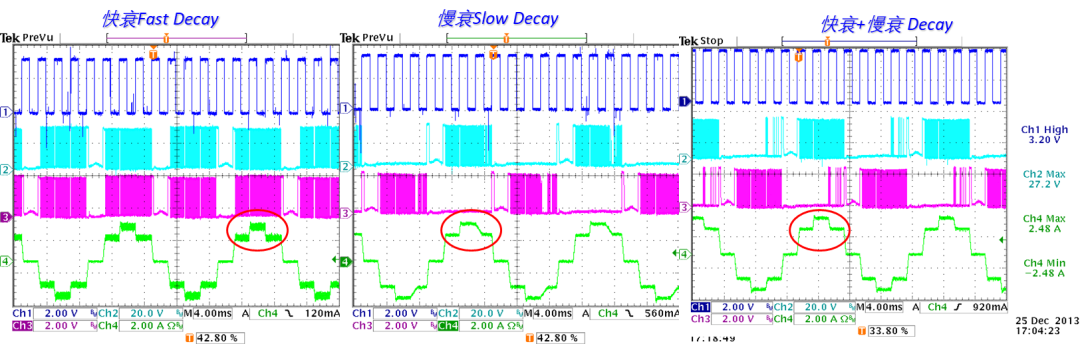
圖6:不同電流控制下的電流波形圖
可以看到只有快衰 fast decay,由于快速下降的電流,當電流需要穩(wěn)定在平臺上的電流紋波會較大;只有慢衰 slow decay,由于較慢的下降速度,當電流需要下到下一個臺階時間較長,導致波形有點畸變。
結(jié)合快衰 fast decay 和慢衰 slow decay,在穩(wěn)定住所設(shè)定的臺階值的時候用慢衰 slow decay,在需要電流快速下降到下一個臺階值的時候用快衰 fast decay,電流將會被控制得更好。
這樣一來,步進電輸出的力矩平滑性也會更好。步進電機的轉(zhuǎn)動振動更小,噪聲更小。
這就是細分控制的意義!如果步進電機旋轉(zhuǎn)速度過快,將會出現(xiàn)失步,關(guān)于如何解決這一問題,這里先挖一個坑,我們會在下一季的電源小課堂中和您深入探討,敬請期待!
-
電流
+關(guān)注
關(guān)注
40文章
7111瀏覽量
134057 -
步進電機
+關(guān)注
關(guān)注
152文章
3152瀏覽量
149054 -
反電動勢
+關(guān)注
關(guān)注
1文章
57瀏覽量
12583
原文標題:【短視頻】MPS 電源小課堂第三季第六話:細分控制 --- 雙極性步進電機如何練成“凌波微步”(下篇)
文章出處:【微信號:MPS芯源系統(tǒng),微信公眾號:MPS芯源系統(tǒng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
FPGA步進電機細分驅(qū)動控制設(shè)計
步進電機細分電路
步進電機多級細分驅(qū)動方法研究
步進電機細分驅(qū)動控制系統(tǒng)設(shè)計
步進電機細分驅(qū)動原理
步進電機細分驅(qū)動的實質(zhì)是什么
步進驅(qū)動器細分控制原理是什么?如何設(shè)置細分?
步進電機細分控制原理
步進電機的細分驅(qū)動及加減速控制

如何調(diào)整二相步進電機的步進角度,控制步進角度的功能?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論