 使用MicroPython在Raspberry Pi上通過雙核編程的多線程控制LED
使用MicroPython在Raspberry Pi上通過雙核編程的多線程控制LED
在本教程中,我們將使用 MicroPython在 Raspberry Pi Pico 上通過雙核編程的多線程控制兩個 LED 。
到目前為止,我們已經了解了如何連接OLED、LCD、伺服、超聲波傳感器,并且我們已經實現了I2C、ADC、與 Raspberry Pi Pico 的藍牙通信。RP2040微控制器pico 板具有雙核。如果您不熟悉多線程執行,那么請考慮一下您的計算機系統。它可以同時執行多個程序,這些程序可以由一個操作系統使用多線程來運行。但是我們在 Raspberry Pi Pico 上沒有任何操作系統來控制 CPU 周期,它只能支持每個內核一個線程,在這種情況下是兩個。
Raspberry Pi Pico 上雙核編程所需的組件
您需要確保擁有以下組件來演示 Pico 板上的雙核編程。
樹莓派 Pico
LED x2
電阻器 x2(330 歐姆)
面包板
連接電線
使用 Raspberry Pi Pico 板的伺服電機電路圖
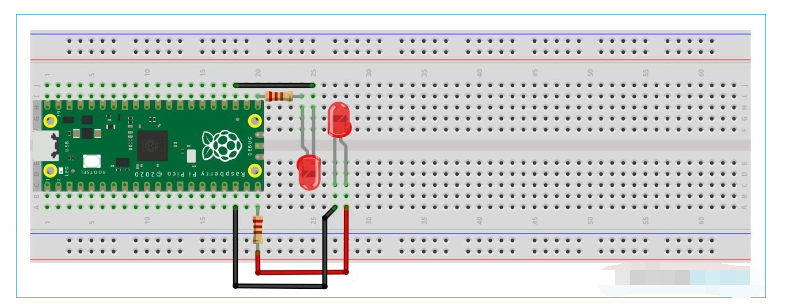
伺服電機的電路圖就是這么簡單。我已經分別使用兩個 330 歐姆電阻與 GPIO15 和 GPIO16 連接了兩個 LED。LED 的接地引腳已連接到 Pico 板的接地引腳。
使用雙核編程在 Raspberry Pi Pico 上進行多線程
您需要克隆我們的Raspberry Pi Pico 教程GitHub 存儲庫。然后打開“T9_DualCore_Program_PIco”文件夾。在此文件夾中,您可以找到“代碼”文件夾。在Thonny編輯器中打開“main.py”python 文件。現在,讓我們討論一下main.py文件。
從機器進口銷 導入 utime 導入_thread
首先,我們需要從上面提到的 machine.py 庫中導入Pin() 類。在我們之前的教程中,我們已經多次使用機器庫,希望您現在熟悉機器庫。然后我們需要導入“utime”庫來使用pico的內部時鐘。我們正在使用“_thread”庫來使用 raspberry pi pico 社區制作的線程函數。
led1 = Pin(16, machine.Pin.OUT) led2 = Pin(15, machine.Pin.OUT) sLock = _thread.allocate_lock()
在上面的代碼中,我使用“Pin(16, machine.Pin.OUT)”和“Pin(15, machine.Pin.OUT)”函數將 GPIO15 和 GPIO16 的兩個 LED 初始化為 OUPUT 。“_thread.allocate_lock()”函數可用于為兩個線程提供信號量鎖。如果想詳細了解這個函數,可以參考“_thread”庫的文檔。
定義核心任務():
而真:
sLock.acquire()
print("進入第二個線程")
utime.sleep(1)
led2.high()
print("Led 2 開啟")
utime.sleep(2)
led2.low()
print("Led 2 關閉")
utime.sleep(1)
print("從第二個線程退出")
utime.sleep(1)
sLock.release()
_thread.start_new_thread(CoreTask, ())
我們將在單線程的另一個內核中使用“CoreTask()”函數。在函數內的 while 循環中,我們使用信號量鎖來保持線程,直到它完成。然后我將 led2 調高 1 秒鐘,然后在 Thonny 的輸出端打印指令。然后我在線程完成時釋放信號量鎖。“_thread.start_new_thread(CoreTask, ())”函數將啟動線程。該函數將目標函數名作為第一個參數。在我的例子中,它是“CoreTask”,它在第二個參數中接受參數。就我而言,我沒有任何要傳遞的論點。
而真:
# 我們獲取信號量鎖
sLock.acquire()
print("進入主線程")
led1.toggle()
utime.sleep(0.15)
print("Led 1 開始切換。")
print("退出主線程")
utime.sleep(1)
# 我們釋放信號量鎖
sLock.release()
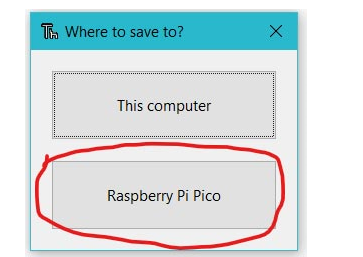
在上面的 while 循環中,我們類似地使用了另一個信號量鎖,以便主線程繼續運行直到它完成。它將切換 led1,然后釋放信號量鎖。現在,在 Thonny IDE中,打開 “main.py” 文件。首先, 通過按鍵盤上的 “ctrl+shift+s”鍵將“main.py”文件保存在 Pico 板上 。在保存文件之前,請確保您的 Pico 板已連接到您的筆記本電腦。保存代碼后,會出現一個彈出窗口,如下圖所示。您必須首先 選擇 Raspberry Pi Pico,然后 將文件命名為“main.py”并保存。 此過程使您能夠在 Pico 打開時運行程序。
當您在 Pico 板上上傳并運行代碼時,您會看到連接到 GPIO16 的 led1 以 1.15 秒的延遲切換。但是連接到 GPIO15 的 led2 會延遲 2 秒閃爍。您可以參考下面的視頻了解更多詳情。
代碼
主文件
進口機
導入 utime
導入_thread
led1 = machine.Pin(16, machine.Pin.OUT)
led2 = machine.Pin(15, machine.Pin.OUT)
sLock = _thread.allocate_lock()
定義核心任務():
而真:
sLock.acquire()
print("進入第二個線程")
utime.sleep(1)
led2.high()
print("Led 2 開啟")
utime.sleep(2)
led2.low()
print("Led 2 關閉")
utime.sleep(1)
print("從第二個線程退出")
utime.sleep(1)
sLock.release()
_thread.start_new_thread(CoreTask, ())
而真:
# 我們獲取信號量鎖
sLock.acquire()
print("進入主線程")
led1.toggle()
utime.sleep(0.15)
print("Led 1 開始切換。")
utime.sleep(1)
print("退出主線程")
utime.sleep(1)
# 我們釋放信號量鎖
sLock.release()
-
led
+關注
關注
242文章
23691瀏覽量
670776 -
Micropython
+關注
關注
0文章
68瀏覽量
5134
發布評論請先 登錄
【Embedded Pi申請】基于Raspberry Pi的智能家居遠程控制系統
Micropython STM32添加多線程功能
【BPI-Pico-RP2040 開發板】RP2040上的MicroPython環境中多線程編程
linux多線程編程課件
linux多線程編程開發

在Raspberry Pi上安裝RetroPie的教程

通過Twython在Raspberry Pi上發推文!(第2部分)





 工商網監
工商網監
評論