") 無(wú)人機(jī)遙感數(shù)據(jù)的處理與滑坡信息提取
無(wú)人機(jī)遙感數(shù)據(jù)的處理與滑坡信息提取
近些年無(wú)人機(jī)遙感技術(shù)發(fā)展迅速,已經(jīng)成為傳統(tǒng)航空攝影測(cè)量的有利補(bǔ)充,它具有拍攝角度靈活,起降不受地形地勢(shì)影響,懸停時(shí)間長(zhǎng),分辨率高等優(yōu)勢(shì),已被廣泛應(yīng)用在地質(zhì)環(huán)境與災(zāi)害調(diào)查、國(guó)土資源管理、基礎(chǔ)地理信息更新等領(lǐng)域。雖然無(wú)人機(jī)獲取的影像分辨率較高,但由于無(wú)人機(jī)所攜帶的相機(jī)一般為普通的數(shù)碼相機(jī),這種相機(jī)的像幅較小,使得獲取的影像數(shù)量較多,影像畸變較大;由于拍攝時(shí)傾角過(guò)大以及傾斜方向不規(guī)律的原因,使得相鄰影像同名點(diǎn)之間存在尺度與旋轉(zhuǎn)的差異;另外無(wú)人機(jī)上搭載的GPS精度較低,利用POS數(shù)據(jù)進(jìn)行絕對(duì)定向時(shí)誤差較大,因此只依賴于傳統(tǒng)的攝影測(cè)量方法不適合處理無(wú)人機(jī)影像。郭復(fù)勝等成功地將三維重建技術(shù)應(yīng)用到無(wú)人機(jī)圖像處理領(lǐng)域,實(shí)現(xiàn)了對(duì)全自動(dòng)的大場(chǎng)景三維重建,從而實(shí)現(xiàn)了利用無(wú)人機(jī)影像獲取高分辨率的DOM,但未獲取地面控制點(diǎn),因此無(wú)法進(jìn)行絕對(duì)定向,限制了成果的進(jìn)一步利用。雖然近些年無(wú)人機(jī)遙感得到了廣泛的應(yīng)用,但是在滑坡信息提取方面的研究較少,特別是運(yùn)用高精度的DEM與DOM對(duì)滑坡區(qū)域進(jìn)行定量的提取與分析方面。
因此,本文采用多旋翼無(wú)人機(jī)搭載高光譜成像相機(jī)的影像獲取平臺(tái),采取傾斜拍攝與垂直拍攝相結(jié)合的拍攝方式,獲取了滑坡表面豐富的光譜與紋理信息;在絕對(duì)定向方面,采用RTK野外測(cè)量控制點(diǎn)的方式,克服了POS信息精度低的問(wèn)題;在影像處理方面,將計(jì)算機(jī)視覺(jué)算法與攝影測(cè)量原理相結(jié)合,實(shí)現(xiàn)了DEM與DOM的數(shù)據(jù)生產(chǎn);在滑坡信息提取方面,采用多尺度分割與面向?qū)ο蠓诸?lèi)方法,并引入了坡度信息、可見(jiàn)光波段差異植被指數(shù)、灰度共生矩陣作為分類(lèi)參數(shù),運(yùn)用基于閾值的模糊分類(lèi)與SVM監(jiān)督分類(lèi)方法實(shí)現(xiàn)了滑坡信息的提取,使得無(wú)人機(jī)遙感在滑坡信息提取領(lǐng)域有了更深一步的應(yīng)用。
1 研究區(qū)概況和數(shù)據(jù)獲取
1.1研究區(qū)概況
本文的研究區(qū)位于北京市西南部的霞云嶺鄉(xiāng)附近,經(jīng)度范圍115°36′20″~115°37′25″E,緯度范圍39°42′35″~39°43′25″N。研究區(qū)縱向長(zhǎng)為850m,橫寬約900m,海拔范圍378~850m,研究區(qū)概況如圖1所示。研究區(qū)主要為山區(qū),地形起伏較大,平均坡度為30°,其中疑似滑坡區(qū)域的最大坡度為55°。該區(qū)域主要為公路施工殘?jiān)亩言鼒?chǎng),表現(xiàn)出潛在的變形復(fù)活跡象,伴隨著復(fù)雜的地形條件和人為因素,一旦發(fā)生滑坡將會(huì)造成巨大的人員和財(cái)產(chǎn)損失。
1.2控制點(diǎn)的量測(cè)
本文選擇55個(gè)均勻分布在研究區(qū)內(nèi)的控制點(diǎn)進(jìn)行三維坐標(biāo)的量測(cè),為了獲得高精度的控制點(diǎn),選取地勢(shì)較高,視野開(kāi)闊的區(qū)域架設(shè)基站點(diǎn),并在每個(gè)測(cè)量點(diǎn)上涂抹油漆,便于后期對(duì)無(wú)人機(jī)影像進(jìn)行絕對(duì)定向。控制點(diǎn)的量測(cè)有兩個(gè)目的:①可以用來(lái)對(duì)無(wú)人機(jī)影像進(jìn)行絕對(duì)定向;②可以對(duì)獲取的DEM和DOM影像進(jìn)行精度驗(yàn)證。本實(shí)驗(yàn)空間參考選擇WGS_1984_UTM投影坐標(biāo)系,其中5個(gè)控制點(diǎn)用于絕對(duì)定向,公路區(qū)域內(nèi)20個(gè)點(diǎn)和滑坡區(qū)域內(nèi)30個(gè)點(diǎn)作為檢查點(diǎn),用于精度驗(yàn)證,其中測(cè)量點(diǎn)的空間位置與標(biāo)記以及基站的位置如圖1所示。
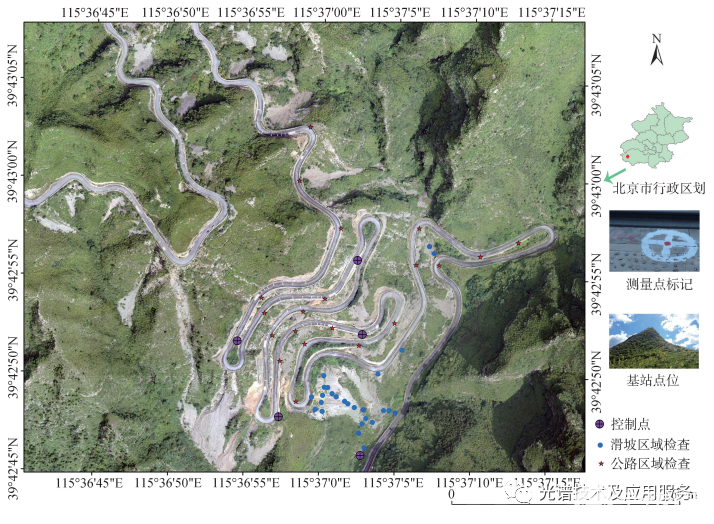
圖1研究區(qū)概況及控制點(diǎn)和檢查點(diǎn)的分布
1.3無(wú)人機(jī)影像的獲取
本文研究區(qū)為山區(qū),地勢(shì)起伏大,高程變化顯著,因而會(huì)增加影像的畸變,并且傳統(tǒng)的垂直拍攝的方式可能會(huì)損失部分紋理信息,因此本文對(duì)重點(diǎn)研究區(qū)域采取傾斜拍攝與垂直拍攝相結(jié)合的影像獲取方式,充分利用側(cè)視影像來(lái)獲取地物的側(cè)面紋理信息,更有利于提取滑坡特征。研究區(qū)內(nèi)大部分為山區(qū)的公路和低矮植被,地物種類(lèi)少,具有顯著特征的地物較少,為了保證影像匹配以及后期成果的精度,在航線規(guī)劃過(guò)程中盡量增加重疊度,本次飛行過(guò)程中航向重疊不低于75%,旁向重疊不低于60%。因此,在飛行航線的設(shè)計(jì)過(guò)程中,需要根據(jù)航向重疊、旁向重疊、地面分辨率的要求來(lái)設(shè)定飛行航高以及拍攝位置,并結(jié)合航高與相機(jī)參數(shù)來(lái)計(jì)算航線的最低點(diǎn)的分辨率,具體計(jì)算公式如下:
通過(guò)上述計(jì)算確定本次實(shí)驗(yàn)分為2次飛行:第1次飛行對(duì)整個(gè)研究區(qū)進(jìn)行垂直拍攝,飛行航高為950m;第2次飛行對(duì)重點(diǎn)滑坡區(qū)域進(jìn)行垂直拍攝加傾斜拍攝,其中垂直拍攝的飛行航高為720m,傾斜拍攝航高為700m。
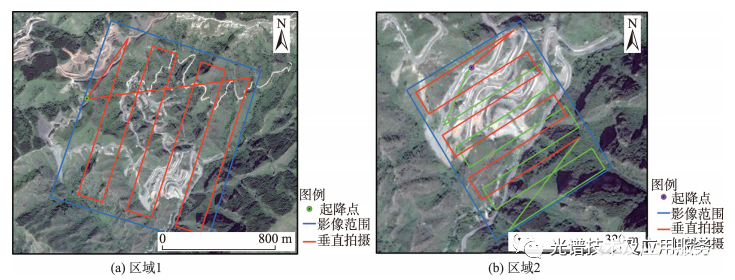
圖2飛行航線和影響范圍
2 數(shù)據(jù)處理和精度驗(yàn)證
2.1無(wú)人機(jī)影像的預(yù)處理
由于無(wú)人機(jī)的飛行姿態(tài)較不穩(wěn)定,加上北京的空氣常伴有霧霾,因此導(dǎo)致獲取的無(wú)人機(jī)影像曝光不均勻,相片偏白,本文采用多尺度Retinex算法對(duì)圖像進(jìn)行增強(qiáng)處理,該算法是一種基于光照補(bǔ)償?shù)挠跋裨鰪?qiáng)算法,經(jīng)過(guò)處理后每張照片圖像清晰,色調(diào)均勻。為了保證后期產(chǎn)品的精度,在人工選取控制點(diǎn)進(jìn)行絕對(duì)定向時(shí),選擇了標(biāo)志點(diǎn)清晰、重疊率高、均勻分布于重點(diǎn)研究區(qū)域的5個(gè)點(diǎn)作為控制點(diǎn),并將每個(gè)控制點(diǎn)轉(zhuǎn)刺到5到8張相片上,其中控制點(diǎn)的分布如圖1所示。
2.2自動(dòng)空中三角測(cè)量
空中三角測(cè)量是無(wú)人機(jī)影像處理的核心內(nèi)容,其結(jié)果的質(zhì)量直接影響后期DEM和DOM的精度,主要包括以下3個(gè)方面:
(1)特征點(diǎn)的提取與匹配:通過(guò)SURF算法提取每張照片的特征點(diǎn)進(jìn)行匹配,并通過(guò)RANSAC算法對(duì)匹配的結(jié)果進(jìn)行優(yōu)化,以提高匹配精度。
(2)相對(duì)定向與絕對(duì)定向:通過(guò)相片的焦距信息以及匹配的特征點(diǎn)進(jìn)行相對(duì)定向,從而恢復(fù)每張照片拍攝時(shí)的空間姿態(tài),其空間位置如圖3所示。接著通過(guò)野外測(cè)量的控制點(diǎn)進(jìn)行絕對(duì)定向,從而使每張照片具有絕對(duì)的空間坐標(biāo)。
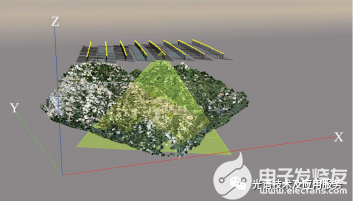
圖3相片的空間位置與覆蓋范圍
(3)光束法平差:根據(jù)提取的特征點(diǎn)以及匹配點(diǎn)來(lái)恢復(fù)投影光束,并按照光束法平差模型對(duì)研究區(qū)進(jìn)行整體解算,求取像點(diǎn)坐標(biāo)與相片的內(nèi)外方位元素。區(qū)域1中選取的5個(gè)控制點(diǎn)中誤差為0.103m,區(qū)域2中5個(gè)控制點(diǎn)中誤差為0.079m
2.3DEM和DOM的生產(chǎn)
DEM和DOM是后期信息提取的核心數(shù)據(jù),通過(guò)該數(shù)據(jù)可以獲取滑坡的空間形態(tài)與表面紋理信息。利用空中三角測(cè)量加密后的結(jié)果進(jìn)行密集匹配,生成高精度的三維點(diǎn)云數(shù)據(jù),依據(jù)點(diǎn)云數(shù)據(jù)生成DEM影像。根據(jù)高精度的DEM影像依次對(duì)每張相片進(jìn)行數(shù)字微分糾正,并進(jìn)行拼接與鑲嵌處理,從而獲得整個(gè)研究區(qū)的DOM影像。通過(guò)上述方法,獲得整個(gè)研究區(qū)(圖2(a))的DOM和DEM數(shù)據(jù),其空間分辨率為8.6cm,重點(diǎn)區(qū)域(圖2(b))的分辨率為5.4cm,數(shù)據(jù)成果如圖4所示。
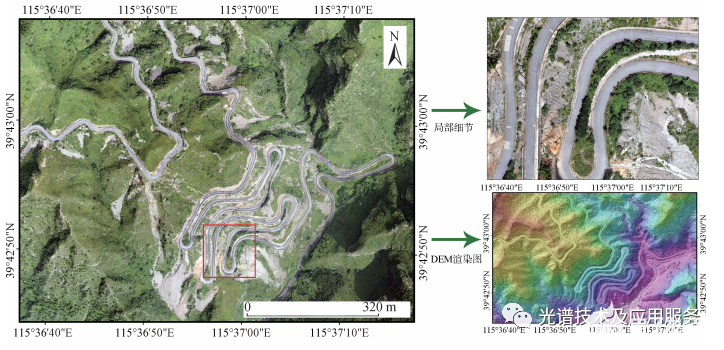
圖4研究區(qū)DOM與DEM影像
2.4DEM和DOM的精度評(píng)價(jià)
高精度的DEM和DOM數(shù)據(jù)對(duì)地形地勢(shì)分析和滑坡信息提取具有十分重要的意義,因此需要選擇合適的方法來(lái)對(duì)DEM和DOM進(jìn)行精度驗(yàn)證。本文通過(guò)野外測(cè)量的檢查點(diǎn)坐標(biāo)與獲取的DEM與DOM數(shù)據(jù)進(jìn)行運(yùn)算來(lái)完成精度驗(yàn)證。選取50個(gè)均勻分布在研究區(qū)內(nèi)的點(diǎn)作為檢查點(diǎn),其中30個(gè)點(diǎn)分布在滑坡區(qū)域,20個(gè)點(diǎn)分布在公路區(qū)域,分布情況如圖1所示。對(duì)于DEM的驗(yàn)證,通過(guò)將野外GPSRTK測(cè)量的檢查點(diǎn)高程值與相應(yīng)點(diǎn)的DEM影像值進(jìn)行運(yùn)算得到誤差。
DOM的精度評(píng)價(jià)方法與上述方法類(lèi)似,通過(guò)野外GPSRTK測(cè)量的檢查點(diǎn)平面坐標(biāo)與DOM上相應(yīng)點(diǎn)坐標(biāo)進(jìn)行運(yùn)算得到誤差。根據(jù)上述方法,計(jì)算得到DEM與DOM影像中檢查點(diǎn)中誤差,其中DEM影像的高程中誤差為0.253m,DOM的水平位移中誤差為0.104m。根據(jù)《數(shù)字航空攝影測(cè)量空中三角測(cè)量規(guī)范》(GB/T23236-2009)的要求,符合1:500的DEM與DOM的制作要求,因此,本文的實(shí)驗(yàn)成果具有較高的精度。本文獲取的DOM影像分辨率較高,較好地保留了局部的紋理信息,其中植被、裸露巖石、堆積碎石清晰可見(jiàn),彌補(bǔ)了衛(wèi)星影像分辨率不足的劣勢(shì)。參照驗(yàn)證結(jié)果,DEM數(shù)據(jù)具有較高的分辨率與位置精度,相較于地面測(cè)量獲取DEM的方式,本文的方法生產(chǎn)效率高,并且有精度保證;相較于運(yùn)用遙感影像建立的立體像對(duì)獲取DEM方法,本文的研究方法在精度上有了大幅度的提升。
萊森光學(xué)(深圳)有限公司是一家提供光機(jī)電一體化集成解決方案的高科技公司,我們專注于光譜傳感和光電應(yīng)用系統(tǒng)的研發(fā)、生產(chǎn)和銷(xiāo)售。
審核編輯 黃昊宇
-
無(wú)人機(jī)
+關(guān)注
關(guān)注
230文章
10725瀏覽量
185492 -
光譜傳感器
+關(guān)注
關(guān)注
1文章
86瀏覽量
15532
發(fā)布評(píng)論請(qǐng)先 登錄
遙感影像分析的方法與步驟
DIY了一臺(tái)無(wú)人機(jī),用全志T113芯片
基于無(wú)人機(jī)高光譜遙感的河湖水環(huán)境探測(cè)
基于無(wú)人機(jī)多光譜遙感的棉花生長(zhǎng)參數(shù)和產(chǎn)量估算
【「時(shí)間序列與機(jī)器學(xué)習(xí)」閱讀體驗(yàn)】時(shí)間序列的信息提取
【《時(shí)間序列與機(jī)器學(xué)習(xí)》閱讀體驗(yàn)】+ 時(shí)間序列的信息提取
基于無(wú)人機(jī)遙感的作物長(zhǎng)勢(shì)監(jiān)測(cè)研究進(jìn)展

無(wú)人機(jī)通過(guò)什么傳輸信號(hào)
無(wú)人機(jī)信號(hào)傳輸技術(shù)的原理及分類(lèi)
無(wú)人機(jī)干擾器對(duì)網(wǎng)絡(luò)的影響
如何選擇合適的無(wú)人機(jī)吊艙?

無(wú)人機(jī)智能巡檢系統(tǒng)
基于無(wú)人機(jī)高光譜遙感的荒漠化草原地物分類(lèi)研究2.0
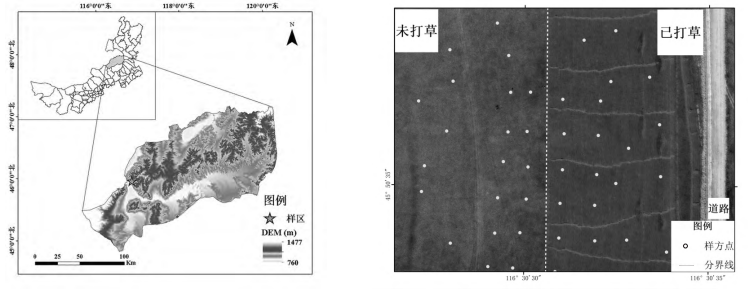
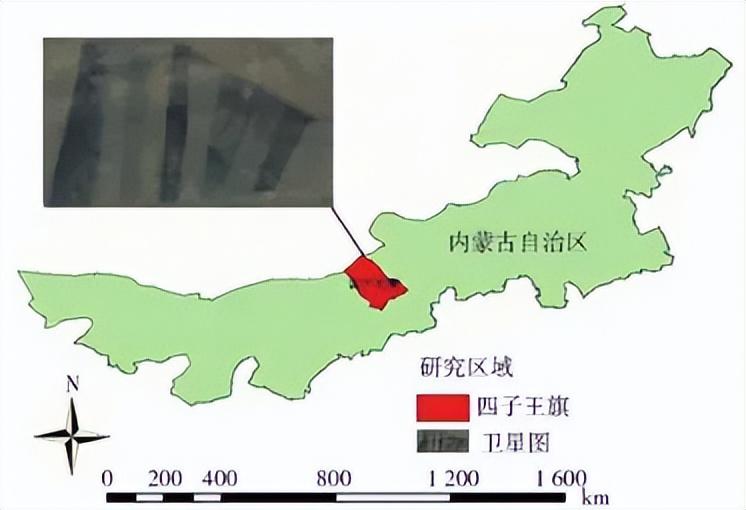
基于無(wú)人機(jī)高光譜遙感的典型草原打草對(duì)植被表型差異分析
基于無(wú)人機(jī)高光譜遙感的荒漠化草原地物分類(lèi)研究1.0





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論