") CAN協(xié)議的分層、特點(diǎn)及類型
CAN協(xié)議的分層、特點(diǎn)及類型

CAN協(xié)議的分層:
| 1.應(yīng)用層 |
| 最高層。用戶、軟件、網(wǎng)絡(luò)終端等之間用來(lái)進(jìn)行信息交換。如:DeviceNet |
| 2.表示層 |
| 將兩個(gè)應(yīng)用不同數(shù)據(jù)格式的系統(tǒng)信息轉(zhuǎn)化為能共同理解的格式 |
| 3.會(huì)話層 |
| 依靠低層的通信功能來(lái)進(jìn)行數(shù)據(jù)的有效傳遞。 |
| 4.傳輸層 |
| 兩通訊節(jié)點(diǎn)之間數(shù)據(jù)傳輸控制。操作如:數(shù)據(jù)重發(fā),數(shù)據(jù)錯(cuò)誤修復(fù) |
| 5.網(wǎng)絡(luò)層 |
| 規(guī)定了網(wǎng)絡(luò)連接的建立、維持和拆除的協(xié)議。如:路由和尋址 |
| 6.數(shù)據(jù)鏈路層 |
| 規(guī)定了在介質(zhì)上傳輸?shù)臄?shù)據(jù)位的排列和組織。如:數(shù)據(jù)校驗(yàn)和幀結(jié)構(gòu) |
| 7.物理層 |
| 規(guī)定通訊介質(zhì)的物理特性。如:電氣特性和信號(hào)交換的解釋 |
CAN 具有十分優(yōu)越的特點(diǎn),使人們樂(lè)于選擇。這些特性包括:
- 低成本
- 極高的總線利用率
- 很遠(yuǎn)的數(shù)據(jù)傳輸距離(長(zhǎng)達(dá) 10m)
- 高速的數(shù)據(jù)傳輸速率(高達(dá) 1Mbit/s)
- 可根據(jù)報(bào)文的 ID 決定接收或屏蔽該報(bào)文
- 可靠的錯(cuò)誤處理和檢錯(cuò)機(jī)制
- 發(fā)送的信息遭到破壞后,可自動(dòng)重發(fā)
- 節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重的情況下具有自動(dòng)退出總線的功能
- 報(bào)文不包含源地址或目標(biāo)地址,僅用標(biāo)志符來(lái)指示功能信息、優(yōu)先級(jí)信息
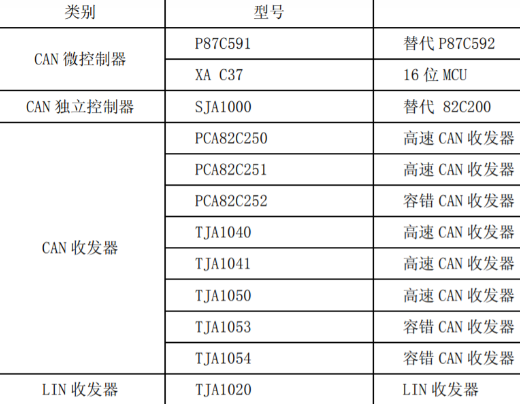
羅列CAN類型相關(guān)型號(hào)及說(shuō)明如下圖所示。
CAN的標(biāo)準(zhǔn)幀數(shù)擴(kuò)展幀屬性:
標(biāo)準(zhǔn) CAN 的標(biāo)志符長(zhǎng)度是 11 位,而擴(kuò)展格式 CAN 的標(biāo)志符長(zhǎng)度可達(dá) 29 位。CAN 協(xié)議的 2.0A 版本規(guī)定 CAN 控制器必須有一個(gè) 11 位的標(biāo)志符。同時(shí),在 2.0B 版本中規(guī)定,CAN 控制器的標(biāo)志符長(zhǎng)度可以是 11 位或 29 位。
遵循 CAN2.0B 協(xié)議的 CAN 控制器可以發(fā)送和接收 11 位標(biāo)識(shí)符的標(biāo)準(zhǔn)格式報(bào)文或 29 位標(biāo)識(shí)符的擴(kuò)展格式報(bào)文。
如果禁止 CAN2.0B,則 CAN 控制器只能發(fā)送和接收 11 位標(biāo)識(shí)符的標(biāo)準(zhǔn)格式報(bào)文,而忽略擴(kuò)展格式的報(bào)文結(jié)構(gòu),但不會(huì)出現(xiàn)錯(cuò)誤。
審核編輯:湯梓紅
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
控制器
+關(guān)注
關(guān)注
114文章
17098瀏覽量
184202 -
數(shù)據(jù)傳輸
+關(guān)注
關(guān)注
9文章
2018瀏覽量
66059 -
CAN
+關(guān)注
關(guān)注
57文章
2919瀏覽量
467736
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
一文讀懂CAN XL協(xié)議
隨著汽車和工業(yè)應(yīng)用中數(shù)據(jù)通信量的增加,傳統(tǒng)的CAN協(xié)議已無(wú)法滿足更高的數(shù)據(jù)速率需求。傳統(tǒng)CAN協(xié)議在數(shù)據(jù)速率和總線負(fù)載能力方面存在限制,難以滿足高帶寬和高實(shí)時(shí)性的應(yīng)用場(chǎng)景。為此,
淺談CAN協(xié)議轉(zhuǎn)換模塊
CAN(Controller Area Network)協(xié)議轉(zhuǎn)換模塊在現(xiàn)代工業(yè)自動(dòng)化、汽車制造、航空航天等領(lǐng)域扮演著至關(guān)重要的角色。作為連接不同CAN網(wǎng)絡(luò)或CAN與其他通信
基于Vector工具進(jìn)行CAN協(xié)議錯(cuò)誤幀的分析實(shí)踐
廣播發(fā)送的短幀結(jié)構(gòu),還體現(xiàn)在其錯(cuò)誤檢測(cè)機(jī)制上。通過(guò)總線數(shù)據(jù)以及總線波形來(lái)分析總線故障時(shí),CAN協(xié)議錯(cuò)誤檢測(cè)機(jī)制中豐富的錯(cuò)誤幀類型能讓定位問(wèn)題的效率更高。錯(cuò)誤幀是CA

AUTOSAR通信與CAN協(xié)議的關(guān)系
AUTOSAR通信模型: AUTOSAR定義了一個(gè)分層的軟件架構(gòu),其中包括應(yīng)用層、基礎(chǔ)軟件層和微控制器抽象層。在這些層中,通信模型是實(shí)現(xiàn)ECU之間通信的關(guān)鍵部分。AUTOSAR通信模型基于事件和信號(hào)
CAN總線與其他串行通信協(xié)議比較
CAN總線與其他串行通信協(xié)議相比,具有其獨(dú)特的特點(diǎn)和優(yōu)勢(shì)。以下是對(duì)CAN總線與UART、I2C、SPI等常見(jiàn)串行通信協(xié)議的比較: 一、基本特
【CAN總線知識(shí)】全面了解CAN總線協(xié)議
提及總線,總是讓人聯(lián)想到那些交錯(cuò)在一起的計(jì)算機(jī)電線。那么這些電線如何發(fā)揮功效呢?這還得配合總線協(xié)議的管理來(lái)使用。那么今天我們介紹的就是CAN總線協(xié)議。看看這個(gè)協(xié)議的含義和應(yīng)用吧。

汽車CAN總線的特點(diǎn)和應(yīng)用
汽車CAN總線是一種連接汽車各種控制單元的通信協(xié)議和數(shù)據(jù)傳輸標(biāo)準(zhǔn),它對(duì)于現(xiàn)代汽車的發(fā)展具有重要意義。以下是對(duì)汽車CAN總線的詳細(xì)解析,旨在全面闡述其概念、特點(diǎn)、工作原理、應(yīng)用以及未來(lái)發(fā)
對(duì)等通訊協(xié)議有哪些類型
是一些主要的對(duì)等通訊協(xié)議類型: 1. SIP(Session Initiation Protocol) 簡(jiǎn)介 :SIP是一種應(yīng)用層控制協(xié)議,用于創(chuàng)建、修改和終止多媒體會(huì)話(如視頻通話、音頻通話、即時(shí)消息等)。
CAN總線的報(bào)文類型介紹
CAN(Controller Area Network)總線是一種廣泛使用的串行通信協(xié)議,特別適用于汽車和工業(yè)自動(dòng)化領(lǐng)域。CAN總線上的報(bào)文類型主要可以分為以下幾種,每種
CAN總線的接口類型
CAN總線(Controller Area Network)是一種基于廣播的串行通信協(xié)議,廣泛用于連接分布式系統(tǒng)中的各個(gè)設(shè)備,實(shí)現(xiàn)它們之間的數(shù)據(jù)交換和控制。CAN總線接口的定義涵蓋了物理層和數(shù)據(jù)鏈路層的多個(gè)方面,包括接口
EtherCAT從站轉(zhuǎn)CAN協(xié)議網(wǎng)關(guān)(CAN轉(zhuǎn)EtherCAT)
EtherCAT的數(shù)據(jù)給CAN設(shè)備使用。 應(yīng)用廣泛:應(yīng)用于支持CAN接口的變頻器、步進(jìn)電機(jī)、伺服驅(qū)動(dòng)器、儀表、PLC、DCS、FCS等等。在自動(dòng)化倉(cāng)庫(kù)和物流輸送系統(tǒng)中,各類搬運(yùn)設(shè)備和傳感器可能使用CAN

CAN/CAN FD/CAN XL三大總線協(xié)議解讀,是逐步替代關(guān)系嗎?
進(jìn)入核心市場(chǎng)。 不過(guò),從市場(chǎng)表現(xiàn)來(lái)看,目前CAN/CAN FD/CAN XL各有各的市場(chǎng),并非逐步取代的關(guān)系,背后的原因是什么呢? ? CAN/CA
CAN中繼器的類型有哪些
應(yīng)用比較廣泛的CAN中繼器類型多樣,具體哪種類型更為廣泛可能因應(yīng)用領(lǐng)域和具體需求而異。然而,根據(jù)目前的信息,以下幾種CAN中繼器在應(yīng)用上相對(duì)較為普遍。
can網(wǎng)絡(luò)數(shù)據(jù)幀的特點(diǎn)
一、引言 CAN協(xié)議簡(jiǎn)介 :CAN(Controller Area Network)是一種用于汽車電子和工業(yè)自動(dòng)化等領(lǐng)域的串行通信協(xié)議,由德國(guó)博世公司開(kāi)發(fā)。
can信息幀數(shù)據(jù)鏈路層組成部分及功能
、智能家居等領(lǐng)域。 1.2 CAN協(xié)議的特點(diǎn) CAN協(xié)議具有以下特點(diǎn): 多主控制:





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論