") 人工智能和機器學(xué)習(xí)在汽車控制領(lǐng)域中的應(yīng)用
人工智能和機器學(xué)習(xí)在汽車控制領(lǐng)域中的應(yīng)用
引言
實際上,“人工智能(AI)”并沒有明確的科學(xué)定義,但是一種普遍的理解是將AI 被人類觀察到的學(xué)習(xí)系統(tǒng)作為“智能”。很難更加明確的描述其定義,因為“智能”一詞已經(jīng)缺乏明確的合理性。
在汽車領(lǐng)域,在當(dāng)今和未來具有代表性且廣為人知的AI相關(guān)功能應(yīng)用在自動駕駛(AD)領(lǐng)域。這包含了物體感知、物體識別以及對結(jié)果反應(yīng)的決策。這些應(yīng)用通常需要很高的計算能力(100k DMIPS級別范圍內(nèi))。
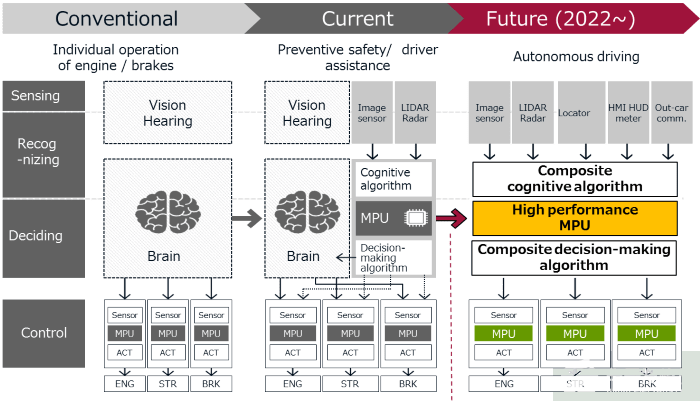
圖 1 說明更高級別的感知將如何隨著時間的推移從人類駕駛員轉(zhuǎn)向使用人工智能(AI)和機器學(xué)習(xí)(ML)的自動駕駛技術(shù)。(來源:NSITEXE, Inc.,2021)
較低的應(yīng)用層與傳統(tǒng)的實時執(zhí)行器控制有關(guān),如推進、轉(zhuǎn)向和制動等“車輛運動”,乍一看可能不是從人工智能和機器學(xué)習(xí)這種新興技術(shù)中獲益的主要目標,但是由于持續(xù)的成本壓力,在現(xiàn)如今并且很可能在未來,它將繼續(xù)通過常規(guī)微控制器以有限的嵌入式性能(高達 10k DMIPs)來實現(xiàn)。
然而,事實恰恰相反!
尤其是“車輛運動”類別的實時執(zhí)行器控制應(yīng)用受到各種新要求(例如 歐7 法規(guī))的挑戰(zhàn),這些要求導(dǎo)致算法復(fù)雜性增加并產(chǎn)生對更高性能水平和更大通信帶寬的需求。 所有這一切都將在沒有提到成本增加的前提下成為可能,這在汽車控制應(yīng)用中非常典型。
那么,如何在傳統(tǒng)的成本平衡MCU系統(tǒng)上實現(xiàn)人工智能和機器學(xué)習(xí)功能更高的性能要求呢? 答案在于特定的硬件加速器,它們可以作為協(xié)同處理器嵌入在 MCU 硅基中實現(xiàn)。
帶有嵌入式硬件加速器的 RH850/U2B 微控制器
瑞薩電子用于其下一代 28nm 微控制器 RH850/U2B FCC 的硬件加速器概念是:“DFP” 數(shù)據(jù)流處理器 IP (Data flow processor),又名“DR1000C”,已獲得日本 NSITEXE, Inc. 的許可。 NSITEXE 是一家 IP 供應(yīng)商,成立于 2017 年,是從 DENSO 公司獨立出來,專門從事高級處理器的開發(fā)。
RH850/U2B FCC 微控制器針對車輛運動和區(qū)域控制的應(yīng)用領(lǐng)域,通過虛擬化支持和服務(wù)質(zhì)量 (QoS) 實現(xiàn) 400 MHz x 8的性能,解決了將多個應(yīng)用程序集成到一個設(shè)備中同時不受干擾(FFI: freedom from interference)的挑戰(zhàn)以滿足 ISO26262 ASIL-D 標準。
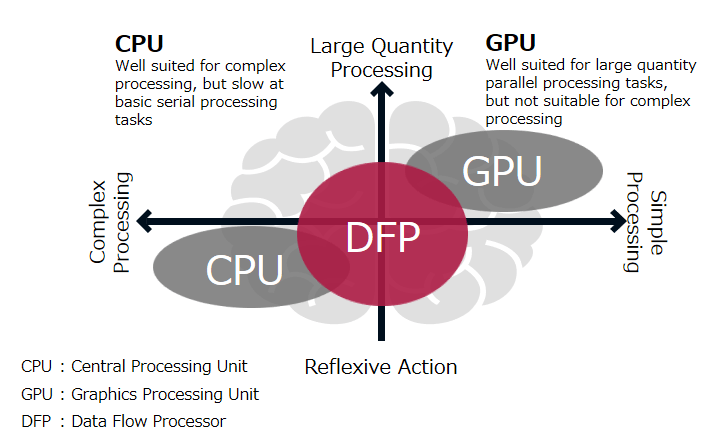
圖 2:DFP - 概念視圖
DR1000C 是一款基于 RISC-V 的專用并行協(xié)處理器,針對多線程機制和矢量指令進行了優(yōu)化設(shè)計,可從主 CPU 卸載密集計算任務(wù),從而加速高級控制算法。
從概念上講,DR1000C 是一種多指令多數(shù)據(jù) (MIMD) 高性能 ASIL-D 矢量處理器,可實現(xiàn)數(shù)據(jù)級和任務(wù)級并行。 矢量執(zhí)行單元與多線程架構(gòu)的結(jié)合實現(xiàn)了高度靈活性,從而加速通常用于人工智能和機器學(xué)習(xí)功能的各種算法類型。 有關(guān)更多詳細信息,請參閱下面的“用例”部分。
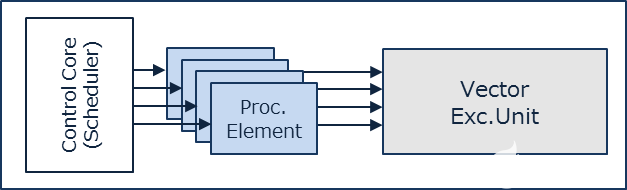
圖 3:DR1000C 架構(gòu)
DR1000C 性能
與傳統(tǒng)汽車 CPU(即Harvard架構(gòu))相比,DR1000C IP 的特定并行 MIMD 架構(gòu)帶來了數(shù)量級的性能優(yōu)勢。 特定的數(shù)學(xué)函數(shù),如高斯過程(徑向基函數(shù))、卡爾曼濾波器或 BLAS 在與 DR1000C 一起執(zhí)行時非常受益。
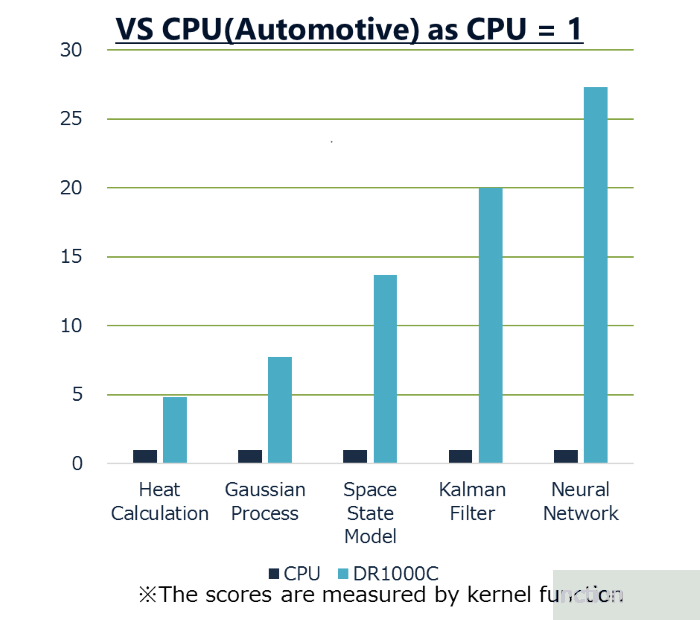
圖 4:DR1000C 性能水平
實例
在可以受益于 DR1000C的人工智能或機器學(xué)習(xí)的汽車環(huán)境中有多個實例。 以下是前面提到的“車輛運動”部分中的幾個應(yīng)用示例。
虛擬傳感器:這是一個通過虛擬處理實時模型來模擬相關(guān)現(xiàn)實世界系統(tǒng)的物理過程,從而取代物理硬件傳感器的概念。 這里的簡單動機是降低系統(tǒng)成本。 底層建模方法通常使用徑向基函數(shù)網(wǎng)絡(luò),可以將其解釋為人工神經(jīng)網(wǎng)絡(luò)。 徑向基函數(shù)有很多用例,包括函數(shù)逼近、時間序列預(yù)測和系統(tǒng)控制。
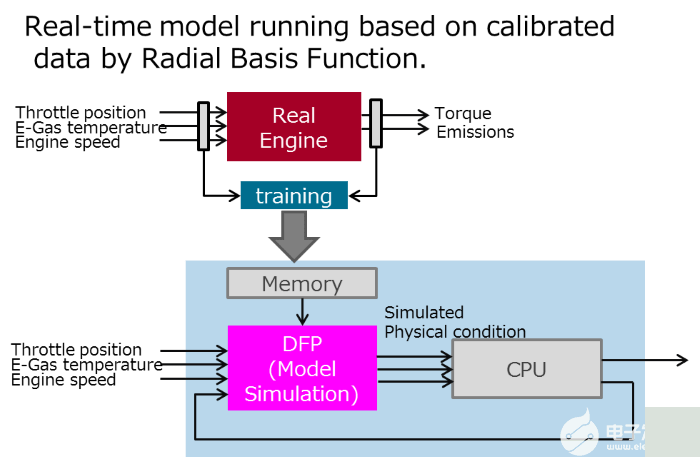
圖 5:虛擬建模
模型預(yù)測控制 (MPC) 是一種控制功率轉(zhuǎn)換器或電動機驅(qū)動器的方法學(xué)。 它通過動態(tài)預(yù)測和優(yōu)化系統(tǒng)參數(shù),并結(jié)合系統(tǒng)約束,提供處理多種控制任務(wù)的能力。 特別是非線性 MPC 模型可能會以訓(xùn)練數(shù)據(jù)集(基于人工神經(jīng)網(wǎng)絡(luò))的形式反映出來。
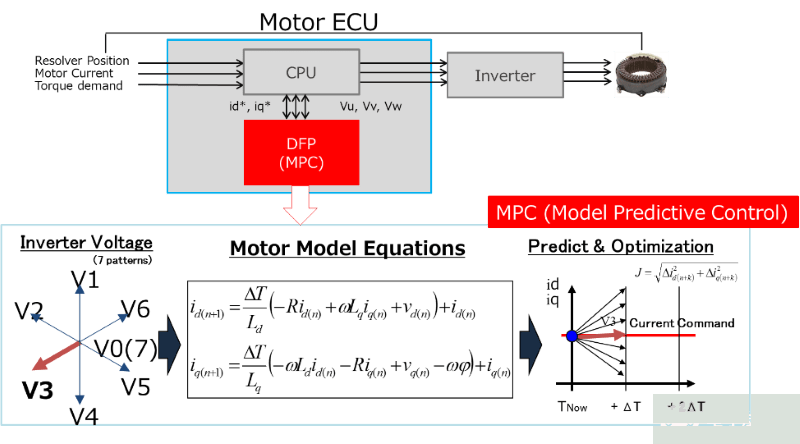
圖 6:模型預(yù)測控制(來源:NSITEXE, Inc.,2021)
網(wǎng)關(guān)入侵檢測系統(tǒng)(IDS)
IDS 系統(tǒng)通常應(yīng)該通過將“正常”活動與入侵者的行為進行比較來識別網(wǎng)絡(luò)攻擊。 今天,大多數(shù)基于規(guī)則的系統(tǒng)用于識別已知的攻擊類型,然而,如果攻擊使用不同的或迄今為止未知的方法,則不太成功。
在這里,機器學(xué)習(xí)提供了一種擴展的可能性,可以根據(jù)流量模式(包括帶寬、設(shè)備、端口和協(xié)議)對網(wǎng)絡(luò)活動進行分類。 通過將“健康”流量的訓(xùn)練(機器學(xué)習(xí)的)模式與實際網(wǎng)絡(luò)通信進行比較,可以實現(xiàn)對新演變的威脅類型的檢測。 這是靜態(tài)的基于規(guī)則的系統(tǒng)無法做到的。
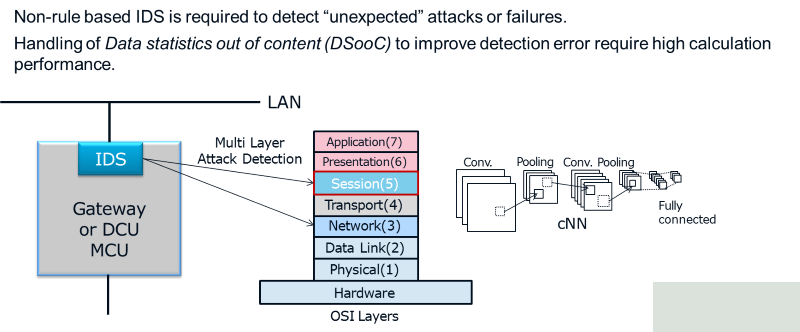
圖 7:入侵檢測系統(tǒng)概念
DR1000C工具環(huán)境
應(yīng)用程序開發(fā)可以通過 C 編碼實現(xiàn),其中用戶應(yīng)用程序用 C 語言編寫,結(jié)合內(nèi)部函數(shù)調(diào)用 DR1000C 服務(wù)。 或者,可以使用 MATLAB/Simulink 的“DFP 工具箱”進行基于模型的開發(fā)。 一個“SDK”將包括一個運行時線程調(diào)度器 (RTS)、一個基于 GNU 的工具鏈、模擬器和調(diào)試器。 另外可選擇地,在支持 ASIL-D 的診斷庫以及 ISO26262 工具認證方面的功能安全正在開發(fā)中。
結(jié)論
在不久的將來,基于成本平衡的汽車 MCU 系統(tǒng)必須能夠涵蓋廣泛的算法,尤其是機器學(xué)習(xí) (ML) 和嵌入式人工智能 (AI)、控制理論、信號處理和物理建模。
瑞薩電子將通過顯現(xiàn)出靈活硬件加速器概念的“DR1000C”來豐富下一代微控制器,該概念針對汽車實例進行了優(yōu)化,可以通過小數(shù)因子提高傳統(tǒng) MCU 的實時性能,同時將各自的成本和功耗保持在可承受的水平 。
審核編輯:郭婷
-
微控制器
+關(guān)注
關(guān)注
48文章
7903瀏覽量
153661 -
瑞薩電子
+關(guān)注
關(guān)注
37文章
2909瀏覽量
73106 -
機器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8490瀏覽量
134031
發(fā)布評論請先 登錄
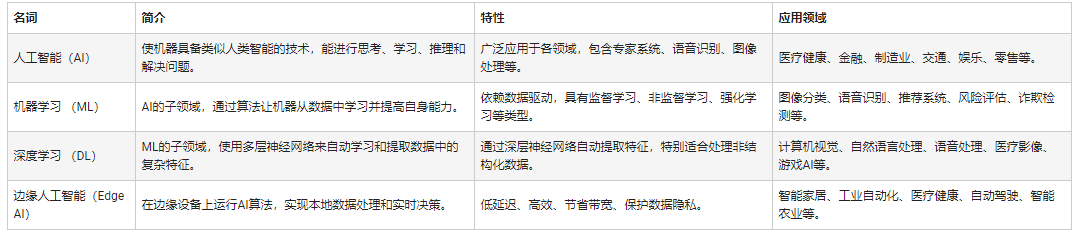
人工智能和機器學(xué)習(xí)以及Edge AI的概念與應(yīng)用
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統(tǒng)」閱讀體驗】+數(shù)據(jù)在具身人工智能中的價值
嵌入式和人工智能究竟是什么關(guān)系?
人工智能、機器學(xué)習(xí)和深度學(xué)習(xí)存在什么區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論