 如何驅動BLDC電機
如何驅動BLDC電機
我們都知道駕駛汽車時看清路面至關重要。而在實施自動駕駛等技術時,對這點要求得更為嚴格。自動駕駛汽車的“眼睛”被稱為光檢測和測距(激光雷達)技術,可提供汽車周圍環境的精確圖像。激光雷達使用光源和傳感器來檢測物體。
激光雷達系統的視場 (FOV) 決定了激光雷達能夠捕捉到的圖像的寬度,因此該視場對于自動駕駛決策算法十分重要。擴大 FOV 的方法有很多種,其中之一就是利用機械掃描,使用電機幫助實現 360 度 FOV。無刷直流 (BLDC) 電機可以實現此目標,且高效低噪,因此廣受歡迎。
圖 1 展示了激光雷達模塊,圖 2 展示了配備激光雷達的自動駕駛汽車。
圖 1:激光雷達模塊
圖 2:配備激光雷達的自動駕駛汽車
配備機械掃描激光雷達的自動駕駛汽車
典型的激光雷達模塊由光源和傳感器組成,可實現 120 度 FOV。遺憾的是 120 度的視場對于自動駕駛環境來說遠遠不夠。要實現 360 度全方位 FOV,需要用一個由置于旋轉平臺上的光源和傳感器組成的機械掃描激光雷達將汽車周圍的信息傳給汽車的高級駕駛輔助系統。旋轉平臺以能讓光源和傳感器實現 360 度無縫掃描的速度旋轉,準確反饋圖像位置。鑒于平臺重量比較輕,可以使用約 40W 的電機。
BLDC 電機非常適合這些旋轉平臺,并且可以使用霍爾效應傳感器實現 BLDC 電機換向。圖 3 顯示了機械掃描激光雷達的框圖。
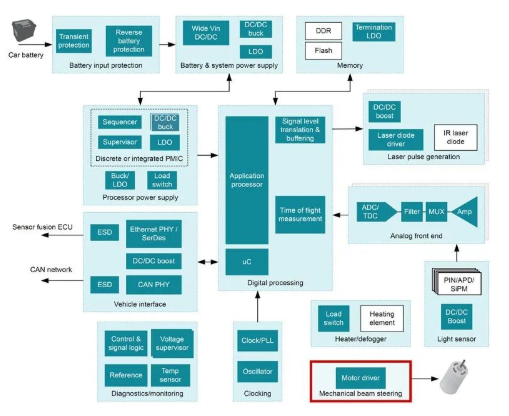
圖 3:機械掃描激光雷達框圖
如何驅動 BLDC 電機
有幾種方法可以驅動約 40W 的 BLDC 電機。您可以搭配使用具有梯形換向算法的微控制器 (MCU) 以及集成三相 BLDC 柵極驅動器和外部金屬氧化物半導體場效應晶體管 (MOSFET)。如果您的設計需要應用尺寸較小的電路板和功率較低的電機,您可以考慮將具有集成 MOSFET 的三相柵極驅動器(如DRV8316)和具有換向算法的 MCU 以及三個用于位置反饋的霍爾效應傳感器搭配使用。DRV8316 集成了高側和低側相加導通狀態電阻 (RDS(on)) 為 95mΩ 的 MOSFET,并提供全面的故障覆蓋范圍,以實現診斷目的。
也可以使用集成了控制算法的電機驅動器(如MCT8316Z)來驅動 BLDC 電機,該電機驅動器集成了傳感器梯形控制,無需進行電機控制軟件開發。MCT8316Z 集成了 MOSFET,該 MOSFET 高側和低側相加 RDS(on) 與 DRV8316 一樣,也是 95mΩ。外部搭配內務處理型 MCU,可與 MCT8316Z 進行通信以設置配置參數并提供簡單的旋轉命令(如速度和方向)。
MCT8316Z 具有直流/直流降壓轉換器,可為電路板上的內務處理型 MCU 或其他電路提供電流,這種配置有助于為機械掃描激光雷達電機驅動器節省布板空間。DRV8316 和 MCT8316Z 的工作電壓均為 4.5V 至 35V,非常適合汽車的 12V 電池應用。借助 8A 峰值電機繞組電流支持,這些驅動器可以在 24V 電源下實現高達 70W 的電機功率,足以驅動激光雷達系統的旋轉平臺。
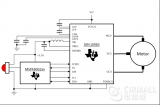
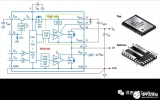
MCT8316Z 提供串行外設接口 (SPI),高度可配置,盡管系統設計人員可能會選擇使用硬件接口選項,而非 SPI 來配置常用設置。可通過 SPI 讀取的內部驅動器寄存器提供詳細的故障診斷結果,萬一旋轉平臺中的電機出現問題,該結果可提供診斷幫助。圖 4 顯示了 MCT8316Z 的簡化使用示例。
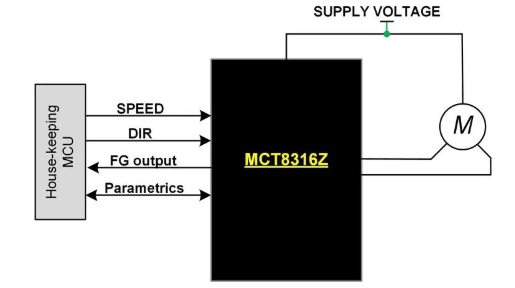
圖 4:MCT8316Z 電機控制示例
配備機械掃描激光雷達的自動駕駛汽車是汽車領域一次令人振奮的進展。自動駕駛汽車帶來的便利提高了乘駕體驗,讓您渴望擁有這樣一輛汽車去州際公路旅行。
-
電機驅動器
+關注
關注
16文章
663瀏覽量
65358 -
BLDC電機
+關注
關注
7文章
220瀏覽量
21898 -
自動駕駛
+關注
關注
788文章
14178瀏覽量
169328
發布評論請先 登錄
BLDC電機電位器調速
驅動BLDC電機的半橋開啟高端和低端MOSFET
使用X-NUCLEO-IHM07M1和FOC驅動BLDC電機發現過流保護一直觸發怎么解決
是否有任何庫可用于stm32f1** (用于梯形控制)?
求助,有人可以低速驅動BLDC電機嗎?
開源硬件-TIDA-00656-用于空氣凈化器風扇的 24V、50W BLDC 電機正弦驅動 PCB layout 設計

11個電機驅動設計方案的詳細資料合集
英飛凌提供緊湊三相驅動BLDC電機驅動方案

想用GaN功率級驅動BLDC電機?這組開發工具超好用!





 工商網監
工商網監
評論