") 基于MEMS和MR傳感器的嵌入式系統(tǒng)姿態(tài)測量
基于MEMS和MR傳感器的嵌入式系統(tǒng)姿態(tài)測量
1.介紹:
傳統(tǒng)的姿態(tài)測量系統(tǒng)采用捷聯(lián)式慣導系統(tǒng)(SINS),相比平臺式慣導系統(tǒng)而言,其具有體積相對更小,成本相對更低,易于安裝和維護并且可靠性更高的有點,因此,捷聯(lián)慣導系統(tǒng)在飛行器導航和姿態(tài)測量中得到了廣泛的研究和應用。
然而,傳統(tǒng)的姿態(tài)測量系統(tǒng)包括捷聯(lián)式慣導普遍具有體積大,重量大,復雜程度高等特點,使得傳統(tǒng)的姿態(tài)測量系統(tǒng)無法應用于日常應用。同時,傳統(tǒng)的捷聯(lián)慣導系 統(tǒng)一般需要一個尋北系統(tǒng)的輔助來獲得載體的方位角,但是傳統(tǒng)的尋北系統(tǒng)多為基于陀螺的系統(tǒng),其體積和復雜度也是日常應用所無法接受的。可見,對于對體積具 有嚴格限制的嵌入式系統(tǒng)而言,需要研制一種小型的姿態(tài)測量系統(tǒng)來滿足其姿態(tài)測量的要求。MEMS技術和MR技術的快速發(fā)展,為研制這種低成本,小體積,高 集成度的姿態(tài)測量系統(tǒng)提供了可能,從而可以使得對體積和成本敏感的系統(tǒng)具有姿態(tài)測量的能力。
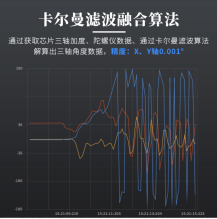
本文論述了由MEMS加速度計和MR傳感器組成的姿態(tài)測量系統(tǒng)。在本系統(tǒng)中,三軸MEMS加速度計用來獲得載體基于重力向量的俯仰角和橫滾角,而三軸MR傳感器的輸出經(jīng)過以俯仰角和橫滾角為參數(shù)的矩陣變換后可以給出載體相對于地磁北極的方位角。
2.硬件描述:
本論文論述的姿態(tài)測量系統(tǒng)主要由三軸MEMS加速度計,三軸MR傳感器,ARM內核微控制器和用于顯示結果的LCD顯示器組成。
2.1三軸MR傳感器
本系統(tǒng)選用了Honeywell的HMC2003三軸磁阻傳感器。HMC2003是一個高靈敏度三軸MR傳感器,它是由單軸MR傳感器HMC1001和雙 軸MR傳感器HMC1002組合而成。其精度可以達到400ugauss,量程為±2gauss,靈敏度為1V/gauss.磁阻傳感器在經(jīng)歷了強磁場之 后會被磁化而引起磁滯,從而引起輸出信號的失真,Honeywell的“set/reset”功能可以消除這種磁滯而使傳感器恢復到正常的工作狀態(tài)。
2.2 三軸MEMS加速度計
本系統(tǒng)中的加速度計選用了Freescale的MMA7260Q單片三軸加速度計。MMA7260Q是一個低成本的電容式微機械加速度計,其內部具有信號調整、單極低通濾波器、溫度補償?shù)裙δ埽淞砍炭梢酝ㄟ^編程選擇1.5g/2g/4g/6g之一。其主要特點如下:

2.3 微處理器
本系統(tǒng)選用的微處理器為Atmel公司的At91sam7s64 ARM微控制器。At91sam7s64是基于32位ARM內核的低管腳數(shù)高性能并且內置Flash的微控制器。其內部集成了64k字節(jié)Flash和 16k字節(jié)的SRAM以及大量的外設接口,例如兩個USART接口,可以分別用來與PC機通信和控制串口LCD屏顯示測量結果。其具有一個10位的SAR 逐次逼近式A/D轉換器,并具有8選1模擬復用器。A/D轉換器的采樣率可以達到384ksps.At91sam7s64的ARM內核的最高運行頻率可以 達到55MHz,0.9Mips/MHz,以上的特點使At91sam7s64非常適合于低成本體積敏感的姿態(tài)測量系統(tǒng)。
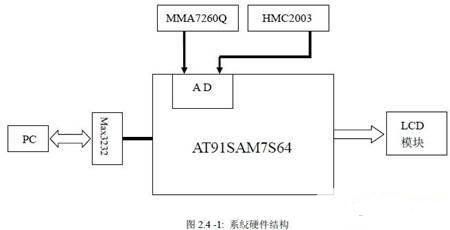
2.4硬件結構:
本系統(tǒng)的硬件結構如圖2.4 -1所示。由于At91sam7s64具有片上A/D轉換器而且具有8選1模擬復用器,使得MMA7620Q和HMC2003可以直接與微控制器相連而不 必外加A/D轉換器和復用器,不僅降低了系統(tǒng)的成本和體積,提高了系統(tǒng)的集成度,同時減少了誤差源,提高了精度。經(jīng)過A/D轉換的測量數(shù)據(jù)經(jīng)過ARM核的 處理后,被送到串口LCD并通過RS232接口送入PC機進行進一步的分析。
3.姿態(tài)參數(shù)的獲得
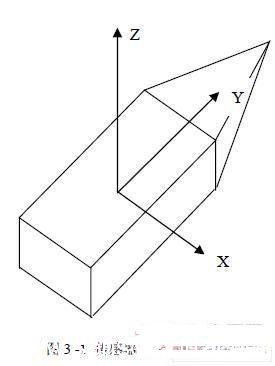
在本系統(tǒng)中,三軸加速度計和三軸MR傳感器都以以下的方式安裝于電路板上:它們的X軸平行于系統(tǒng)的橫軸指向右,Y軸平行于系統(tǒng)的縱軸指向前,X、Y、Z軸定義為右手坐標系統(tǒng),如圖3 -1所示。
3.1俯仰角與橫滾角的獲得:
為了獲得系統(tǒng)基于重力向量的俯仰角θ和橫滾角φ,需要使用加速度計的三個輸出:Ax, Ay, Az.俯仰角和橫滾角可以通過以下公式(1)和公式(2)計算得到。對于微控制器,函數(shù)中的arctan(x)需要通過以下公式(3)的泰勒展開后才能計算得到。
-
傳感器
+關注
關注
2562文章
52524瀏覽量
763468 -
電路板
+關注
關注
140文章
5086瀏覽量
101416
發(fā)布評論請先 登錄
嵌入式軟件行業(yè)增長驅動因素
MEMS聲敏傳感器分類與應用
電容式MEMS壓力傳感器有哪些優(yōu)點?純國產(chǎn)電容式MEMS壓力傳感器芯片有哪些?
MPU在嵌入式系統(tǒng)中的應用
嵌入式學習-飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
MEMS和傳統(tǒng)傳感器的區(qū)別
如何選擇合適的MEMS傳感器
adc在嵌入式系統(tǒng)中的應用 常見的adc接口類型比較
mems傳感器是什么意思_mems傳感器原理是什么
嵌入式熱門領域有哪些?
六軸姿態(tài)傾角動態(tài)傳感器
嵌入式系統(tǒng)怎么學?
維特智能MEMS傾角傳感器溫漂,實現(xiàn)精準測量
振動電阻式傳感器測量模塊的傳感器接口





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論