 揭秘RTOS任務入口函數執行完之后去哪里了
揭秘RTOS任務入口函數執行完之后去哪里了

1. 說明
在工作過程中,我發現在實際使用RTOS完成項目時,理解這些知識僅能達到會用RTOS的水平,要想用好RTOS,還需要了解一些比較細節的機制,否則容易掉坑進去,花大量時間定位問題。
本文結合TencentOS-Tiny實時操作系統給大家講述一下相關內容。
2. 任務的通常寫法
遵循“不使用就讓出”的原則,任務通常有兩種寫法。
① 「阻塞等待」某個事件處理,等待到之后處理:
voidtask1_entry(void*arg)
{
//init...
while(1){
//1.waitsomekernelobject...
//eg.tos_sem_pend,tos_mutex_pend,tos_event_pend.
//2.waitsuccess,handle!
}
}
這種寫法中,在沒有事件發生的時候,任務會因為等待某個內核對象而被掛起,讓出CPU不參與調度。
② 定時執行
voidtask1_entry(void*arg)
{
//init...
while(1){
//1.dosomething...
//2.sleep!
//eg.tos_task_delay,tos_sleep_ms.
}
}
這種寫法中,任務在干完活之后,會主動進入睡眠狀態,讓出CPU不參與調度。
3. 一次性任務
上面兩種寫法的共性是都有主循環,不需要考慮任務入口函數退出的情況,但在一些場景中任務只需要執行一次即可:
voidtask1_entry(void*arg)
{
//init...
//dosomething...
//exit?
}
「這個時候就要思考一個問題:任務入口函數執行完畢之后去了哪里?」
4. 尋找答案
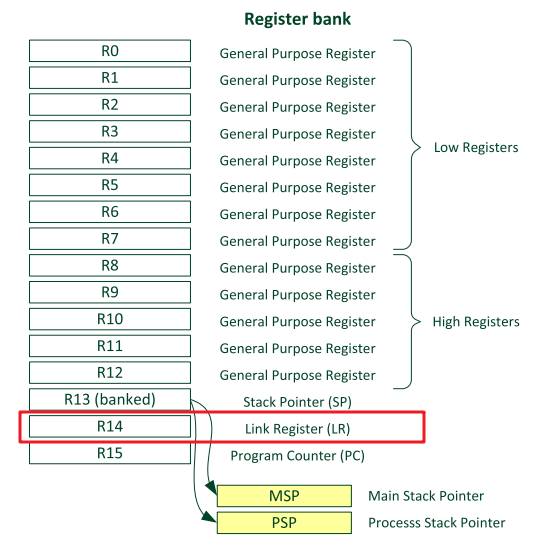
首先,「任務入口函數本質上是一個函數」,跳轉函數的指令是BL,CPU在執行該指令跳轉到某個函數執行時,會將當前PC地址作為函數返回地址、加載到LR寄存器中、保證函數執行完可以返回到這兒繼續執行,再將函數地址加載到PC寄存器、程序接著執行就到了函數中。
那么,任務入口函數沒有被別的函數主動調用,是如何被拉起來執行的呢?
任務切換分為兩步:保存上文、切換下文。切換下文就是指將保存在任務棧中的CPU寄存器組的值、加載到CPU中。
「所以,當任務棧中初始保存的CPU寄存器組的值中、PC寄存器值為該任務的任務入口函數地址時,切換下文加載之后,由于PC指向任務入口函數,所以CPU接著運行就到了任務入口函數中,也就是該任務在運行。」
同樣的道理,「任務棧中初始保存的CPU寄存器組的值中、LR寄存器的值決定了、任務入口函數退出時候返回到哪里。」
由于不同CPU架構的CPU寄存器組不同,所以初始化任務棧的代碼與架構強相關,在arch目錄下都有不同架構對應的實現。
這里我們以ARM Cortex-M4為例(Arm-v7m)看看代碼如何實現:
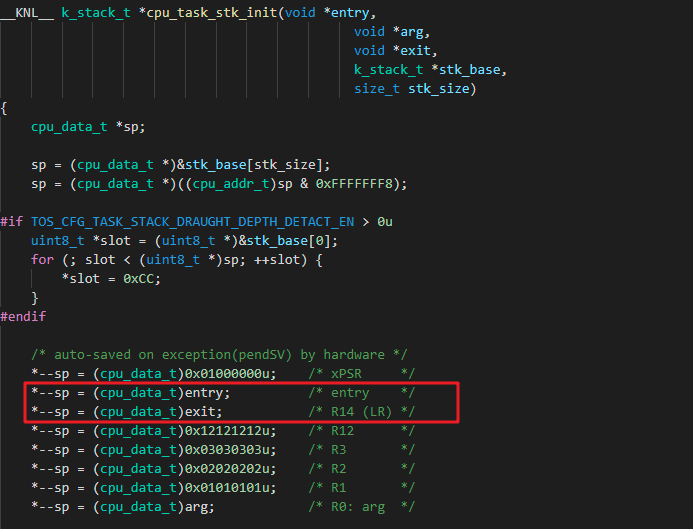
從代碼里可以看到,TencentOS-Tiny默認退出函數為exit參數指定的值,接下來我們看看退出函數~
5. 任務退出函數
在創建任務的API tos_task_create 中,初始化任務棧的過程中會指定退出函數為 task_exit:
task->sp=cpu_task_stk_init((void*)entry,arg,(void*)task_exit,stk_base,stk_size);
task_exit 函數主要完成銷毀自身的工作,具體實現如下:
__STATIC__voidtask_exit(void)
{
tos_task_destroy(K_NULL);
}
該銷毀函數傳入的參數為NULL表示銷毀自身,如果是靜態任務則按以下步驟銷毀(動態任務銷毀值得用一篇文章去講述):
- 將任務從就緒列表移除
- 將任務從等待列表移除
- 將任務從統計列表移除
- 任務狀態置為K_TASK_STATE_DELETED
6. 總結
本文講述了任務的兩種常規寫法,以及任務函數執行完畢之后去了哪里?
當任務函數執行完畢退出時,會執行到哪里由任務棧初始化時LR寄存器的值決定,RTOS內核都會提供一個默認退出函數,TencentOS-Tiny提供的任務退出函數中,會自動銷毀任務自身。
所以在編寫一次性任務時,就不需要主動調用銷毀API銷毀自身啦~
-
寄存器
+關注
關注
31文章
5433瀏覽量
124263 -
API
+關注
關注
2文章
1595瀏覽量
63934 -
函數
+關注
關注
3文章
4379瀏覽量
64747 -
RTOS
+關注
關注
24文章
849瀏覽量
121078
原文標題:RTOS 任務入口函數執行完之后去哪里了?
文章出處:【微信號:strongerHuang,微信公眾號:strongerHuang】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
【RA4L1-SENSOR】05 按鍵實現RTOS任務切換
揭秘LuatOS:實時操作系統RTOS核心庫的關鍵技術剖析!
RTOS中的本地存儲指針使用

使用任務通知提高RTOS應用的效率
如何獲取入口函數不是__iar_program_start的Program entry的stack使用情況





 工商網監
工商網監
評論